基于一致性的多UUV协同目标跟踪算法∗
2017-05-24任建存吕俊伟海军航空工程学院控制工程系烟台264001
任建存 吕俊伟(海军航空工程学院控制工程系烟台264001)
基于一致性的多UUV协同目标跟踪算法∗
任建存 吕俊伟
(海军航空工程学院控制工程系烟台264001)
针对分布式多UUV协同目标跟踪问题,考虑到其具有局部通信和目标运动模型变化的特点。提出了基于一致性的交互多模型目标跟踪算法。首先,建立了跟踪问题的模型;其次,提出了一致性交互多模型目标跟踪算法,并给出了算法的流程;最后,通过仿真实验,验证了该算法的有效性。结果表明,该算法可以满足对目标运动模型变化的跟踪问题的要求,当被跟踪目标的运动模型发生变化时,仍能较精确地对目标进行跟踪。
无人水下航行器(UUV);分布式;目标跟踪
ClassNumber TP391.41
1 引言
利用无人水下航行器(UUV)对水下目标跟踪进行的问题已成为当今的研究热点[1]。在复杂的任务背景下,单个UUV的能力十分有限,通常不足以满足对被跟踪目标进行精确、持续跟踪的要求。因此,需要利用多个UUV协同对目标进行跟踪,获得对目标更精确的定位。在多UUV目标跟踪任务中,分布式估计方法越来越受到人们的关注。与传统的集中式和分散式估计方法不同,分布式估计方法的网络结构中不需要融合中心,只要求每个UUV节点与其满足通信条件的邻居节点进行通信,这样可以减少通信负荷,并且不会因为某一个UUV的失效而导致整个跟踪任务失败。
多智能体一致性理论是解决分布式问题的一个重要方法,文献[2]将其应用于分布式传感器网络中。文献[3]提出了利用平均一致性策略对量测和协方差矩阵进行加权的分布式卡尔曼滤波方法。文献[4]从理论探索和实际应用两个方面介绍了多智能体一致性理论的研究现状,并结合当前研究进展探讨了多智能体一致性理论发展趋势。近年来,越来越多的学者针对多智能体一致性理论及其应用进行了研究[5~8]。
在大多数情况下,被跟踪目标的运动模型往往不是固定不变的,而是由多个模型组合而成。文献[9]中的交互多模型算法是解决这一问题比较好的方法。交互多模型方法,考虑在某一时刻,每个模型滤波器都有可能成为当前有效的系统模型滤波器,每个滤波器的初始条件都是基于前一时刻各条件模型滤波结果的合成。文献[10]研究了跳变马尔科夫非线性系统的分布式滤波方法。文献[11]基于无色变换、交互多模型和信息滤波,采用递阶分布式融合估计结构,提出一种分布式无色信息滤波算法。
本文将一致性策略和交互多模型方法引入到分布式水下目标跟踪问题中。提出在分布式结构下基于一致性的交互多模型目标跟踪算法,研究多UUV的分布式协同目标跟踪问题。本文的结构如下:首先,建立目标跟踪问题模型。然后,介绍一致性策略,并将其应用到分布式无色卡尔曼滤波(UKF)中,提出一致性交互多模型目标跟踪算法。最后,通过仿真与单模型目标跟踪算法在估计误差等指标方面进行比较。
2 问题模型
考虑如下离散时间马尔可夫跳变系统:
其中,xkÎRn,Rp分别是目标状态向量和第i个UUV节点的量测向量。假设过程噪声ωk-1(rk)和量测噪声)是互不相关的零均值高斯白噪声过程,其协方差矩阵分别为Qk-1(rk)和(rk)。各个节点之间的通信拓扑可以用有向图G=(V,ε)表示,其中V={1,2,…,N}表示UUV节点,边(j,i)Îε表示节点j节可以与节点i进行通信。用Ωi={j|(j,i)Îε}表示能与第i个节点进行通信的所有节点的集合。f是被跟踪目标状态向量的转移函数,hi为第i个节点的量测函数。rk表示由离散时间马尔科夫链表述的系统模型。假设rk的取值在有限集N={1,2,},转移概率矩阵为Π=[πrs]M´M,其中:
常见的目标运动模型有常速模型(CV)、匀速转弯模型(CT)等。CV模型的数学描述为
CT模型数学描述为
p为转弯角速度,TCT为采样周期。
UUV观测模型的数学表达式为
3 一致性交互多模型目标跟踪算法
3.1 一致性策略
在分布式UKF中,每个节点只能同与它满足通信条件的邻居节点进行通信。为了达到与集中式等同的结果,在UKF预测步和更新步之间引入一致性策略,经典的一致性算法形式化描述如下[12]。
其中,W为一致性加权系数,基于式(8)加权迭代,当d®¥时,所有节点状态的状态估计值达到一致,即(d)=(d)。常用的一致性加权系数矩阵由最大度加权和Metropolis加权。
1)最大度加权WN:
对于问题模型式(1)、(2),由于被跟踪目标的运动模型是变化的,因此,我们同时引入交互多模型方法,满足对多模型运动目标的跟踪。
3.2 算法流程
假设被跟踪目标在k-1时刻的运动模型为r,在k时刻的运动模型为b。在k-1时刻,第i个UUV节点对被跟踪目标的状态估计为xik
,-r
1|k-1,其协方差矩阵为Pki,
-r1|k-1。算法的计算步骤如下(以第i个UUV节点为例):
步骤1:模型条件重初始化
步骤1.1:计算混合概率
步骤2:滤波器预测
步骤2.1:计算σ点
步骤3:一致性融合
步骤4.2:计算预测量测值和互相关协方差矩阵
步骤5:模型概率更新
步骤5.1:计算量测预测残差及其协方差矩阵
4 仿真实验及结果
假设任务区域内有6架UUV对同一运动目标进行跟踪。目标在二维平面内运动,每架UUV可获得对被跟踪目标有噪声的量测。各个UAV之间能否进行通信由拓扑结构决定。目标的运动模型在CV模型和CT模型之间切换。目标的状态向量为xk=[xk,,T,其中xk,yk为目标的位置,xk,yk为目标的运动速度。目标的初始状态为x=[0m,5m/s,0m,5m/s],转弯角速度p=ad s。
0每架UUV对目标进行观测,得到的量测向量为=[r,θ],其中,r为UUV与目标之间的距离,θkkkk为UUV与目标之间的视线角,量测误差协方差矩阵为Ri=diag[5,0.5],且各UUV之间的测量互不相关。使用Metropolis加权WM作为一致性加权系数。
在仿真实验中,为了衡量算法的估计精度,这里定义了估计误差E,具体形式如下:
图2~图5给出了利用本文算法和两种单模型目标跟踪算法(简记为CV和CT)在目标位置估计误差方面的对比。
表1给出了50次蒙特卡洛仿真实验中,不同算法的每个UUV的估计误差最大值、最小值、平均值的均值统计结果。
由图1~图6和表1可以看出,本文提出的算法中每个UUV的估计误差均小于单模型跟踪算法,且误差在一个较小的范围内波动。在单模型跟踪算法中,如果算法模型与目标运动模型不匹配,则会出现较大的位置估计误差,而本文算法在目标模型变化后,任然能以较小的估计误差对目标进行跟踪。
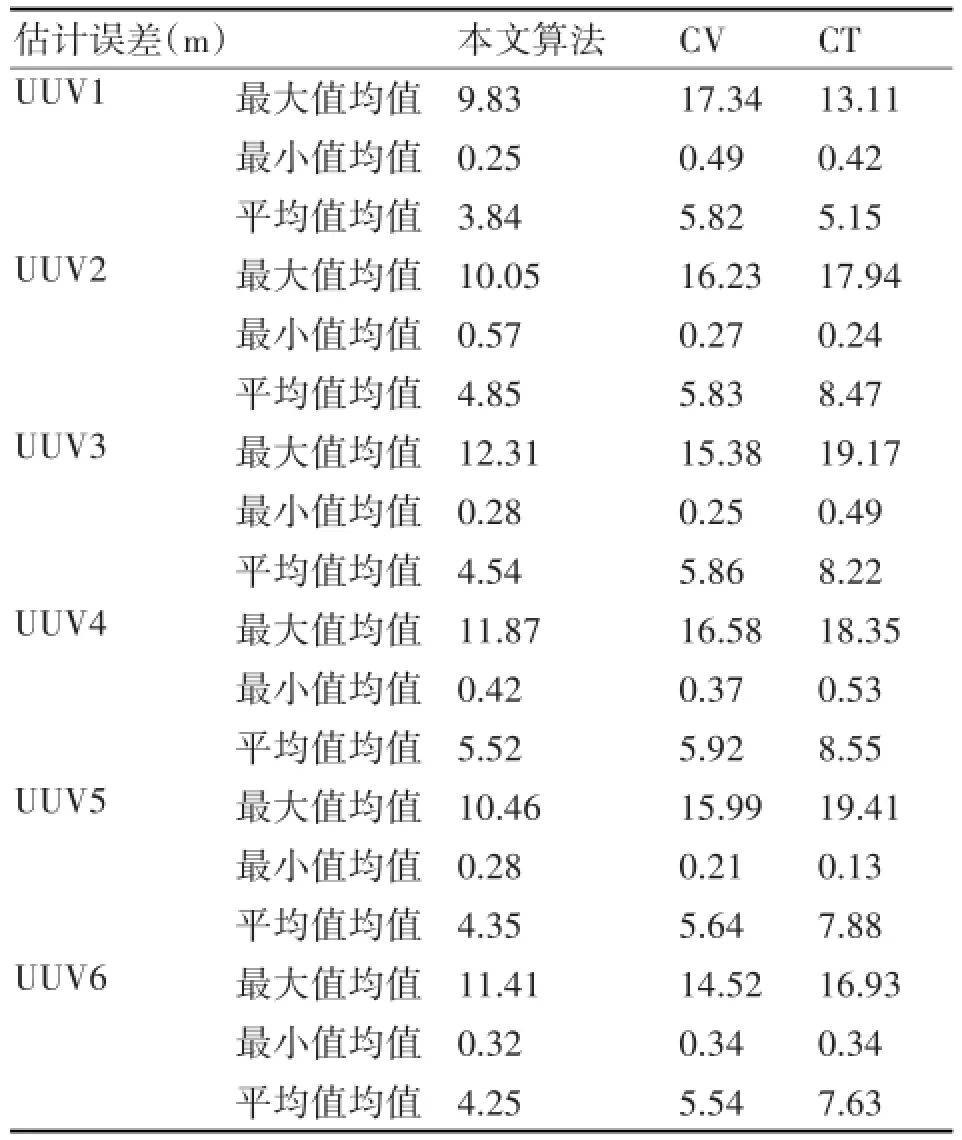
表1 估计误差对比
5 结语
针对分布式条件下的多UUV协同目标跟踪问题,本文将一致性策略和交互多模型算法结合,提出了基于一致性的交互多模型目标跟踪算法。一致性策略的运用,很好地解决了在分布式结构中,UUV节点之间的估计存在偏差的问题,通过一致性策略对偏差进行校正,使各个节点得到尽可能一致的状态估计。而交互多模型算法则解决了被跟踪目标的运动模型可能存在变化的问题。仿真实验表明,本文提出的目标跟踪算法,可以以较小的误差对目标进行跟踪,且不受目标运动模型变化的影响。
[1]YAO Yao,XU Demin,ZHANG Lichuan,YANWeish⁃eng.Cooperative Localization ofMultiple UUVswith Com⁃munication Delays—A Real-time Update Method Based on Path Prediction[J].ROBOT,2011,33(1):161-168.
[2]LIN X and STEPHEN B.Fast linear iterations for distribut⁃ed averaging[J]Systems and Control Letters,2004,53(1):65-78.
[3]REZA O Sand JEFFSS.Consensus filters for sensornet⁃works and distributed sensor fusion[C]//Proceedings 44th IEEE Conference Decision Controland the European Con⁃trol Conference,Seville,Spain,Dec.12-15,2005:6698-6703.
[4]张庆杰,朱华勇,沈林成.多智能体一致性理论研究进展[C]//2010中国制导、导航与控制学术会议,2010:40-46.
[5]XIF,HE Jand LIU Z.Adaptive fast consensus algorithm for distributed sensor fusion[J].Signal Processing,2010,90:1639-1699.
[6]JIANG X Y,LU B Z,REN P et al..Augmented Filtering Based on Information Weighted Consensus Fusion for Si⁃multaneous Localization and Tracking viaW ireless Sensor Networks[J].International Journal of Distributed Sensor Networks,2015,391757:1-7.
[7]CHEN Y M and ZHAO Q J.A Novel Square-Root Cuba⁃ture Information Weighted Consensus Filter A lgorithm for Multi-Target Tracking in Distributed Camera Networks[J].Sensors,2015,15:10526-10546.
[8]ARASH M and AMIR A.Distributed Consensus+Innova⁃tion Partical Filtering for Bearing/Range Tracking with Communication Constraints[J].IEEE Transactions on Si⁃nal Processing,2015,63(3):620-635.
[9]H.Blom and Y.Bar-Shalom.The interacting multiple model algorithm for systemswith Markovian switching co⁃efficients[J].IEEE Transactions on Automatic Control,1998,33(8):780-783.
[10]Wenling Li,Yingm in Jia.Consensus-Based Distributed MultipleModelUKF for Jump Markov Nonlinear Systems[J].IEEE Transactions on Automatic Control,2012,57(1):230-236.
[11]WANG Lin,WANG Nan,ZHU Huayong,SHEN Lincheng.Distributed fusion estimation algorithm for multi-UAVs cooperative sensing[J].Control and Deci⁃sion,2010,25(6):814-820.
[12]LIU Chenglin,TIAN Yuping.Survey on consensus prob⁃lem of multi-agent systems with time delays[J].Control and Decision,2009,24(11):1601-1609.
M u lti-UUV Collaborative Target Tracking A lgorithm Based on Consensus
REN Jiancun LV Junwei
(Departmentof Control Engineering,Naval Aeronauticaland Astronautical University,Yantai 264001)
To the problem of distributedmulti-UUV target tracking,which has the characteristics of the local communication and the changes of targetmotion model,a target tracking method based on consensus strategy and interacting multip lemodel is proposed.Firstly,a target tracking system isestablished.Secondly,the target trackingmethod and its processare presented.Finally the effectiveness of themethod is proved by simulation.The results show that thismethod canmeet the requirementof tracking the targetmotionmodelwhich changeswith time,and the estimation error is small.
unmanned underwater vehicle(UUV),distributed,target tracking
TP391.41
10.3969/j.issn.1672-9730.2017.05.008
2016年11月3日,
2016年12月17日
任建存,男,博士,教授,研究方向:目标识别与精确制导。吕俊伟,男,博士,教授,研究方向:目标识别与精确制导。