基于AT89(352单片机智能循迹小车的设计
2017-05-22王鲲鹏初俊博钟至诚杨传志
王鲲鹏+初俊博+钟至诚+杨传志

摘要 本系统采用AT89C52单片机为核心进行设计,合理利用了该芯片上丰富的资源,主要实现小车的寻迹功能,通過小车上的摄像头对获取的信息进行实时显示,同时可以通过PWM信号控制小车的速度。
关键词 循迹;AT89C52
中图分类号 TP3 文献标识码A 文章编号2095—6363(2017)03—0053—02
1功能设计
未来智能机器人的出现为我们的生活提供便利是必然的事情,循迹作为智能机器人的一个重要组成部分我们进行了本次的设计,对循迹功能有了更深的理解。本次设计系统主要是利用小车的红外检测模块,小车控制模块AT89C52单片机通过红外检测模块等采集到的信息控制小车自动转,实现小车自动沿预定黑线行走而且不出线,并在到达终点后自动停止这一导航过程。
2循迹模块
小车的循迹主要是靠小车的红外检测模块来实现的,红外检测模块主要是由红外发射器和红外接收器组成,其原理是利用黑色和其他颜色对红外线的吸收作用不同,使得红外接收器接收到的红外反射不同,改变其输出电平,从而判断黑线所在。
红外检测电路如图1所示,此电路工作原理为:红外检测模块共有2个回路,分别连接着红外发射器和红外接收器,回路中还连接也用于改变红外发射接收功率的可调电阻,用于调节红外检测的距离。当红外检测模块检测到非黑色(颜色偏亮色)时,红外发射器所发射的红外光线被白色反射接收到,使得自身的光电三极管导通,引脚将检测到低电平输出模拟量AOUT,通过比较器,输出为低电平DOUT,单片机上小灯亮,相反,当检测到黑线时,红外发射器所发出的红外被黑色吸收,光电三极管截止,引脚检测为高电平输出模拟量AOUT,通过比较器,输出为高电平DOUT,单片机上小灯灭,单片机根据这个开关量做出反应,调用相关的子函数,来控制小车的左右转向,前进停止。
3循迹模块的安装测试
1)将2路探头呈一行布置在智能车的前方,探头朝下,采用铜柱+螺丝方式固定,中控板固定在车上,探头引出3根杜邦线,分别连接电源线、地线、数据线,通过车身上的孔连接到单片机上。
2)此次调试主要是调节红外检测传感器电路的阻值,由于这个电阻可以调节红外发射管的发射功率,提高其发射功率就能调节其有效距离,但是由于没有补偿电路,在调节过程遇到了很多的麻烦,即外界的干扰强,如果电阻调的过小,那么红外发射管的发射功率过大,从而使得有效距离太远,检测距离太近造成对黑线也反射,失去了检测黑线的意义,但是如果电阻太高,使得发射功率过小,使得对白线也是低电平,同样失去了检测的意义,在接近需要电阻时,自然光的影响较大,甚至外界光线稍微变化,就会出现输出电平的变化,为了解决这个影响,我们配置抗干扰能力强的红外装置,并将红外检测传感器在稍微弱的光线下有效距离调到2cm~3cm,获得了极大的成功,即使在强光的照射下,依然能能够很好的使用,经测试,检测成功。
4循迹小车动作的实现
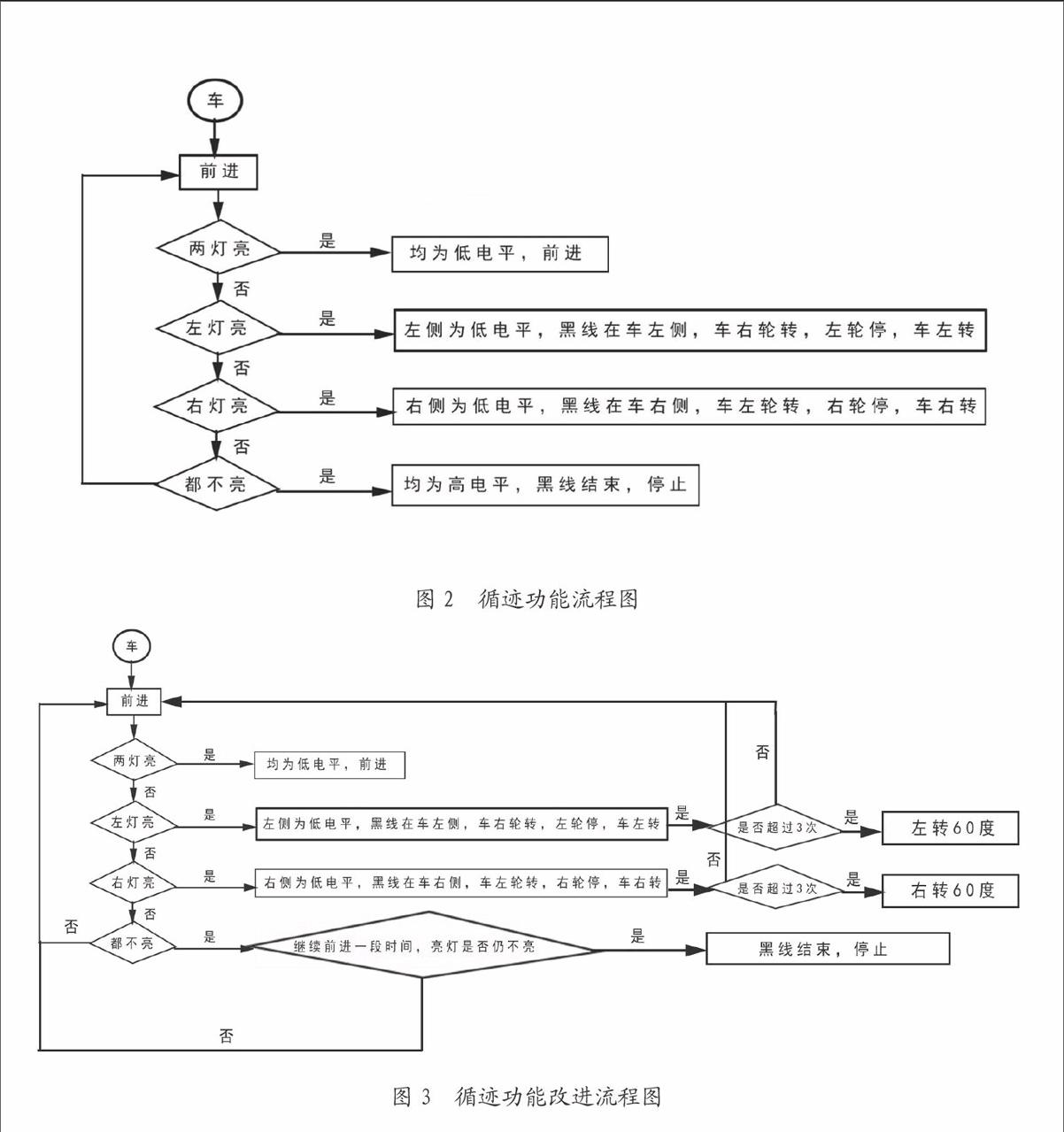
小车行走过程中,程序需要接受红外检测传感器电路输入的信息,判断其意义,调用一系列小车的子函数,以完成小车的循迹功能,其流程图如图2所示。
5循迹性能的提升
在完成循迹功能之后,实践中出现了如果小车所循迹的路线存在直角,或者黑线有一小段缺失,小车将无法正确判断此时的状态,为此做了一些改进,对于直角弯这个情况,在程序中添加了计数器,如果小车一直朝着一个方向转向超过3次,小车会自动朝着这个方向转动60°,对于黑线缺失这一情况,在小车检测到黑线结束了之后,通过延时程序使它继续前进一段距离,在确认没有黑线后才会停止。具体的流程图如图3所示。
6展望
由于循迹模块的感应部分位于小车车头偏下的位置,且没有过多的保护措施,如果遇到较崎岖的路段,可能在行走过程中对感应部分造成损坏。而且因为小车的车身比较高,无法保证在较低的高度下循迹可以正常循迹行驶。下一阶段还需研究解决的方案,可以通过给感应部分添加保护罩等方式来实现稳定安全的循迹,通过适当的调高红外检测模块的高度,强度等来保证在较低高度下小车仍能正常循迹行驶。