地铁列车测速及定位技术研究
2017-05-20刘广泽
刘广泽

摘 要:TRAINGUARDMT(TGMT)系统是一种列车自动控制系统,该系统可用于地铁、高速铁路、短途列车及轻轨系统。本文简要介绍了TGMT系统中基于多传感器信息融合的列车测速定位技术。通过研究多传感其信息融合测速定位的原理,对现场使用过程中出现的各类故障进行分析,为现场维护提出建设性意见。
关键词:列车自动控制系统;多传感器信息融合;脉冲转速传器;多普勒雷达
中图分类号: 文献标识码:A 文章编号:1671-2064(2017)08-0065-02
Abstract:TRAINGUARDMT (TGMT) is an automatic train control system for metros, rapid transit, commuter and light rail systems for the world market. This paper introduces the technology of speed measurement and train location based on multi-sensor fusion. By studying the principle of multi-sensor fusion speed measurement, this paper analyzes various kinds of faults occurred in the process of field use, and puts forward some constructive suggestions for field maintenance.
Key words:automatic train control ; multi-sensor fusion; odometer pulse generator; doppler radar
1 绪论
广州地铁四、五号线以及广佛线使用的是西门子的TRAINGUARDMT(简称TGMT,下同)系统,是基于无线通信的自动列车控制系统(CBTC),是一种连续的自动列车控制系统。它利用高精度的列车定位,采取双向连续、大容量的车地数据通信,依靠车载、轨旁的安全功能处理器来加以实现。其通过多传感器信息融合技术,结合不同传感器的优点,弥补各自的缺点,通过冗余互补提供更加可靠、精确的列车速度和位置信息。
2 测速定位技术
测速定位技术是通过不断测量列车的运行速度、对列车的即时速度进行积分的方法,从而得到列车的运行距离,辅助其他定位方法(如查询-应答器定位、电子地图匹配)来获取列车的位置信息。
2.1 脉冲转速传感器(odometer)
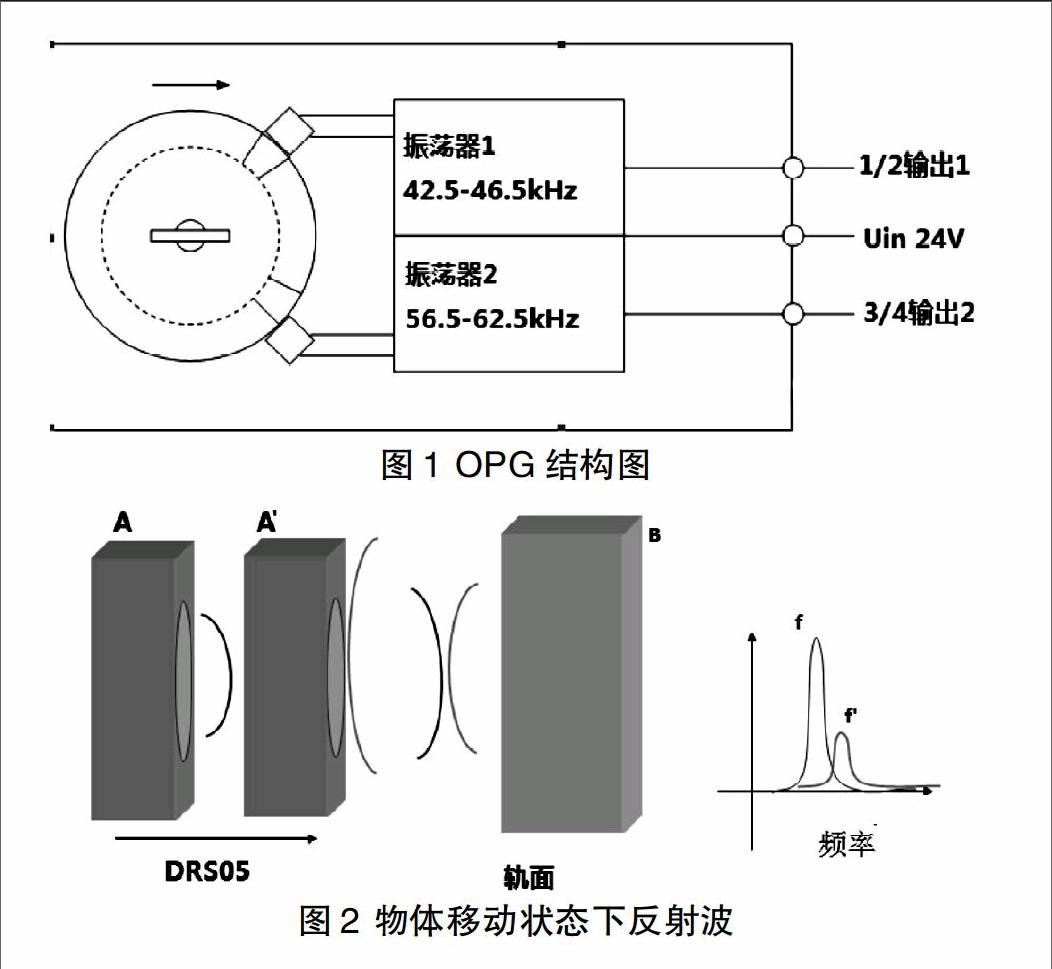
脉冲转速传感器(odometer)由磁头、脉冲整形放大电路、频率/电压转换电路及滤波电路组成。磁头是产生脉冲信号的部件,它产生的脉冲信号的频率与转速成比例,在主机的主轴上装一个齿轮(该齿轮与车轮同轴),把磁头对准齿顶固定,磁头与齿顶之间保持一个较小的间隙,当齿轮转动时,磁头将交替对准齿顶和齿槽,即可输出脉冲信号。通过列车车轮转动产生数字脉冲,输出脉冲信号通过信号处理后,可直接输入微处理器进行计算,得到高测量精度的速度、距离信息。广州地铁四、五号线使用的脉冲转速传感器是西门子里程脉冲发生器——Siemens 16P OPG,结构如图1所示。其内部有两个振荡器系统,由与车轮同轴的齿轮转动时进行脉冲计数,分别产生两个不同频率的脉冲序列,由车载控制单元的ODO5板采集速度脉冲信号,进行处理计算出其距离与速度值。
2.2 多普勒雷达(Doppler radar)
多普勒雷达依靠雷达向地面发射信号,检查雷达回波频率与发射信号频率的不同,根据多普勒效应计算列车的运行方向和速度,再对列车的速度进行积分,得到列车的运行距离。
多普勒雷达根据多普勒效应进行雷达测速。多普勒效应描述:波在波源移向观察者时接收频率变高,而在波源远离观察者时接收频率变低。雷达测速公式(λ电磁波工作波长;v目标与雷达的相对速度;fd雷达工作电磁波的频率偏移量)。
广州地铁四、五号线使用的是DEUTA生产的DRS05多普勒雷达,利用多普勒效应测量正在运行的车辆的速度。应用Ku波段电磁波,频率为22GHz,测量发射和接收的微波之间的频率差。综合发射波角度,并通过两个相移90度的混频器(旋转指针)混合信号得到复合值。由于发射面并不是严格的一个点,所以得到的值还需经过内部算法处理,最后计算出雷达速度,如图2所示。
2.3 多传感器信息融合测速定位
广州地铁四、五号线的列车通过OPG与雷达两个传感器信息融合進行测速定位。在不同的状态下,对两个速度测量值进行加权平均,计算出列车的实时速度,对速度进行时间积分计算出行驶的距离。例如:在高速行驶时,OPG因为空转打滑易产生误差,更多参考雷达测速值,低速时由于多普勒效应对于低速物体测速偏差相对较大,则考虑OPG较多。
OPG和雷达的测速定位信息通过OBUC_ATP的计算产生前端位置不确定性以及后端位置不确定性。当其中一个测速传感器发生故障或工作状态出现问题时,相应的位置不确定性就会不正常地增长,当总的位置不确定性达到设定的150米时OBUC_ATP就会输出紧急制动。图中的列车当前速度即为OBCU_ATP融合OPG和雷达的测速结果计算得到的列车实时速度。
2.4 TGMT列车的定位过程
列车通过应答器及测速传感器进行精确定位。就可实现列车定位功能。应答器安装于轨道中间,由列车本身激活(是一种被动设备)。当车载天线激活该应答器时,应答器发送自身存储的应答器安全报文,报文中包括了应答器的标识以及相关的TDB数据,尤其是该应答器的中间地理位置。
应答器支持安全定位,所使用的应答器安全检测精度是一个系统参数。为了实现应答器的安全定位,在车载天线距应答器的距离超出给定的距离时,列车是接收不到应答器报文的。
列车的定位过程为:开始列车未定位;列车驶过两个连续的应答器:检测到第一个应答器后根据数据库中的应答器的定义,确认OBCU应答器天线的位置;检测到第二个应答器后就可以确定列车的运行方向及相对于分区方向的列车方向;在应答器之间,通过测速定位,得到连续的位移测量值,对列车的定位信息进行实时更新。列车在运行过程中,由于测速定位中测量误差,可能会导致列车的位移量存在一个不确定值。当列车经过一个应答器时,为了获得更精确的位置,OBCU将重新调整定位参数。定位的误差将再次调整到只有应答器安全检测误差加上应答器安装误差,也就是说因为测速定位导致的误差将被清除。列车的位置参数包括:列车定位状态、前段安全位置、后端安全位置、定位误差值、列车方向、列车运行方向,如图3所示。OBCU_ATP实时监督着列车的定位信息以及误差,基于无线通信与轨旁子系统进行连续地信息交换。WCU_ATP通过确定列车的位置是否安全,发送移动授权给OBCU。
3 TGMT系統测速故障分析
由于线路特点等原因,测速相关故障一直是广州地铁四号线的历史遗留问题。其主要表现是在雨天高架段下,雷达或OPG的测速状态出现问题或出现故障,导致列车的位置不确定性不正常地过快增长,导致列车紧急制动或者冲欠标过大等情况。
位置不确定性(紫色线)从A点开始不正常地增加,至B点(由于该区间过大应答器间隔较长)位置不确定性超过150m,列车发生紧急制动,如图4所示。
通过分析讨论总结了造成该故障的原因有一下两点:
(1)下雨天雷达硬件测速出现问题是起因,DEUTA雷达采用K波段作为雷达的发射波,遇到空气有较大水雾,反射面积水等情况时将对雷达测速产生影响;
(2)软件在检测出测速问题发生后为导向安全,在实际测量值计算出的不确定性并未达到150米时,输出一个偏大值,导致紧制。
4 结语
测速定位相关问题一直是广州地铁四、五号线列车常发的故障。通过对列车测速与定位原理的研究,旨在明确故障的原因,为故障的处理及预防开拓思路。
参考文献
[1]孙林祥,房坚.城市轨道交通的列车定位技术[J].电子工程师,2002,28(7).
[2]陈新,周俊,林必毅.地铁列车定位技术的研究[J].微计算机信息,2009,25(24).
[3]杨英科,李宏,许宝民.雷达测量与应用[D].国防工业出版社,2011.
