舰载火控雷达交流伺服系统仿真分析∗
2017-05-24李奔亮中国电子科技集团公司第二十研究所西安710068
马 挺 李奔亮(中国电子科技集团公司第二十研究所西安710068)
舰载火控雷达交流伺服系统仿真分析∗
马 挺 李奔亮
(中国电子科技集团公司第二十研究所西安710068)
论文介绍了在舰载火控雷达伺服系统中采用永磁同步电机,简要分析了永磁同步电机空间矢量控制技术的原理,并对其控制系统进行Simulink仿真,结果验证了在舰载火控雷达伺服中采用永磁同步电机矢量控制技术的可行性和正确性。
舰载火控雷达;交流伺服;永磁同步电机;空间矢量控制
Class Num ber TP391
1 引言
舰载火控雷达的主要功能是对敌方目标进行探测跟踪,并把打击目标的方位、俯仰以及距离等信息发送给火控系统,经过火控解算后,发送给本舰火炮或者导弹等,对目标进行火力打击。舰载火控雷达一般具有较高的测量精度、能够对目标进行准确跟踪,属于精密跟踪雷达。因此要求舰载火控雷达工作时,其伺服系统具有高精度、快速响应、鲁棒性强以及系统的高度可靠性[1]。
目前工程实际中,舰载火控雷达的伺服系统大多采用传统的直流电机。直流电机控制简单、经济,但是具有转矩脉动,难以满足火控雷达精密性的要求,并且长时间使用需要对碳刷进行维护,影响伺服可靠性。永磁同步电机控制相对复杂,但是无碳刷,提高了伺服系统可靠性,可以实现精细调速,转矩控制平稳,满足舰载火控雷达的精密跟踪的要求[2]。
本文通过建立永磁同步电机空间矢量控制技术仿真模型,验证了其在舰载火控雷达中应用的可行性和正确性[3]。
2 永磁同步电机空间矢量控制技术
永磁同步电机是一个多变量、强耦合、非线性、时变的复杂系统,其中主要复杂在强耦合。如何对强耦合的复杂系统进行控制,是永磁同步电机控制技术最主要的问题。本文采用空间矢量控制技术,通过建立正交的d、q坐标系,使得电机电流形成的电枢磁场与d轴始终垂直,实际交轴电流和系统控制所需交轴给定电流相等,采用id=0控制技术,d轴给定电流始终为0,实现对电机的解耦控制[4]。
建立电机转子doq坐标轴系。其中d轴位于转子磁链轴线上,q轴逆时针超前d轴90°空间电角度。
在doq坐标轴系下,永磁同步电机的数学模型[5]为
其中,Te为电机电磁转矩,id、iq、Ud、Uq为定子电流和电压在d、q轴的分量,ψd、ψq为定子磁链在d、q轴的分量,Ld、Lq为定子绕组在d、q轴的等效电感,Rs为定子绕组电阻,ψf为永磁体磁链,P为电机极对数。
当id=0时[6],电压方程为
如果不考虑直轴电压,从交轴电压方程看,永磁同步电机相当于一台他励直流电机。
此时电磁转矩变为
由定子电流的交轴分量成正比例的控制电磁转矩,实现转矩的解耦控制[7]。
3 建立仿真模型
整个仿真模型图如图1所示,主要的模块为PARK逆变换模块,产生PWM波形的SVPWM模块,其中SVPWM模块中包括:扇区判断、计算XYZ、计算T1T2、计算CMPR值和PWM发生模块。
控制上采用了速度、电流双闭环的方法,均为PI控制器。经过参数调试后,具有良好的控制性能。直轴电流id给定量始终为0,q轴采用了双闭环的PI控制策略[8],外环为速度环,内环为q轴电流环[9]。
3.1 PARK逆变换
在永磁同步机的分析中,一般用到三个坐标系。定子三相坐标系:oabc,定子两相坐标系αoβ,和跟随转子磁场旋转的两相旋转坐标系doq。本文Simulink仿真的最根本控制对象为d、q轴电流,需要对电机的坐标系进行转换。通过PARK逆变换,将电机的d,q轴电流转化为αoβ轴系下的电流[10,11]。
PARK逆变换
3.2 SVPWM原理
SVPWM称为空间矢量PWM波,其工作原理建立在平均值等效理论基础之上,根据平均值等效理论,在一个开关周期中对基本电压矢量进行叠加,使其平均值和给定的控制电压矢量相等,那么叠加后的电压矢量和给定的控制电压矢量效果相同。通过建立三相桥电路,控制每个桥臂的通断,可以形成如图2所示的六个非零基本电压矢量和两个零电压矢量,这些基本电压矢量将空间分为6个部分,任何一个给定的控制电压矢量Vref,都可以通过相邻的两个非零基本电压矢量和两个零电压矢量进行时间上的组合而实现。在本文的Simulink仿真中,需要运用SVPWM控制技术,合成电机控制所需要的oαβ轴系下的电压矢量U¶、Uβ。
3.2.1 扇区判断
对Vref进行矢量合成时,需要首先判断Vref处在哪个扇区,从而利用该扇区的基本电压矢量去合成[12]。
当U1>0时,令A=1,否则A=0;当U2>0时,令B=1,否则B=0;当U3>0时,令C=1否则C=0[13]。
令N=4*C+2*B+A,N和扇区号对应关系如表1所示。

表1 扇区号对应关系
根据表1建立图3所示的模型。
3.2.2 计算开关管导通时间T1,T2和导通时刻CMPR
对于合成后的电压矢量Vref,根据所处扇区不同,开关管导通时间T1T2也有所不同。具体如表2。

表2 导通时间和扇区对应关系
Udc为三相桥逆变器直流侧的母线电压。
逆变器的导通时刻通过下式计算所得:
然后根据不同的扇区,对三相全桥电路的开关管对应表3进行相应的控制[14]。
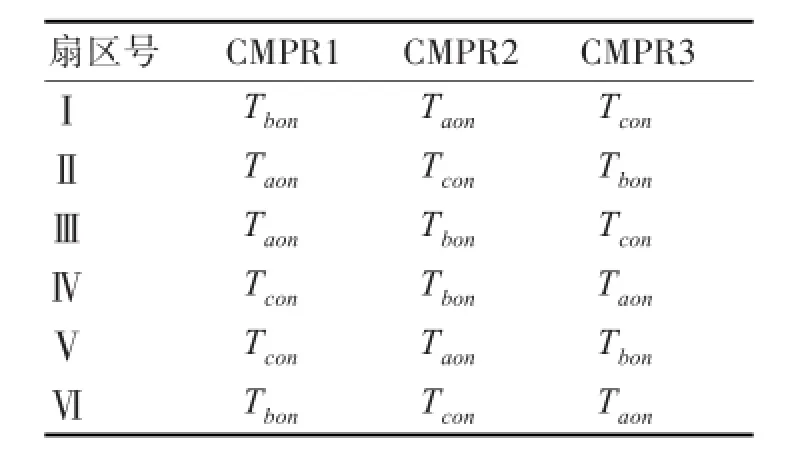
表3 CMPR和扇区对应关系
利用以上计算所得CMPR1,CMPR2,CMPR3,和等腰三角形载波进行比较[15],并进行逻辑判断[16],生成了SVPWM波形。将SVPWM波输入永磁同步电机输入端,最终实现永磁同步电机的空间矢量控制[17]。
4 仿真结果及分析
舰载火控雷达工作环境比较复杂[18],海上风力、船摇等情况都会造成伺服负载发生突变,在跟踪目标时又需要跟随目标频繁的加减速,因此,本文将通过仿真验证以上雷达伺服的工作状况下电机控制的可行性,并根据电机的各项参数,考察电机在面对各种情况时,调节时间、超调量等动态性能是否满足舰载火控雷达伺服系统要求[19~20]。
Simulink中设定和工程实际相同的仿真参数,给定力矩为80Nm,转速设定为100r/min时的三相电流,根据仿真波形图,如图8所示,可以看到大约耗时0.4s时,电机电流达到稳定。转速0.6s达到稳定值,超调量为20%。
舰载火控雷达在频繁加减速过程中,对快速性要求较高,并且要求跟踪精确。模拟雷达伺服加减速,给定负载力矩为80Nm,电机启动转速为50r/min,0.7s加速为100r/min,1.4s转速下降至50r/min。电机各指标如下图9所示,可以看出,无论是加速还是减速,电机都可以在0.6s之内调整至给定转速,转速超调量不超过20%。在加速时,电机力矩会有瞬时转矩脉冲,脉冲宽度大约为0.1s,力矩脉冲幅度大约为80Nm。转速增加后,三相电流频率明显增加。
舰载火控雷达工作环境较为恶劣,外界环境的不稳定(风速、船摇等)造成雷达伺服负载力矩经常发生变化。因此,模拟雷达伺服负载力矩发生突变时,永磁同步电机的各项动态性能。保持电机转速为100r/min不变,负载力矩一开始为80Nm,0.7s负载力矩改变为160Nm,电机各项指标如图10所示。分析可知,无论增加力矩负载还是减小负载,力矩调节时间均小于0.5s。电机启动时力矩超调量较大,启动后改变力矩,超调量均小于20%,满足电机平稳运行要求。负载力矩改变时,电机转速基本保持恒定。力矩增加时,三相电流的幅值和频率明显增加。
5 结语
本文建立了永磁同步电机空间矢量控制的Simulink仿真模型,模拟了舰载火控雷达伺服系统在实际中经常会遇到的工作情况,通过分析电机的各项动态参数,验证了应用空间矢量技术控制的永磁同步电机满足雷达伺服系统的各项要求。验证了其用于火控雷达伺服系统中的可行性和正确性。
[1]魏刚.现代战舰舰载火控系统[J].当代海军,2009(004):66-69.
[2]刘世挺.雷达伺服控制技术的新发展[J].火控雷达技术,2002,31(1):33-35.
[3]李烨,严欣平.永磁同步电动机伺服系统研究现状及应用前景[J].微电机,2001,34(4):30-33.
[4]陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学,2004.
[5]李三东,薛花,纪志成.基于Matlab永磁同步电机控制系统的仿真建模[J].江南大学学报:自然科学版,2004,3(2):115-120.
[6]甄红涛,齐晓慧.雷达伺服系统的模糊自适应PID控制器设计[J].四川兵工学报,2009,30(6):12-14.
[7]郑博元,张荣建,胡建辉,等.基于PI的永磁同步电机转矩脉动抑制研究[J].微电机,2016,49(7):32-34.
[8]左月飞,张捷,刘闯,等.基于自抗扰控制的永磁同步电机位置饲服系统一体化设计[J].电工技术学报,2016,31(11).
[9]何继爱,王惠琴.永磁同步电机空间矢量控制系统的仿真[J].电力系统及其自动化学报,2005,17(6):14-16.
[10]李宏,张勇,王晓娟,等.永磁同步电机SVPWM控制策略仿真研究[J].微电机,2009(1):86-88,97.
[11]杨平,马瑞卿,张云安.基于Matlab的永磁同步电机控制系统建模仿真新方法[J].微电机,2005,38(5):38-41.
[12]孙凯,许镇琳,邹积勇.基于自抗扰控制器的永磁同步电机无位置传感器矢量控制系统[J].中国电机工程学报,2007,27(3):18-22.
[13]王斌,王跃,王兆安.空间矢量调制的永磁同步电机直接转矩控制[J].电机与控制学报,2010,14(6):45-50.
[14]谢运祥,卢柱强.基于MATLAB/Simulink的永磁同步电机直接转矩控制仿真建模[J].华南理工大学学报:自然科学版,2004,32(1):19-23.
[15]陈荣,邓智泉,严仰光.永磁同步伺服系统电流环的设计[J].南京航空航天大学学报,2004,36(2):220-225.
[16]刘婷婷,谭彧,吴刚,等.基于SVPWM的高转速永磁同步电机控制系统的研究[J].电力系统保护与控制,2009(12):11-14.
[17]张绍,周波,葛红娟.基于双空间矢量调制的矩阵变换器-永磁同步电机矢量控制系统[J].电工技术学报,2007,22(4):47-52.
[18]朱浩,刘峻,陈铠.船载雷达伺服远程辅助诊断系统的研究与设计[J].飞行器测控学报,2010(4):55-57.
[19]盛洪江.某雷达伺服系统的分析,辨识与仿真[D].长沙:国防科技大学硕士学位论文,2002.
[20]潘高峰,周江.船载雷达伺服系统的建模与仿真[J].电子工程师,2007,33(6):7-9.
Analysisof AC Servo System of Ship Fire ControlRadar M odelling
MA Ting LIBen liang
(No.20 Research Institute,CETC,XiƳan 710068)
This paper introduces PMSM(PermanentMagnet SynchronousMotor)in ACservo system ofship fire control radar,analyzes space vector controlmethod of PMSM,and control system ismodeled in Simulink.Simulation results show the feasibility and validity of space vector controlmethod of PMSM in ship fire control radar.
ship fire control radar,ACservo system,PMSM,space vector control
TP391 DO I:10.3969/j.issn.1672-9730.2017.05.019
2016年11月10日,
2016年12月20日
马挺,男,硕士,助理工程师,研究方向:雷达伺服系统、雷达水控系统。李奔亮,男,硕士,研究方向:雷达伺服系统。