基于图像序列的人体运动跟踪算法
2017-05-18石曼曼李玲
石曼曼++李玲

摘 要: 为了提高人体运动的跟踪精度,提出基于图像序列的人体运动跟踪算法。首先对当前人体跟踪算法的研究现状进行分析,指出粒子滤波算法进行人体运动跟踪的不足;然后对粒子滤波算法进行改进,增加了采样粒子多样化,提高非线性人体运动目标跟踪性能,加快人体运动跟踪速度;最后采用仿真实验对人体运动跟踪算法的性能进行测试。实验结果表明,相对于其他人体运动跟踪算法,该算法提高了人体运动跟踪的准确性,而且人体运动跟踪的时间减少,具有更好的稳定性。
关键词: 图像序列; 人体运动; 跟踪算法; 仿真测试; 粒子滤波算法
中图分类号: TN911.73?34; TP391.41 文献标识码: A 文章编号: 1004?373X(2017)09?0025?04
Abstract: A human motion tracking algorithm based on image sequence is proposed to improve the tracking accuracy of human motion tracking. The current research status of the human tracking algorithm is analyzed. The insufficiency of the particle filtering algorithm to human motion tracking is pointed out. The particle filtering algorithm is modified to improve the diversity of the sampling particles and tracking performance of the nonlinear human movement target, and quicken the tracking speed of the human motion. The performance of the human motion tracking algorithm was tested with simulation experiment. The experimental results show that, in comparison with other human motion tracking algorithms, the algorithm has improved the tracking accuracy of human motion, reduced the tracking time of human motion, and has better stability.
Keywords: image sequence; human motion; tracking algorithm; simulation test; particle filtering algorithm
0 引 言
人体运动跟踪是计算机视觉研究的一个重要方面,已广泛应用到如足球机器人、体操训练等领域中[1]。在实际应用中,人体运动跟踪还面临着多种问题,比如噪声干扰、跟踪效率低、跟踪成功率低等,因此如何提高人体运动跟踪仍然是一个具有挑战性的课题[2]。
传统人体运动跟踪方法分为两类:基于跟踪器的人体运动跟踪算法和基于检测器的人体运动跟踪算法[3],其中基于跟踪器的人体运动跟踪算法需要提取人体运动特征,特征主要有质点、轮廓和光流等,该算法假设人体运动目标一直可见,如果人体运动目标消失,则无法实现正常跟踪,缺陷十分明显[4]。基于检测器的人体运动跟踪算法也需要进行局部特征提取,其对每一帧单独进行人体运动检测,需要进行离线学习,很难对人体运动目标进行实时、在线跟踪[5?6]。
为了解决传统算法存在的不足,有学者提出了基于Mean?shift、粒子滤波等人体运动跟踪算法,它们可以较好地实现人体运动跟踪[7]。其中粒子滤波算法作为一种基于贝叶斯估计的非线性滤波算法,能够对样本进行任意分布描述,在人体运动跟踪方面具有独特优势。然而粒子滤波算法存在估计精度低,退化现象严重,对人体运动跟踪结果产生不利影响[8?10]。
为了提高人体运动跟踪精度,提出基于图像序列的人体运动跟踪算法,对粒子滤波算法进行改进,增加采样粒子多样化,实验结果表明,本文算法提高了人体运动跟踪的准确性,而且人体运动跟踪的时间减少。
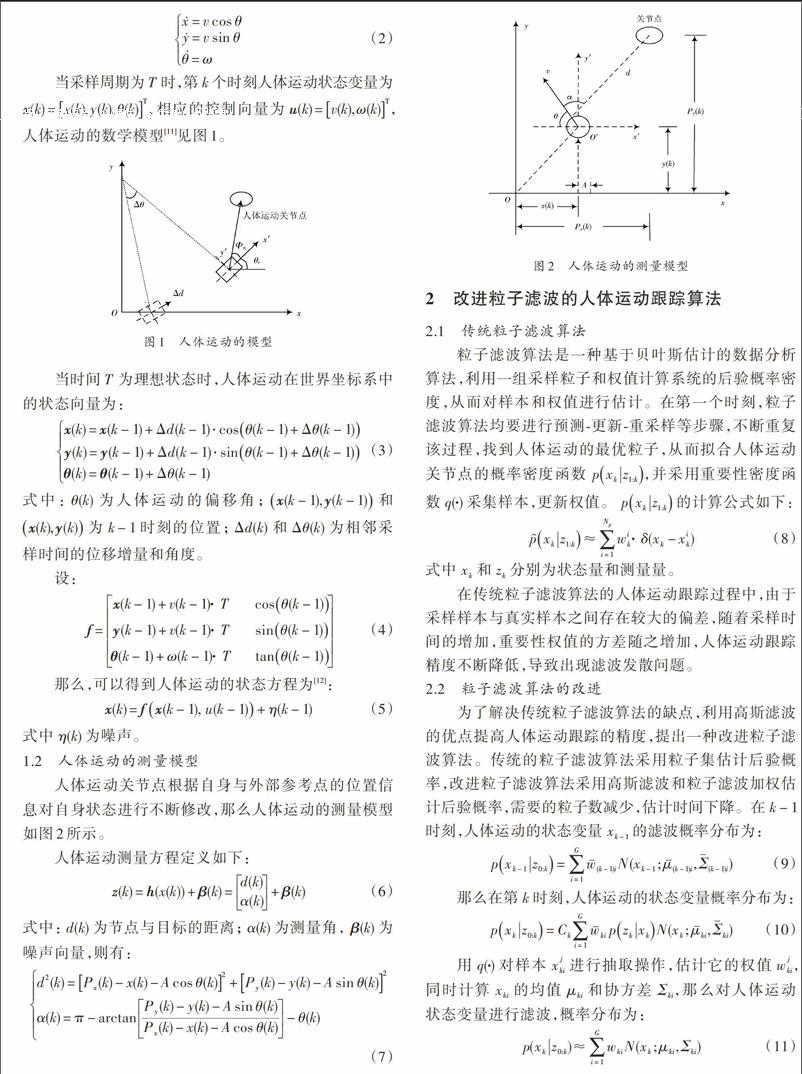
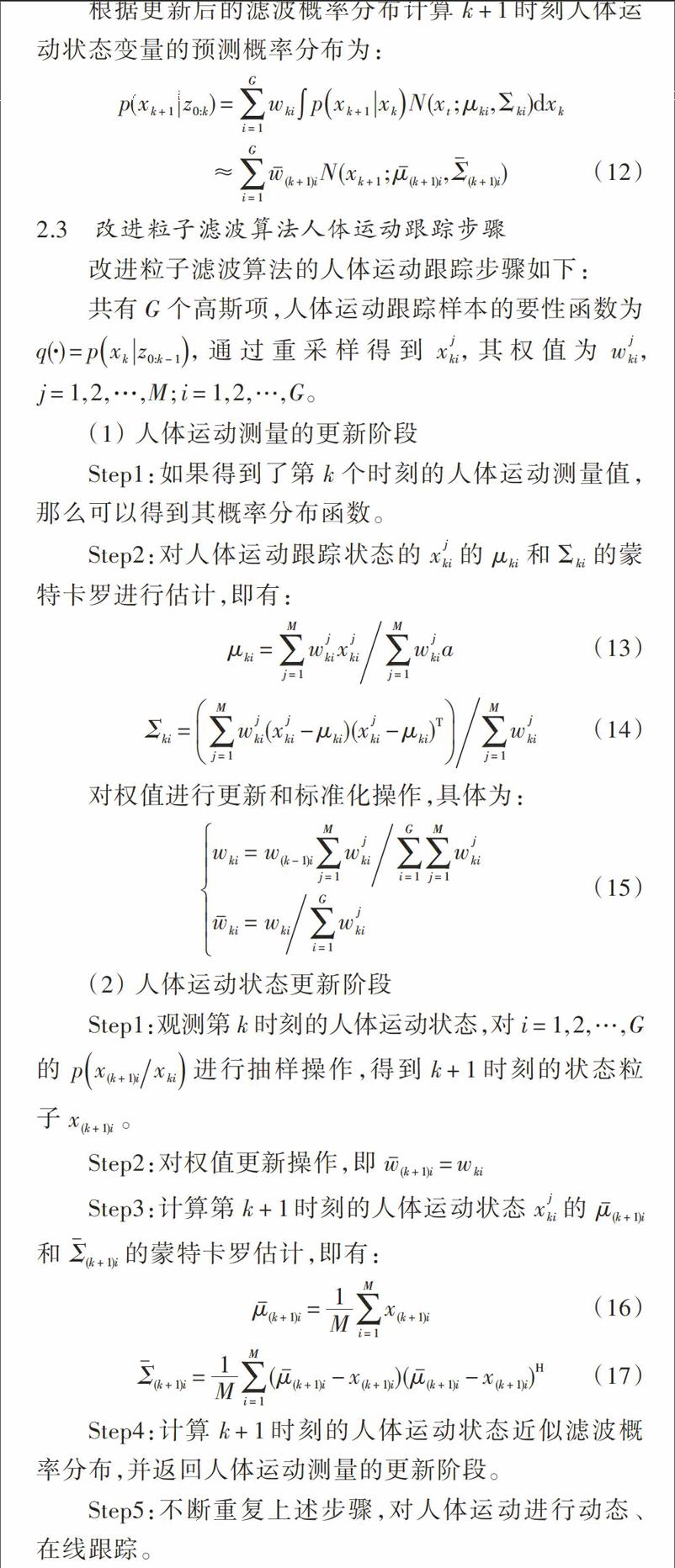
1 人体运动学和测量模型
1.1 人体运动学模型
3 仿真实验
3.1 实验环境
为验证本文提出的人体运动跟踪算法的可行性和有效性,采用Matlab 2012编写人体运动跟踪算法的程序,实验平台为Intel 4 Core 3.2 CPU,4 GB的内存,Windows 8系统,并与传统粒子滤波算法进行对比分析。
3.2 结果与分析
3.2.1 定性分析
采用足球图像序列作为实验对象,分析其跟踪效果,本文算法和对比算法的跟踪结果如图3所示,本文算法用实线框表示,对比算法用虚线框表示。从图3可以看出,对于开始的足球图像序列,两种算法的人体运动跟踪效果相差不大,随着跟踪时间的不断增加,对于后面足球图像序列,对比算法无法准确跟踪到人体运动目标,导致跟踪失败;而本文算法仍然可以对人体运动目标进行准确跟踪,提高了对人体运动目标的跟踪成功率。这是因为本文算法引入了高斯濾波,增加了采样粒子多样化,提高了非线性人体运动目标的跟踪性能,获得了更优的人体运动目标跟踪结果。
对两种算法的人体运动目标的跟踪误差进行统计,实验结果如图4所示。从图4可以发现,随着人体运动目标图像序列的增加,即跟踪时间的延长,对比算法的跟踪误差增加的幅度大;而本文算法的跟踪误差增加幅度缓慢,变化十分平稳,有效提高了人体运动目标跟踪的精度,而且具有更优的稳定性,跟踪效果优势比较明显。
3.2.2 定量分析
采用人体运动跟踪精度和平均跟踪时间对算法的性能进行定量分析,结果见表1。从表1可以看出,本文算法的人体运动跟踪精度要优于对比算法,平均跟踪时间也相应减少,加快了人体运动跟踪的速度,實际应用范围更加广泛。
4 结 语
为了提高人体运动跟踪精度,提出基于图像序列的人体运动跟踪算法,采用改进粒子滤波算法实现人体运动跟踪,提高了人体运动跟踪的稳定性,而且人体运动跟踪效果得以改善,增强了人体运动跟踪的实时性,可以加快人体运动跟踪,具有广泛的应用前景。
参考文献
[1] 蔡荣太,吴元昊,王明佳,等.视频目标跟踪算法综述[J].电视技术,2010(12):135?138.
[2] 李明月,时光煜,温永强.改进的高机动Jerk模型跟踪算法[J].电光与控制,2013,20(5):40?43.
[3] 郝志成,朱明,刘微.复杂背景下目标的快速提取与跟踪[J].吉林大学学报(工学版),2006,36(2):259?263.
[4] ALI A, TERADA K. A general framework for multi?human tracking using Kalman filter and fast mean shift algorithms [C]// Proceedings of 2009 IEEE International Computer Vision Workshops. [S.l.]: IEEE, 2009: 1028?1033.
[5] 宋野,齐志泉,王来生.多示例在线学习方法在遮挡目标跟踪中的应用[J].中南大学学报(自然科学版),2011,42(1):666?671.
[6] 刘望生,李亚安,崔琳.基于当前统计模型的机动目标自适应强跟踪算法[J].系统工程与电子技术,2011,33(9):1937?1940.
[7] 宋康康,陈恳,郭运艳.深度信息辅助的均值漂移目标跟踪算法[J].计算机工程与应用,2013,49(23):177?180.
[8] 杨欣,费树岷,李刚,等.基于复杂特征融合的改进mean shift目标跟踪[J].控制与决策,2014,29(7):1297?1300.
[9] 周鑫,钱秋朦,叶永强,等.改进后的TLD视频目标跟踪方法[J].中国图象图形学报,2013,18(9):1115?1123.
[10] 刘超,惠晶.基于改进CAMShift的运动目标跟踪算法[J].计算机工程与应用,2014,50(11):149?153.
[11] 王保云,范保杰.基于颜色纹理联合特征直方图的自适应Mean shift 跟踪算法[J].南京邮电大学学报(自然科学版), 2013,33(3):18?25.
[12] 高振华,黄山,张洪斌,等.基于自适应背景匹配的运动目标检测算法[J].计算机工程与设计,2013,34(8):2839?2843.
