基于MATLAB/Robotics Toolbox的PUMA560机械臂仿真研究
2017-05-22王娜
王娜

【摘 要】本文采用标准D-H法对六自由度关节机器人的机构和运动学进行分析,推导出正逆运动学变换公式。在此基础上,本文运用Matlab机器人工具箱对机器人系统进行了运动仿真,研究了机器人在作业过程中的主要运动学指标的变化情况,十分直观地反映出机器人这一非线性耦合结构中各杆件和末端工作部分的运动状态,为机器人的具体研制、控制策略提供了理论依据。
【关键词】PUMA560机械臂;运动学;动力学;仿真
1 PUMA560简介
对机器人进行图形仿真,可以直观显示出机器人的运动情况,得到从数据曲线中难以分析出来的许多重要信息,并能从图形上看到机器人在一定控制条件下的运动规律。从仿真软件中观察机器人工作程序的运行结果,就能分析出该机器人轨迹规划等的正确性和合理性,从而为离线编程提供有效的验证手段。
PUMA560 机械臂是一种示教机器人。有六个自由度,包括6个旋转关節,模仿人的腰、肩、肘和手腕运动,能以规定的姿态到达工作范围内的任何一个点。包括:臂体、控制器和示教器三个部分。它的外观图如图1 所示。
2 PUMA560的空间坐标系建立
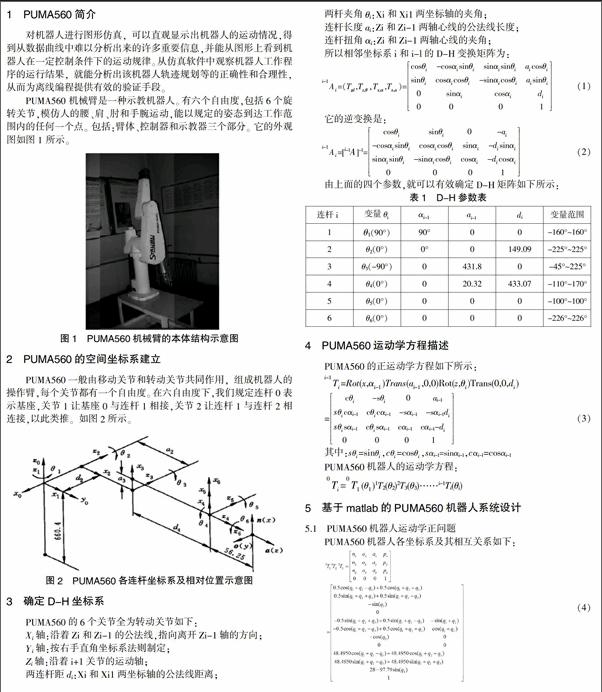
PUMA560一般由移动关节和转动关节共同作用,组成机器人的操作臂,每个关节都有一个自由度。在六自由度下,我们规定连杆0表示基座,关节1让基座0与连杆1相接,关节2让连杆1与连杆2相连接,以此类推。如图2所示。
3 确定D-H坐标系
PUMA560的6个关节全为转动关节如下:
Xi轴:沿着Zi和Zi-1的公法线,指向离开Zi-1轴的方向;
Yi轴:按右手直角坐标系法则制定;
Zi轴:沿着i+1关节的运动轴;
两连杆距di:Xi和Xi1两坐标轴的公法线距离;
两杆夹角θi:Xi和Xi1两坐标轴的夹角;
连杆长度ai:Zi和Zi-1两轴心线的公法线长度;
连杆扭角αi:Zi和Zi-1两轴心线的夹角;
所以相邻坐标系i和i-l的D-H变换矩阵为:
6 结论
本文利用 MATLAB Robotics Toolbox 建立了PUMA560机器人的三维模型,分析了它的正运动学、逆运动学和轨迹规划问题,验证了仿真的合理性。
【参考文献】
[1]李有善.自动控制原理.北京.国防工业出版社.2005,1:287-288.
[2]陈平,罗晶.四自由度机械臂的模型参考自适应双重控制.哈尔滨工业大学学报.2009.7:68-70.
[3]韩建海.工业机器人.华中科技大学出版社.2009.9
[4]朱世强,王宣银.机器人技术及其应用.杭州:浙江大学出版社,2001,114-134.
[5]吴瑞祥.机器人运动轨迹规划与算法[M].北京:北京航空航天大学出版社,1994,142-146.
[6]钱东海,谭伟,赵锡芳.基于B样条路径的机器人时间最优轨迹规划[J].上海交通大学学报,1998,32(12):29-33.
[7]蒋新松.机器人导学[M].沈阳:辽宁科学技术出版社,1994,87-93.
[8]王奇志,徐心和,尹朝万.PUMA机械手逆向运动方程新的推导方法及求解[J].机器人,1998,20(3):81-87.
[9]蔡自兴.机器人学[M].第2版.北京:清华大学出版社,2009:47-48.
[10]陈伟华.工业机器人笛卡尔空间轨迹规划的研究[D].广州:华南理工大学,2010.
[责任编辑:朱丽娜]