移动无线传感网抗干扰定位方法研究
2017-05-17包天悦
包天悦

摘要:无线传感器网络在位置检测、目标跟踪和事件预报等以节点位置信息为基础的应用领域中,需要从理论上解决多源干扰情况下的节点定位问题,提高定位精度、增强定位可靠性,提高传感网的抗干扰能力。本文分析和研究移动传感网抗容错定位求精方法,介绍了在受干扰与节点移动双重作用下参考信息(信标、测距、跳数等)出现偏差而影响定位的问题的常用算法。本文介绍的这些方法对于丰富无线传感器网络基础理论,促进移动无线传感器网络在位置检测、目标跟踪和事件预报等领域的应用,具有重要的科学意义和应用价值。
关键词:无线传感器网络;抗干扰;定位
中图分类号:TP212 文献标识码:A 文章编号:1007-9416(2017)03-0088-02
无线传感器网络对于我省产业信息化和智能化起着非常重要的作用。如:油田管道监测,矿井地下人员跟踪监测,森林或湖泊环境监测,突发性灾害的预警和人员跟踪等。上述应用中,由于受到来自网外和网内其他节点的干扰或攻击,或部分节点失效,导致节点无法定位、定位错误或定位精度无法满足要求。现有的理论与方法不能满足这方面的需求。
1 国内外研究现状
到目前,国内外已有的传感网节点自定位方法,多以节点静态、理想网络为前提,缺乏容错能力。在网络非理想和节点移动情况下,无法实现高精度的容错实时三维定位。对动态、非理想状态下节点定位参考信息的容错辨识能力至今还鲜有研究报道;对动态、受情况干扰下的定位问题,近年来有一些分散的研究,具体分析如下。
1.1 针对节点受干扰或节点移动导致的信标偏差问题
2014年,Prakruthi等人从理论上分析了当恶意信标节点的数量大于或等于实验设定的阈值时,利用启发式算法实现基于测距的节点定位[1]。
2014年,Mitton等人研究了信标节点移动情况下,快速获取最优信标轨道实现准确定位的算法。通过使用辅助传感器来修正移动信标偏差,并利用局部最小生成树方法快速获取信标节点坐标[2]。
2015年,Liu等人提出信标节点动态移动情况下的节点定位策略,基于信标移动过程可修正虚拟引力模型对节点进行定位[3]
1.2 针对节点受干扰或节点移动导致的测距偏差问题
2014年,Diao等人利用移动节点的初始速度和方向等信息参数作为测距偏差补偿,结合未受NLOS影响的测距信息,通过比例计算获取移动节点的坐标[4]。
2014年,Chang等人研究了由于锚节点移动引起的测距偏差情况下的定位问题,并提出一种以信标节点作为辅助的锚导向定位机制[5]。
1.3针对节点受干扰或节点移动导致的跳数偏差问题
2014年,Wan等人将与网络特征参数相关的多跳局部密度、多跳距离跳数等概念引入到传感网多跳定位模型中,在通过约束方环交集获得节点可行区域的基础上,利用轻量级的网格扫描方法搜索多跳定位模型的最优值,这种方法在一定程度上提高了传感网在不规则拓扑条件下的多跳定位性能[6]。
2015年,Hayajneh等人提出一种利用跳数差异创建无线传感器网络安全邻域的方法,建立SECUND(secure neighborhood)协议,并利用路由跳数统计信息的差异来侦测节点的可信度,从而确定安全定位区域的节点和跳数[7]。
2 主要算法介绍
2.1 动态量化移动模型
网络中节点的随机移动路径具有一定的规律性,结合采样区域的估计和移动速度的测量与预测,拟建立一个基于动态量化的粒子群模型。
粒子群模型认为时刻的个体最优位置表示第个节点从开始到现在经历过的最佳位置,由以下公式计算:
其中是适应度函数,代表个节点在时刻在搜索空间的位置。
部分最优位置表示时刻粒子在其领域中发现的最优解位置,如下定义:
2.2 不准确信标位置和测量距离误差分布规律
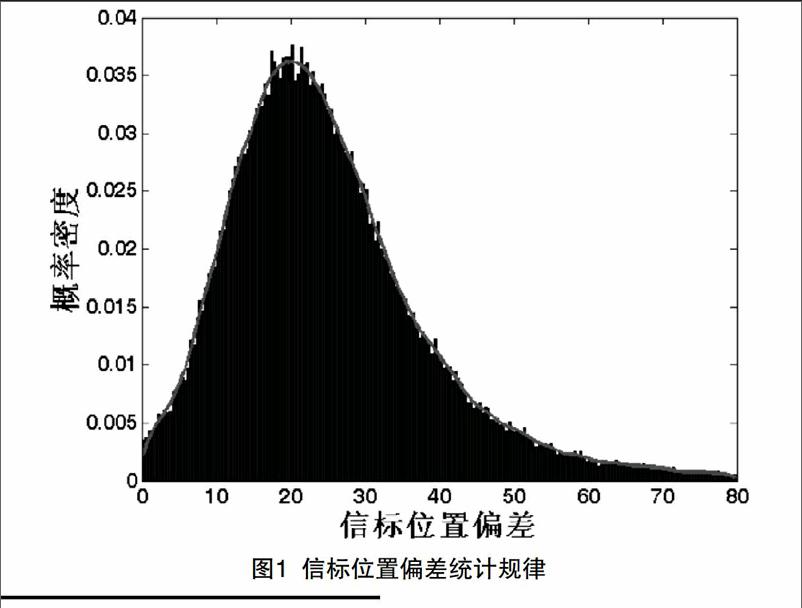
信标节点主要受到定位模块硬件精度和环境高斯白噪声的影响,通过项目组大量的实验分析,其位置偏差呈现正态分布特性,其统计规律如图1所示。距离测量误差分为一跳范围内硬件测距误差和多跳范围内折线累积误差,一跳范围内硬件测距误差主要受到高斯白噪声的影响,多跳范围内折线累积距离误差主要由多跳估计距离与真实距离之间的差值决定,其统计规律服从图2所示。
2.3 信任度量规则
按照多信标参考信息的一致性和约束性,判断信标节点信任级别与不确定程度。多点测距的算术平均可作为信标一致性判断的指标,这里
其中,为某信标节点的参考坐标,为其它信标节点的坐标,为信标数量。
信标一致性判断条件:当时,信标满足一致性;反之,时,信标不一致。这里为信标的一致性判断阈值,它与距离估计误差相关。
2.4 基于量化的无损卡尔曼滤波用于安全定位求精
基于量化的无损卡尔曼滤波通过一系列带有误差的实际量测数据而得到物理参数的最佳估算,它根据前一个估计值和最近一个观测值来估计信号的当前值,无需全部的观测值。通过对数据的实时动态量化,实现在资源约束条件下的实时准确定位。基于量化的无损卡尔曼滤波算法可描述为:
初始化,给定和;
时间更新方程:
量化方程:
测量更新方程:
其中
為量化误差,
为量化误差的协方差阵。
3 结语
上述算法将三维空间中,受干扰情况下移动无线传感网的定位求精问题凝练为多源噪声情况下的参考信息不准确问题,通过对参考信息的分步式处理,实现对移动节点的安全、有效和高精度定位。这些方法对于研究和发展移动传感器网络的抗干扰定位方法的研究起到关键性作用。
参考文献
[1]M. K. Prakruthi, M. Varalatchoumy. Detecting malicious beacon nodes for secure localization in distributed wireless networks. IET Seminar Digest,3rd International Conference on Advances in Recent Technologies in Communication and Computing, ARTCom. 2014, 2014(2): 206-208.
[2]N. Mitton,X.Li,I.Simplot-Ryl,D. Simplot-Ryl. Dynamic beacon mobility scheduling for sensor localization. IEEE Transactions on Parallel and Distributed Systems. 23(8):1439-1452.
[3]K.Z.Liu, W.B.Chen,Z. Zhan, J. F. Zhang and Q. Fu. Beacon dynamic movement strategy in node localization for wireless sensor networks. Jisuanji Yanjiu yu Fazhan/Computer Research and Development.2015,49(11):2494-2500.
[4]Y. S. Diao, F. Yu, D. M. Meng. Structural damage localization based on AR model and BP neural network. Applied Mechanics and Material, Advances in Structural Engineering.2014,94-96:1211-1215.
[5]C.T.Chang,C.Y.Chang, and C. Y. Lin. Anchor-guiding mechanism for beacon-assisted localization in wireless sensor networks. IEEE Sensors Journal, 2014, 12(5): 1098-1111.
[6]J. W Wan.,Guo X.L.,Yu N.,Wu Y.F., and R. J. Feng, Multi-Hop Localization Algorithm Based on Grid-Scanning for Wireless Sensor Networks [J].Sensors.2014,11(4):3908-3938.
[7]T. Hayajneh, P. Krishnamurthy, D. Tipper, A, Le. Secure neighborhood creation in wireless ad hoc networks using hop count discrepancies. Mobile Networks and Applications.2015,3(17):415-430.
[8]孫振兴,赵忖,单立群.基于VB的计算机网络通信的研究与应用[J].电子技术与软件工程, 第15期,20-21页,2013.
[9]赵凤芝,饶平,刘永江.多格式海量数据统一存取的设计与研究[J].科学技术与工程,第11卷,第9期,2003-2006页,2011.
