双车道公路超车危险因素辨识
2017-05-17张文会马俊塔建
张文会,马俊,塔建
(东北林业大学 交通学院,哈尔滨 150040)
双车道公路超车危险因素辨识
张文会,马俊,塔建
(东北林业大学 交通学院,哈尔滨 150040)
为了减少超车风险,建立较为完善的超车模型,本文对超车危险因素进行分析,形成超车因素风险指标体系。应用系统工程的理论对双车道公路超车危险因素进行分析,建立超车过程风险因素5级多层递阶解释模型结构,通过分析双车道公路超车风险因素之间的结构和层级关系,得出结构模型和解释结构模型图,找出影响双车道公路超车的直接因素、间接因素。研究表明,多层递阶ISM方法能有效的建立双车道超车风险因素辨识结构模型,直观的反映出各个影响因素之间的层级关系,操作简便,实际可行。
双车道公路;超车;解释结构模型;风险因素
0 引言
超车是驾驶过程中不可避免的行为,也是最常见的驾驶行为之一。实施超车时,驾驶员需要兼顾当前车速、车辆间距、道路交通设施以及车流状况等信息,综合处理实时调整驾驶策略以完成超车行为。这是一个十分复杂的过程,该过程包括了超车环境信息的收集与处理、超车时机判断、超车轨迹生成以及超车过程突发状况处理等。如此复杂的过程全凭驾驶员自己完成,这使得驾驶员在超车过程中出现错误的概率一直居高不下,而因为超车过程中操作不当所引发的交通事故也是道路交通事故的主要组成部分。因此,如何提高超车过程的安全性成为一个亟待解决的交通安全问题。
对于超车问题国内外学者也做了大量研究。Afshin根据伊朗事故数据统计了超车过程中发生事故的人类工效学特征[1]。Yue Yu建立了智能车辆超车仿真模型,模型中考虑了道路几何特征和风力等交通环境因素[2]。Eleni I分析了年轻男性和女性驾驶人在双车道公路的超车持续时间,同时还建立了考虑司机性别、车速的超车时间模型[3]。刘江通过设计实验方案测量在双车道公路上超车时两车的最小车头时距,即可超车车头时距以及超车过程中需要从对向车道回到本车道时与前车的最小车头时距,即可回头车头时距,研究结果为研究双车道公路通行能力、驾驶员超车行为、设计超车视距以及构建智能交通系统提供实测数据依据[4]。学者在研究超车时大都侧重于超车模型的设计研究,没有专门针对超车过程中的风险因素进行分析,而超车过程的安全因素辨识是研究超车过程的前提,因此对超车危险因素进行分析划分是具有重要意义的。本文对超车过程进行分段,分析每阶段的超车风险因素,并用ISM方法对这些因素进行分层划分,得出影响双车道公路超车安全的直接原因、间接原因,对于以后研究超车安全模型规避超车风险具有重要意义。
1 超车风险因素集
超车过程是一个十分复杂的过程,在分析中不但要考虑超越车辆自身的因素,目标车辆以及对向车辆、对向来车均会对超车过程产生影响,因此,在分析过程中应该进行全面的考虑。在实际的分析过程中,可以将超车过程分为3个阶段[5]:超车准备阶段,超车实施阶段,超车完成阶段。
1.1 超车准备阶段的超车影响因素
驾驶员在驾驶过程中都希望保持自己的期望车速,但由于驾驶员本身年龄、性别的差别,期望车速会有所不同。当期望车速较快的车辆位于期望车速较慢的车辆后方时,就产生了超车需求,超车需求的产生是超车行为发生的前提。但在后方车辆具备超车需求的情况下并不一定会产生超车行为,只有在同时具备超车需求并且满足超车条件的情况下才会产生超车行为。超车条件主要是超车视距是否满足超车需求,而超车视距由超越车的速度,被超车的速度,对向车辆的速度以及天气、能见度等多种因素决定。因此,这些因素都需要被考虑。
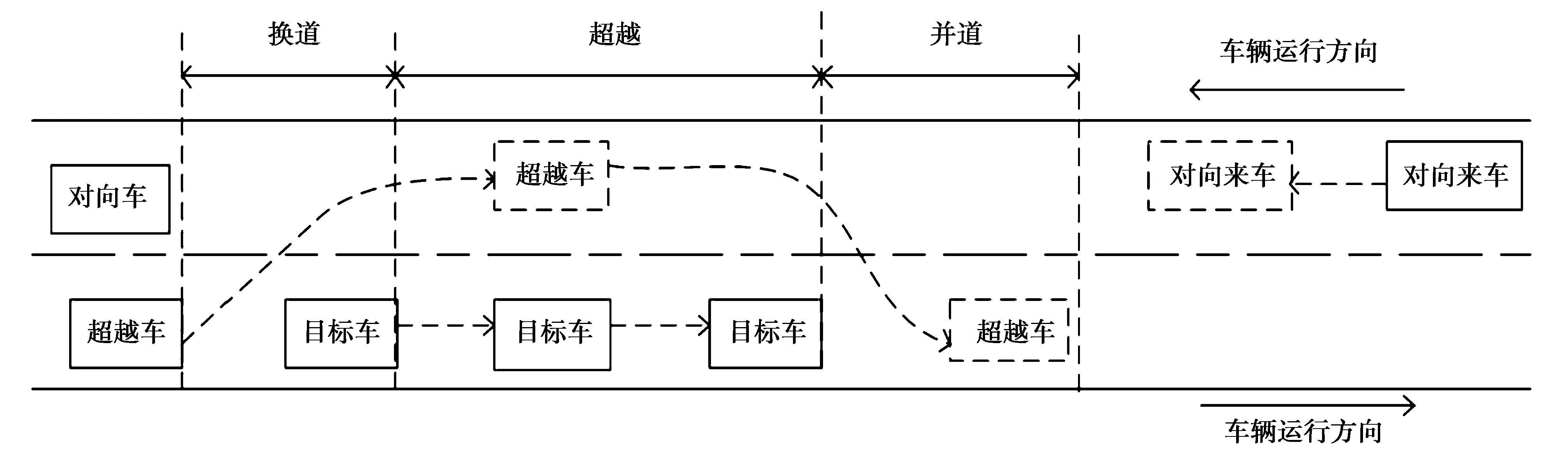
图1 双车道公路超车示意图Fig.1 Schematic diagram of overtaking of two lane highway
1.2 超车实施阶段的超车影响因素
由于双车道公里超车行为的复杂性,即使已经开始实施超车行为也有可能由于各种因素使得驾驶人员放弃超车或者调整超车模式。如图1所示,超车实施阶段又可以分为换道、超越、并道3部分,无论在那一部分,超越车必须保证和目标车辆以及对向来车的距离大于最小安全距离。在换道阶段,根据GIPPS[6]提出的换道模型中的换道最小安全距离公式:
MSS=Max{(∫0t∫0λan(τ)-a(n+1)(τ)dτdλ(Vn(0) -V(n+1)(0))t) ,0}
式中:an,a(n+1)为车辆n,n+1的加速度;Vn,V(n+1)为车辆n,n+1的速度。
如公式中可以看出,在换道阶段,影响超车的主要因素是车辆的加速度和速度,因此在这一阶段主要的超车影响因素是超车车辆的性能以及车速。
1.3 超车完成阶段的超车影响因素
车辆n完成超越回到本车道,处于目标车辆n+1的前面,目标车辆前方车辆n+2的后面,考虑到行驶过程中车辆之间需要保持安全间距,此时影响安全间距的主要因素是前方车辆n+2的车速。
1.4 双车道超车风险因素集
以上按照超车过程详细的对超车准备阶段、超车实施阶段、超车完成阶段对超车过程的风险因素进行了分析。道路交通是一个人车路环境的统一体,在此按照人、车、路、环境这几个方面对超车过程的风险因素集进行总结整理,见表1。
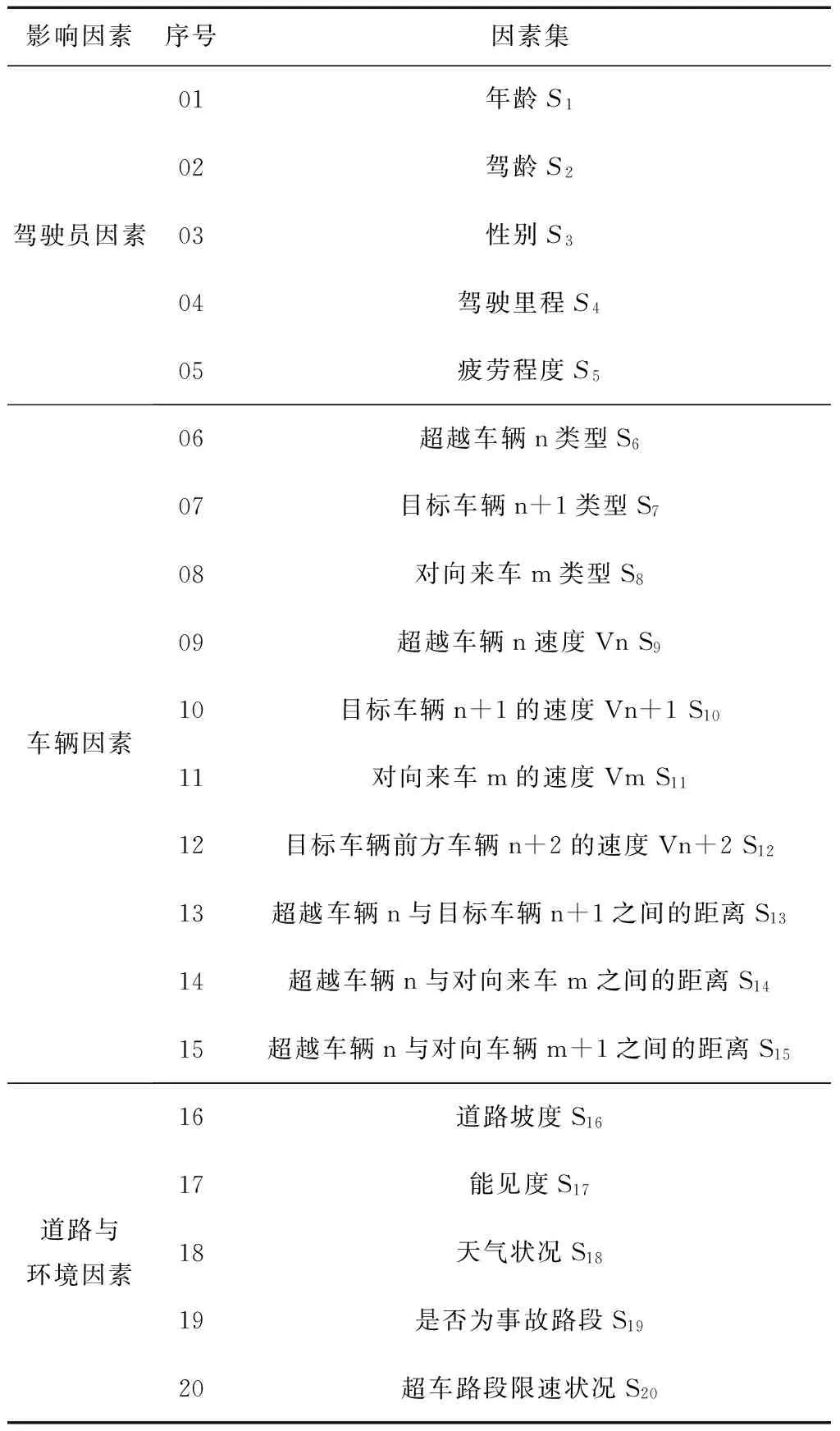
表1 超车风险因素集Tab.1 Overtaking Risk Factors
2 解释结构模型(ISM)因素分析
2.1ISM方法
ISM(InterpretiveStructuralModelingMethod)方法是解释结构模型的简称[7]。ISM方法可以把复杂的系统分解成若干个简单的子系统,通过对系统里各个元素之间相互影响关系的辨识,将原本复杂的系统分解成为若干个递阶结构形式[8]。由于ISM的特性,它可以将原本模糊的思想转化为结构明了、关系清晰的模型[9],因此,在实际研究过程中,ISM常常用于变量众多且变量间关系复杂结构混乱的系统分析。ISM的技术研究步骤[10]如下:
步骤一:提出问题,建立知识模型。采用专家研讨等方法搜集和整理系统的构成要素,得到系统要素集S。记为

(1)
针对讨论的问题设定要素间的二元关系,形成知识模型。
步骤二:判断要素集中两两元素的二元关系,从而构建邻接矩阵A=(aij)MXN。其中邻接矩阵A的元素aij定义为:

(2)
步骤三:根据推移率特性计算可达矩阵R,计算公式为:
(A+1)≠(A+1)2…≠(A+1)k≠(A+1)k+1
(k≤n-1)。
(3)
则M=(A+1)k。
(4)
公式(3)(4)满足布尔代数运算法则[11],其中I为单位矩阵。其运算本质是A加上I后进行自乘,直到某一次幂后前一次乘积与后一次乘积相等就停止计算,而可达矩阵就是这相等乘积的矩阵[12]。
步骤四:主要是对可达矩阵R的应用,采用下述方法分别求得可达集R(Si)、前因集A(Si)和共同集R(Si)∩A(Si),有:
R(Si)={Si|Mij=1;},表示从因素Ni出发,可以到达全部因素的集合,可以通过矩阵M的第i行上数字为1的列对应的因素来求。
A(Si)={Si|Mij=1;},表示可以到达因素Ni的全部因素的集合,可以通过可达矩阵M的第i列上数字为1的行对应的因素来求。
R(Si)∩A(Si)表示R(Si)和A(Si)的交集,也是最高因素集,当R(Si)∩A(Si)= R(Si)时,如其他因素能达到该因素,而该因素不能到达其它因素,则该因素为最高级因素。
步骤五:根据计算结果对可达矩阵进行划分并且建立结构模型,这就包括了区域划分、等级划分以及ISM模型的建立。
步骤六:根据系统工程的理论知识[13]以及双车道超车的实际情况,根据模型对系统要素进行层次分析。
2.2 双车道公路危险因素的ISM模型
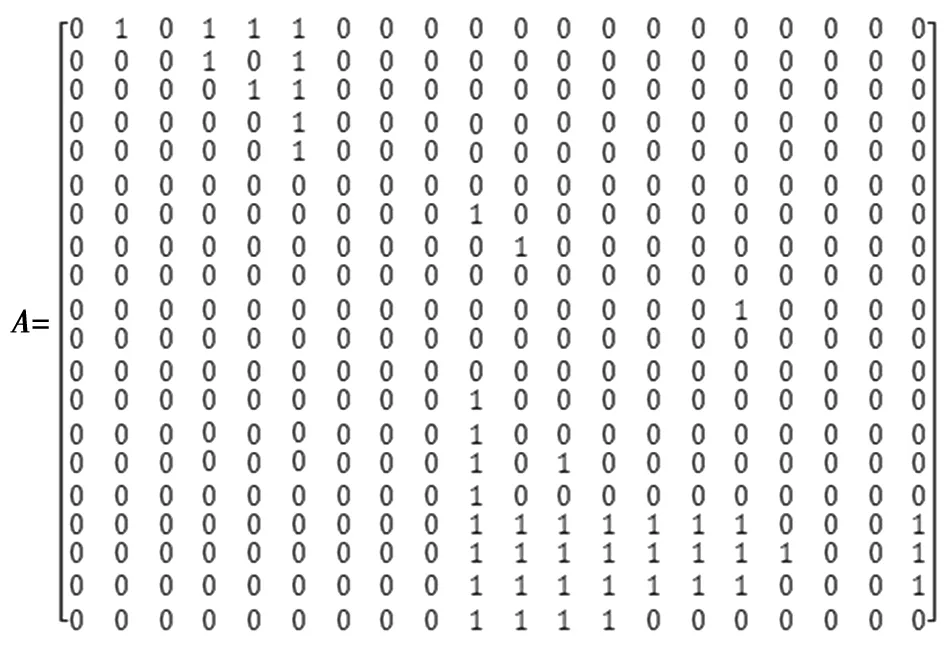
(1)根据表1的超车风险要素集,采用Delphi法确定两两影响因素之间的关系[14],建立双车道公路超车危险因素的直接影响矩阵A,矩阵A 中,1表示行因素对列因素有影响,0表示行因素对列因素无影响或者影响可以忽略不计。邻接矩阵A 如下:
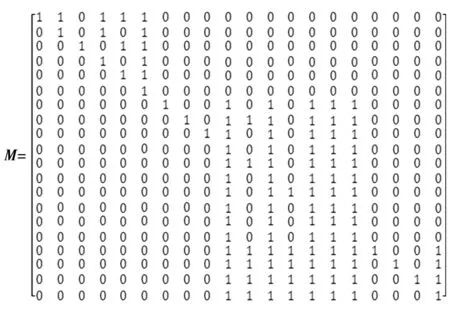
(2)根据公式(2),(3)利用MATLAB编程可计算得出k=4,计算得出可达举证M如下:
(3)对可达矩阵M中各个风险因素进行区域划分[15],并且判断因素间的相互连通影响关系[16]。根据步骤四中的计算方法分别求出可达集R(Si)、先行集A(Si),最后得出最高因素集L1:R(Si)∩A(Si)= R(Si)。根据可达举证M对双车道公路超车风险因素进行划分,通过第一次计算可以获得可达集R(Si)、先行集A(Si)和最高因素集R(Si)∩A(Si)=R(Si),结果见表2。
根据表2通过调整整理可以确定第一级因素集合L1,其中包括S4,S9、S11、S13、S14、S15共6个风险因素;重复上述计算步骤,最终将20个双车道公路超车风险因素分配在5个级别里。由于计算方法相同,且篇幅有限,本文只列出了上述第一级因素集合L1的计算过程,L2、L3、L4、L5采用类似的计算方法,不再累述。最终确定的因素级位划分结果如下:
L1={ S4,S9、S11、S13、S14、S15};
L2={ S2、S16、S5、S6、S7、S8、S10、S12};
L3={ S1、S3、S20};
L4={ S17、S19};
L5={ S18};
因此,双车道公路超车危险因素ISM模型如图2所示。

表2 一级因素划分数据表Tab.2 Division of data for primary factors

图2 ISM结构模型Fig.2 ISM structure model
由图2可知双车道公路超车危险因素具有多层递阶结构的特征[17],共5个层次。第一层级是影响双车道公路超车的直接原因,第二、三、四、五层级对第一层级有直接影响,是影响双车道公路超车安全的间接因。
第一层因素是影响双车道超车安全的直接原因,超车过程能否顺利进行很大程度上都取决于第一层因素,因此这些因素也是在后续超车模型研究中不可忽视的研究因素。
第二、三、四、五层因素是影响双车道公路超车的间接因素,这些因素通过直接因素的影响,也会对超车过程产生一定的影响,只是在超车过程由于影响因素众多,在取舍过程中这些因素可以适当考虑,但不应该作为着重研究对象。
根据上述风险因素辨识提取影响双车道公路超车危险因素最直接的因素,考虑超车过程存在的区域特性、时间特性以及辨识的误差,通过分析和专家意见,最终将驾驶员的驾驶里程、性别、超越车辆n的速度Vn、被超车辆的速度Vn+1、超越车辆n与目标车辆n+1之间的距离、超越车辆n与对向来车m之间的距离6个因素作为双车道公路超车危险因素辨识的主要因素[18]。
3 结论
双车道公路超车需要借用对向车道,因此在超车过程中的安全隐患大于在其它道路条件下得超车过程。本文深入分析双车道公路的超车危险因素,分析各因素之间的关系,建立双车道公路超车危险因素的ISM模型,探讨各个因素之间的结构层次关系。通过分析,得到了一个层次关系清楚、脉络清晰的结构化模型,划分出了影响双车道公路超车安全的间接原因和直接原因。但在本文的研究中也存在一定的不足之处,本文研究侧重于定性研究,在后续的实际模型确定的过程中还需要进一步的进行定量分析,以增加超车模型的精确程度。
[1]Afshin S M,Ali T K,Andishe R.Identifying Driver Characteristics Influencing Overtaking Crashes[J].Traffic Injury Prevention,2010(2):411-416.
[2]刘江通.双车道公路驾驶员超车行为试验研究[J].北京工业大学学报,2013,39(8):1238-1243.
[3]Gipps P G.A Behavioral Car-following Model for Computer Simulation[J].Transportation Research Part B,1981,15(2):105-111.
[4]徐慧智,裴玉龙,程国柱.基于期望运行轨迹的车道变换行为安全性分析[J].中国安全科学学报,2010,20(1):90-95.
[5]Satish C,Shalinee S.Overtaking Behavior on Divided Highways Under Mixed Traffic Conditions[J].Social and Behavioral Sciences,2012,43(43):313-322.
[6]Luigi C,Pier L L,Daniele L.Advanced Overtaking Behaviors for Blocking Opponents in Racing Games Using a Fuzzy Architecture[J].Expert Systems with Applications,2013,40(16):6447-6458.
[7]刘江.山区双车道公路通行能力研究[D].北京:北京工业大学.2006.
[8]Yu Y,Kamel A E,Gong G.Modeling and Simulation of Overtaking Behavior Involving Environment[J].Advances in Engineering Software,2014,67(1):10-21.
[9]王维利,胡江碧.基于超车行为的高速公路车辆侧向间距研究[J].内蒙古公路与运输,2013,8(2):60-62.
[10]Vlahogianni E I.Modeling Duration of Overtaking in two lane highways[J].Transportation Research Part F,2013,20(3):135-146.
[11]游峰,张荣辉,王海玮,等.基于纵向安全距离的超车安全预警模型[J].华南理工大学学报(自然科学版),2013,41(8):87-92.
[12]吴晨,焦渊,张名芳.基于驾驶特性的超车模型研究[J].汽车实用技术,2014,12(8):47-50.
[13]何兆成,孙文博.考虑横向分离与超车期望的车辆跟驰模型[J].物理学报,2013,62(16):168-174.
[14]单晓峰,夏东,王昊.双车道公路超车两难区域研究[J].公路交通科技,2007,24(3):111-114.
[15]朱秀娟,熊坚.机动车驾驶人行为安全的超车模型与仿真[J].江西科学,2010,28(3):381-385.
[16]黄慧琼,覃运梅.考虑驾驶员性格特性的超车模型研究[J].广西师范大学学报,2015,33(1):20-25.
[17]Tang T Q,Huang H.J,Wong S C,et al.A New Overtaking Model and Numerical Tests[J].Physica A Statistical Mechanics & Its Applications,2007,376(1):649-657.
[18]王迎,周燕.基于广义线性模型的高速公路交通事故预测[J].公路工程,2015,40(5):115-119.
The Identification of Overtaking Risk Factors On Two Lane Highways
Zhang Wenhui,Ma Jun,Ta Jian
(School of Traffic,Northeast Forestry University,Harbin 150040)
In order to reduce the risk of overtaking and establish a relatively perfect overtaking model,this paper analyzes the overtaking risk factors and forms a risk factor index system.Based on the system engineering theory,the overtaking risk factors of two-lane highway are analyzed and a five level hierarchical interpretative structural modeling is formed.By analyzing the structure and hierarchy among risk factors,the structure model and interpretative structural model are obtained and the direct and indirect factors that affect the two lane highway overtaking can be achieved.Research shows that the hierarchical ISM can effectively build a two lane highway overtaking risk factors identification model which can reflect the hierarchy among factors directly.The system has the advantages of easy operating and practicality.
Two lane highways;overtaking;interpretative structural modeling;risk factors
2017-03-22
中央高校基本科研业务费专项资金项目(2572015CB13);黑龙江哲学社会科学研究规划项目((4B015)
张文会,博士,副教授。研究方向:交通运输安全。Email:55065469@qq.com
张文会,马俊,塔建.双车道公路超车危险因素辨识[J].森林工程,2017,33(3):89-93.
U 412.3
A
1001-005X(2017)03-0089-05
