基于FPGA的激光光束自对准电气自动化系统设计
2017-05-24唐明
唐 明
(西安培华学院,西安 710125)
基于FPGA的激光光束自对准电气自动化系统设计
唐 明
(西安培华学院,西安 710125)
激光光束技术运用的越来越广泛,包括光通信技术,激光测距技术,激光瞄准技术等,其中光通信技术范围最广;在光通信过程中,需要面对光束发射端与接收端中心对齐的问题,增加了操作的难度;针对光通信激光光束对准难的特点,研究并设计了一套基于FPGA的激光光束对准系统,利用在FPGA芯片上设计软硬件速度快、稳定可靠、研发周期短等特点;整个系统以FPGA芯片为核心,辅以操作电路、自适应算法;实验表明, 该系统较好地符合了光束对准的要求。
FPGA;激光对准;自动化
0 引言
随着经济的发展,社会的进步和科技的发展,人们的生产生活对通信业务要求越来越多样化,对信道容量提出更高的要求,光通信技术的出现,极大的改善了通信容量和质量[1-3],对促进社会的发展提供了强有力的支撑。
近年来,依托现场可编门阵列FPGA(field programmable gate arrays)技术来加大系统运算能力,受到大量研究关注。使用FPGA芯片可以利用其可编写特点,提高研发速率从而抢占市场先机。使用FPGA及相关技术可以满足稳定可靠对线路干扰低要求[4-6]。
2013年,刘安良的基于FPGA的无线光通信多路信号同步系统研究[7];2015年,贾银杰的基于FPGA的室内可见光通信系统物理层设计与实现[8]。2016年,李宏鉴可见光通信OFDM技术在FPGA上的设计与实现[9];这些系统的设计说明FPGA技术越来越成熟并广泛运用到光通信技术领域。
本文提出,以基于FPGA技术来建设一个光通信过程中光束对准自适应的系统。以FPGA为核心,完成光束方向调节,接收端光束的测量和自适应算法。方案通过实验获得成功,验证了基FPGA技术系统的稳定高效性。
1 系统总体框架设计
整个系统的设计分为两大部分,硬件模块和软件模块。硬件部分是基于光通信光路的基础上,分为对光路的调节部分和对光束能量的检测部分。系统的软件算法是控制光路微调的部分,为了能够实现系统的自动调节功能,引入了自适应算法,合理的自适应算法可以即快又好的完成任务。
如图1所示是激光光束在通信之前的校准检测的工作示意图。在图1中,激光器发射的光束首先经过两个凸透镜(L1,L2)的扩束后,照射到反射镜(M1)上,经过反射镜改变光路路径,在光路上会存在其它改变光路径的器件,经过多次路径改变后的出射光束入射到接收端光探测桶,从而探测光束的能量。

图1 激光光束校准光路示意图
为了降低光通信中的噪音,需要接收端的接受的能量最大。接收端将收到的能量数据输入到FPGA控制器中,控制器通过比较计算能量,从而微调节线路上的光器件,细致地调节光路,使光束尽可能对准且能量尽可能的被接收端接收到。在光器件下面安装微型调制器,可以调剂器件的位置或者方向,调节方式和调节的光器件受到主控器控制。调节的依据便是收到的能量与目标能量间的误差值,根据不同的算法,误差的评定要求不同。
2 系统硬件设计
2.1 光器件微型调节模块
为了可以较好地调节光学器件,采用SH2034M型号步进电机驱动器加上步进电机作为机械调节部分。控制器的作用是控制步进电机的变加速度,其工作原理为调节控制脉冲的频率,达到减速时降低脉冲频率,升速时增高脉冲频率的目的。通过电压也可以对电机的正转反转控制。采用软件延时法或者物理定时器定时器法来确定所需脉冲的周期以及幅度:所谓软件延时法是通过一个延时程序控制脉冲频率,其具有动态的时延。
图2是SH2034M型步进电机驱动器内部的接口电路。OPTO指的是输入信号的公共端,其外部系统的VCC必须接在OPTO端。如果VCC为5 V则能够直接连接,否则,应选用其他模式方式,例如CP、DIR、FREE等端子外接电阻R,内部所需的8~15 mA的驱动电流得到保证;DIR:电平信号输入端,通过高低电平用以控制电机正/反转。为了系统的正常可靠运转,信号电平变化与CP脉冲下降沿应错开2.5 μs以上。FREE:低电平有效端,完成脱机控制,一旦此输入控制端为低电平时,电机则处于脱机自由状态。CP: 步进脉冲信号的输入端,下降沿有效,其最高响应频率设置应不低于200 kHz,并且信号电平稳定时间不得小于2.5 μs,只有这样才能保证其可以正常工作。

图2 步进电机驱动器接口电路
图3显示的是步进电机的工作方式。选中该步进机的要求是当此片选由高变低时。数据输入到内部寄存器在时钟上升沿时段。在第一个时钟期间,数据输入口保持高位表示启动位。紧接着收到两个控制位,控制步进机的工作方式。内部寄存器清零和输出停止取决于当片选为高电位时。所以,片选应该在整个工作周期内保持低电平,否则不工作。
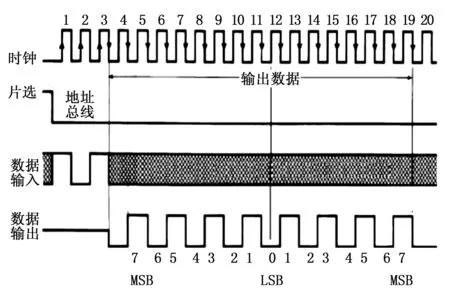
图3 步进电机时序图
2.2 能量收集模块
PIN 光检测器由三部分组成,分别为较高掺杂的P 区,N 区和半导体本征区。如果加上反偏电压,则其内部会产生耗尽层, 当光子能量大于半导体禁带宽度的光入射到器件表面时, 将产生电子——空穴对, 其在外加电场的作用下会形成光生电流。虽然PIN光检测器的工作噪声极低,但是不可以对信号进行放大。PIN 光检测器的量子效率可表示为:
η=(1-γ)(1-e-αω)
公式中Γ指的是空气与器件界面的反射损耗,而α是与光波长有关的光吸收系数, ω代表耗尽区宽度。PIN 光检测器的响应速度可以达到达纳秒量级[3], 其正常工作的工作波长为1.3 μm 和1.5 μm , 广泛应用于各种光接收机中。而具有光栅结构的光滤波器与PIN 集成的光探测器可用于WDM(波分复用)中的光波长可选择检测。
图4反应了光检测器的响应速度。光检测器是否能够对光能量快速捕捉对控制器下一步对各个光器件的路线控制很重要,如果反应过慢将导致光路调节过程缓慢,光路对准用时过长,不能及时调整系统参数,极大地影响系统效率。因此设置合适的光检测器响应速度对于系统的精准度具有重要作用。

图4 光检测器脉冲响应
3 系统软件设计
3.1 基于LMS自适应算法
假设在光路上有N个可微调节的器件用来改变光路,微调节器调节在n时刻参数为:x(n)=[x1(n)x2(n) …xN(n)]T,在n时刻检测到的能量为y(n),则他们关系:
(1)
式子中ωi为加权系数。n时刻光路的能量输出值y(n)与当前时刻所有光路器件的参数x1(n)x2(n)…xN(n)有关。将输出值和期望值进行作差得到误差值:
ej(n)=dj(n)-yj(n)
(2)
系统的设计目标就是可以自适应的调整系数降低误差值,使接收端的能量最大。
最小均方算法(LMS)依据均方误差(MSE)最小化的准则,即将系统的期望输出值和实际输出值的均方误差最小化作为目标调节系统参数。
(3)
LMS算法的代价函数为误差的均方值函数:
(4)
使代价函数最小得到LMS算法,即:
(5)
其中,α是自适应学习率,经过导数运算得LMS算法。LMS算法系数的更新公式为:
ωi(n+1)=ωi(n)+α·ej(n)·xi(n)
(6)
公式(6)中ωi(n)是第n步迭代的系数矢量,α是迭代的更新步长ej(n)=dj(n)-yj(n)为滤波器输出与期望信号的误差函数,设置合适的步长对系统的收敛速率以及精确度有着重要影响。如果步长设置大则可以快速收敛,但是却会影响精度,相反设置小步长虽然提高了精度但是却加大了系统的迭代步数。
图5是关于LMS算法简单的示意图。由图可以看出,该算法将系统测得的值与期望值之间的差值作为重要反馈参数,控制器调节各个光器件的位置或者方向,使误差值越来越小,直到取到合适的系数值。该算法可以在面对突发情况时自适应调整地调整整个系统各调节器的状态以使整个系统光路可以始终保持在对准的状态。引入LMS自适应算法后实现了系统的自动化调节,大大提高了系统的效率与适应性。

图5 LMS算法示意图
算法步骤总计以下几步:
1)首先设置各个微调节器的默认参数;
2)由于各个参数会发生调整变化,为了能够找到最合适参数,需要在系统启动工作前,加入训练序列,该序列可以提前调整各个微调节器的权值参数;
3)FPGA计算系统接收到的能量值和期望值比较,得出误差;
4)系统将测得的误差值作为反馈,系统根据反馈值自动调节设置合适的参数。
3.2 算法检测
为了验证该算法的可行性与有效性,本文对该算法的收敛情况和能量接受状态进行了数值仿真计算。 仿真中,使用矩阵数值代表各个调节器的参数,提高运算速率。对各个环节的数据进行监控记录,特别是各个时刻的误差。
图6为仿真环境下,该算法在调节参数过程中直至参数稳定的迭代图。横坐标为迭代次数,纵坐标为误差衡量值。由图可以看出,随着迭代次数的不断增加,系统的误差值也随之不断降低,直到稳定在0.5左右。综上:LMS在迭代700步后,迭代误差趋于最小值,算法收敛,收敛后的迭代误差稳定在0~0.5范围内;

图6 算法稳定所用步数
图7是仿真过程中,接收端能量分布的变化。纵坐标是能量的归一化。图7(a)是在开始阶段,由于光路为调整时的接收端能量状况,从中可以看出,能量分布在多个地方,说明能量出现了泄露导致了能量向周围扩散,降低了接收端对目标位置能量的接受。随着算法的运行,图(b)(c)(d)中能量越来越相对集中在一起,说明算法对各个参数的控制符合系统要求。仿真表明,该算法可靠有效。
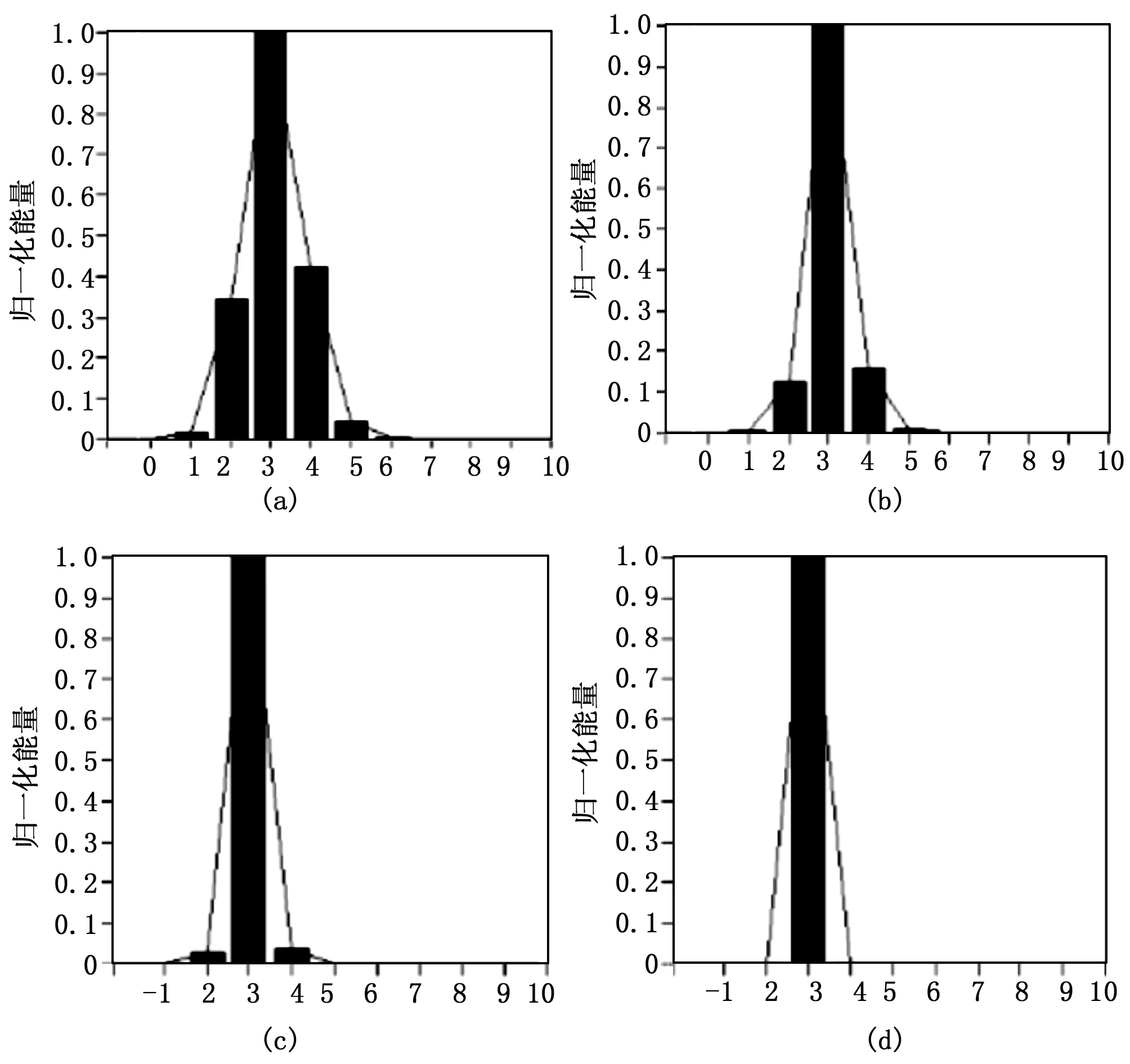
图7 接收端能量分布仿真图
4 实验结果与分析
4.1 实验过程
本次实验是在封闭的空间实验台上完成,采用波长为632nm的激光束,光束能量为5nW,传播距离为8m。光路中共加载了6个可改变光路的调节器件,每个光器件的工作波长范围均包含了632nm以此保证了每个调节器都是可工作的。实验过程中,始终保持光束在同一高度,仅仅改变光路在同一水平面的传播方向,这样可以在不影响实验结果的前提下,简化实验过程,提高验证效率。为了保证光能量探测器受到影响最低,实验过程中,需要主动关闭非必要环境光源,减少光扰动。
本次试验中,为了方便观察光束在光路中的受到的影响,在光束发送端,加载了一种螺旋相位,从而可以很容易的发现光路中光束的中心,利于调节。在接收端,可以利用螺旋相位的特点,比较容易的接收到目标光束。
4.2 实验结果及分析
本节展示实验的结果。
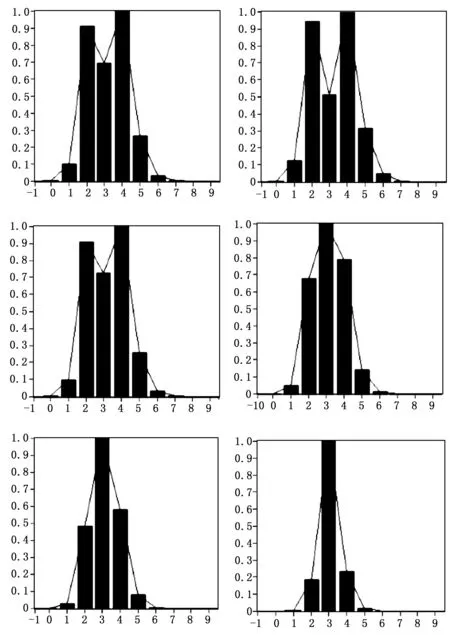
图8 实验效果图
图8是实验过程中,接收端收到的能量分布图。在实验刚开始阶段,由于系统光路仅仅靠人工肉眼对准,光路效果较差,如图8第一幅图,能量分布的非常开,说明光路非常差。在第一行的第二幅图中,能量分布似乎并没有好转,此时系统参数还在调整中,系统未稳定。在接下来的几幅图中,可以发现,能量开始集中,说明系统开始朝着接近于目标方向工作,这个过程由图8可以清楚看出。最后一幅图是实验获得的最佳状态图,能量最为集中。
从实验中,可以得出一个结论:
1)该系统可以完成光路对准功能;光路接收端的能量分布在调整后较为集中,系统具有基本工作能力;
2)系统使用的自适应算法稳定有效,算法可以根据反馈数据提供参数的修改,完成线路光路的微小调节和控制。与人工相比,大大提高了工作效率,节省了科研宝贵时间。
3)实验过程中,中心能量虽然比较集中,但还够完美。
4.3 本方案的不足
基于FPGA的激光光束对准系统可以较稳定的完成工作,但依然存在些不足:
1)算法有待完善,系统使用的算法不够快,有待优化,在自适应算法过程中,存在许多的优秀算法;不同的算法对系统的要求不一样,侧重点也有所不同。当算法过慢后,对系统的灵敏性有潜在的挑战;
2)实验获得能量集中的程度与仿真数据之间存在一定的差距,可以进一步优化;
5 结论
基于FPGA作为控制系统的核心控制芯片,设计实现激光光束中心对准系统,使之高效稳定安全运行,有效减少电能消耗。经过对系统实验分析,本系统达到了较好的效果,其运行稳定,达到了目标要求。引入了LMS算法可以在面对突发情况时自适应调整地调整整个系统各调节器的状态以使整个系统光路可以始终保持在对准的状态。实现了系统的自动化调节,大大提高了系统的效率与适应性。
[1]陈 特,刘 璐,胡薇薇.可见光通信 [J].中兴通讯技术,2013,19(1):49-52.
[2] 丁德强,柯熙政.可见光通信及其关键技术研究[J].半导体光电,2006,27(1):114-117.
[3] 金 鹏,喻春雨,周奇峰,等.LED在道路照明中的光效优势[J].光学精密工程,2011,19(1):51-55.
[4] 刘明波,顾夏华,周琳琦.(2011)基于FPGA的远程温湿度监测系统设计与实现[J].计算机测量与控制,19(11):2619-1622.
[5] 赵 晶,陈向东,陈欣鹏,等.(2013)基于FPGA的QCM湿度测量系统程序设计与仿真[J].电子设计工程,21(22):126-132.
[6] 程素娥.(2010) 基于FPGA的智能压力传感器系统[J]. 监测与仪表, 37(8):53-55.
[7] 刘安良.基于FPGA的无线光通信多路信号同步系统研究[D].大连:大连理工大学, 2013.
[8] 贾银杰.基于FPGA的室内可见光通信系统物理层设计与实现[D].北京:北京邮电大学, 2015.
[9] 李宏鉴.可见光通信OFDM技术在FPGA上的设计与实现[D].北京:北方工业大学,2016.
Design of Laser Beam Alignment Automation System Based on FPGA
Tang Ming
(Xian PeiHua University, Xi’an 710125,China)
Laser beam technology is used more and more widely, including optical communication technology, laser ranging technology, laser aiming technology, etc. the optical communication technology is the most widely used. In the process of optical communication, it is necessary to face the problem of the alignment between the transmitter and the receiver. Optical communication based on laser beam alignment difficult characteristics, research and design a set of laser beam alignment system based on FPGA, the design of hardware and software in the FPGA chip, high speed, stable and reliable, the characteristics of the short development cycle. The whole system takes FPGA chip as the core, supplemented by operating circuit and adaptive algorithm. The experimental results show that the system meets the requirements of beam alignment.
FPGA; laser alignment; automation
2017-02-13;
2017-03-07。
陕西省高等教育教学改革研究项目(15BY122)。
唐 明(1982-),男,江苏泰兴人,讲师,主要从事嵌入式开发、人工智能方向的研究
1671-4598(2017)05-0240-04DOI:10.16526/j.cnki.11-4762/tp
TP
A
