浅析区管THALES自动化系统升级前后雷达数据处理机制
2017-05-17毛艳华
毛艳华
摘要:本文首先介绍了自2004年投入使用的THALES V6.7.2自动化系统采用雷达前置处理RFP服务器和雷达数据处理RDP服务器完成的雷达马赛克数据处理机制。随后着重研究了目前刚刚升级投入使用的THALES V5自动化系统采用的多探测器航迹处理功能MSTS服务器完成的雷达数据处理机制,并分析了新的雷达数据处理机制的先进性。
关键词:雷达数据处理;雷达前置数据处理;多探测器航迹处理;IMM滤波器
中图分类号:TN957.51 文献标识码:A 文章编号:1007-9416(2017)03-0059-03
北京区管中心使用的主用THALES自动化系统于2003年开始建设安装,于2004年建成投入使用。2008年4月,北京区管THALES自动化主用系统中接入了北京终端区(BTA)、天津空管分局(TCU)自动化系统,三地自动化系统一起共享北京区管THALES自动化系统的飞行数据处理(FDP)功能。北京区管、北京终端区和天津进近THALES自动化系统形成了集成一体化的大系统运行模式。
由于华北区域高空接管空域扩大,雷达引接数量增加和飞行量的不断增加,THALES自动化系统也逐渐出现硬件老化等问题,因此从2011年启动了三大区管的THALES自动化系统的软硬件升级项目。此次软硬件升级项目实际是在不影响目前THALES V6.7.2自动化系统运行的前提下,新建了一套THALES V5自动化系统,THALES V5自动化系统的雷达信号仍从THALES V6.7.2的SPLITER接入。
THALES V5自动化系统和原有的THALES V6.7.2无论从软件上还是硬件上都有很大不同。服务器采用了性能更好的HP380和HP Z420;而从网络结构上,一楼设备机房和二楼管制大厅之间也改为光纤传输,并且二楼的管制大厅的交换机采用了堆叠技术。V5新系统也不再基于UNIX操作系统,而是基于LINUX操作系统,而新旧两套系统的雷达数据处理机制也有很大不同。
1 RDP雷达数据处理
北京区管升级前的THALES V6.7.2自动化系统采用的是雷达马赛克的处理方式,通过RFP和RDP服务器完成原有THALES V6.7.2自动化系统的雷达信号从SPLITER分配器出来,送到uline(前24部)或pline(后8部),将雷达信号进行格式转换后进入雷达子网SUBLINE,通过SUBLINE送给RFP服务器。
1.1 雷达前置数据处理功能(RFP)
北京ACC THALES V6.7.2自动化系统配置了双机冗余的RFP服务器,处理接入系统的32部雷达数据,使用贝叶斯方法和卡尔曼自适应滤波器,通过收到的雷达原始数据,创建并更新系统单雷达航迹数据;完成QNH校正及坐标转换。
RFP服务器获取到单雷达航迹后进行关联处理,检查C模式高度的正确性,并把经处理的单雷达航迹数据发送到多雷达航迹处理RDP服务器。
1.2 雷达数据处理功能(RDP)
北京ACC THALES V6.7.2 自动化系统配置了双机冗余的RDP服务器,处理RFP生成的单雷达航迹数据,使用雷达马赛克算法,基于所选各单雷达航迹权值,融合生成系统航迹数据;处理各种雷达数据告警(包括最低安全高度告警MSAW、短期冲突告警STCA等);處理范围为2600×3000NM,处理系统航迹最大值为1500个。RDP服务器完成如下功能:(1)负责根据就近雷达覆盖组合计算和提供连续的航迹探测从而完成多雷达航迹处理的目的,使用多雷达重叠覆盖的方法确定并显示出航空器在空域中最接近实际目标的位置;(2)负责处理使用特定条件产生的单雷达航迹以显示系统航迹,并根据管制选择,或在多雷达处理的降级模式下仍然可以显示单雷达航迹;(3)负责处理A模式雷达接收机的2位或4位代码,以及C模式雷达接收机的信息,后者被转换并显示出飞行高度或飞行高度层;(4)负责雷达航迹与飞行计划数据的相关,并显示为相应的标牌和航迹符号;(5)负责为EUROCAT-X 2000系统的告警功能提供信息;(6)雷达数据处理功能可以处理A/C模式雷达、S模式雷达报告和ADS-B报告。
RDP服务器可以接收从RFP服务器发来的很多单雷达航迹,对每个单雷达航迹进行分析、过滤,每个单雷达航迹是放在定义的雷达马赛克单元中被选择的。
(1)每个单元:16海里 x 16 海里;
(2)每个单元最多接收5部雷达的数据;
(3)RDP服务器选择该单元中质量最好的航迹,但最多为3个。
2 MSTS雷达数据处理
目前,北京ACC THALES V5自动化系统用双机冗余MSTS服务器替代了原来的RFP和RDP服务器,不再采用雷达马赛克算法生成系统航迹数据,而是采用多探测器跟踪处理功能Multi-Sensor Tracking Function对雷达报告进行计算处理,融合生成系统航迹。
雷达前置处理功能(RADAR-FP)。在THALES V5自动化系统中,不再有RFP服务器,雷达前置处理功能是由MSTS服务器的雷达前置处理功能(RADAR-FP)完成的。
雷达前置处理功能(RADAR-FP)是用来接收和自动处理从近程和远程雷达送来的一次、二次或一二次合成雷达的航迹,点迹或点航迹。这是MSTS的有效组成部分。
雷达前置处理执行以下功能:
(1)雷达数据处理:从不同雷达探测器接收的数据信息有各种不同格式,不同的雷达格式是由雷达制造商决定的。雷达前置处理功能可以对接收到的各种输入格式的雷达信息进行解码处理。
RADAR-FP解码接收和处理来自不同的雷达探测器的航迹、点航迹、点迹数据和气象数据并传送到系统中,这些雷达提供一次、二次或一二次合并数据。
(2)雷达数据发布:雷达前置处理功能将经过处理的雷达数据传送给所有需要雷达数据的EUROCAT-X中的其他功能模块。
(3)气象雷达数据管理:雷达前置处理功能执行坐标转换和计算生成雷达气象数据。
(4)气象雷达数据发布:雷达前置处理功能将经过处理的气象数据处理传送到EUROCAT-X中的其他所需功能模块。
2.1 多探测器航迹处理功能MSTS
MSTS(Multi Sensor Tracking Function)多探测器航迹处理功能,这里的多探测器是指MSTS不仅可以接收和处理来自雷达探测器的点迹和点航迹报告,还可以接收处理来自ADS-B地面站ADS-B报告和来自WAM探测器的WAM报告 ,这种多数据源融合系统航迹的创建保持了真实飞机与监视航迹的一致性;并且减小雷达距离和方位测量偏差。
(1)新一代监视航迹处理系统接收来自多个数据源的数据,包括:1)一、二次雷达数据(传统监视数据);2)S模式雷达数据;3)ADS-B报告数据;4)WAM报告数据。
这些数据通过多探测器跟踪处理功能融合在一起,综合计算出飞机的物理位置,生成系统航迹。融合需要解决以下问题:1)各种来源数据的更新率;2)位置数据的完整性;3)下行相关飞机参数(DAPS)。
(2)多探测器变量更新。多探测器跟踪处理功能使用了一个基于交互多模型(IMM)的卡尔曼滤波器的变量更新技术,它提供了高质量的算法使得多雷达探测器航迹处理的准确性、一致性和响应时间都得到了提高。三个扩展卡尔曼滤波器(EKF)组成多探测器IMM滤波器。
IMM滤波器可以模拟三种模式的转变:1)直线运动与匀速飞行运动(EKF1);2)不断改变飞机运动速度(EKF2);3)恒定的纵向加速度运动(EKF3)。
在探测器更新时, IMM滤波器根据这三个模型计算的飞机轨迹更新使用航迹状态。这个IMM滤波器接受多种数据的探测计算:1)来自于A / C模式、S模式雷达的一次、二次或一二次联合报告的计算;2)ADS-B报告的计算;3)WAM 报告的计算。
这个多探测器变量更新概念是一旦收到任何一个探测器的数据会立即被处理投递(异步或变量更新),使整个飞行过程连续更新。由于处理是连续的,数据依赖更新速度。因为基本报告测量数据和精度(噪音对各类型探测器的报告影响和雷达探测器的偏差)被纳入其中,这就使得多探测器变量更新的结果更加快速和准确。
多探测器初始化功能也是基于这一变量更新技术,为了充分利用多探测器的这一优势。它采用所有探测器的报告进行计算,一起提供一个快速初始化时间。
对于合作航空器,数据由的航空器下传参数(DAPS)提供。ADS-B报告、S模式雷达数据和WAM报告是依靠有S模式雷达技术和ASTERIX标准的机载设备获得。DAP数据也被存储在输出信息中。
2.2 MSTS多探测器航迹处理功能
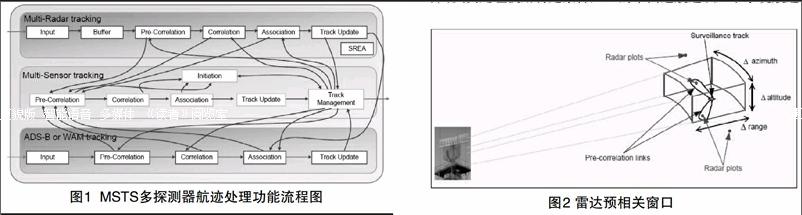
MSTS多探测器航迹处理功能包括Pre-Correlation 预相关功能、Correlation相关功能、Association 关联功能、Track Update航迹更新功能和Initiation 初始化功能。 MSTS多探测器航迹处理功能流程如图1所示。
MSTS对探测器送来的ADS-B报告,WAM报告,雷达点迹和航迹和S模式雷达等用进行预处理。雷达预处理是对在机场、非自动初始化(NAI)和仲裁区域等相关的范围的雷达报告进行检查,雷达预处理功能检查缓冲扇区输入的雷达报告的完整性。雷达预处理是基于IMM滤波器功能,目的是检查系统航迹和雷达报告的一致性
ADS - B预处理专门对接收的ADS - B的报告进行错误检测,检查ADS-B报告的完整性。WAM预处理专门对接收的WAM报告进行完整性检查。DAPs预处理是根据卡尔曼滤波器计算的航迹状态向量检查S模式雷达点迹报告下行数据。
(1)Pre-Correlation 预相关功能。预相关功能使用简单的条件使每个选定的监视航迹可以对应到一组预相关探测报告,并且每个所选探测报告可以对应到的一组预相关监视航迹。如果没有满足预相关的条件,这些设置可能是空的。
预相关功能的目的是为了避免IMM滤波器的无用计算,尽可能使满足条件的探测报告和航迹的关联在一起。
对于雷达报告,预相关的预选取条件是雷达点迹的地理位置坐标和SSR代码兼容性或飞机24位地址兼容性。此功能对于每个选定的监视航迹, 建立一个以航迹为中心的一个volume ,预相关会将在这个volume中的点迹考虑进去,过滤掉探测器送来的无关航迹报告,如图2所示。
注意:雷达预相关功能会考虑在volume(球坐标:D范围,D方位,D海拔)内监视航迹的雷达噪声和协方差矩阵的最大标准的飞机加速能力。
(2)Correlation相关功能。对于雷达报告,相关功能是用来拒绝预关联功能送来的不能用于更新监视航迹的雷达点迹,同时也拒绝监视航迹不能相关的雷达点迹。另外, ADS-B和WAM报告单独处理,这个功能是用来拒绝预相关功能送来的不能相关到这个报告监视航迹。
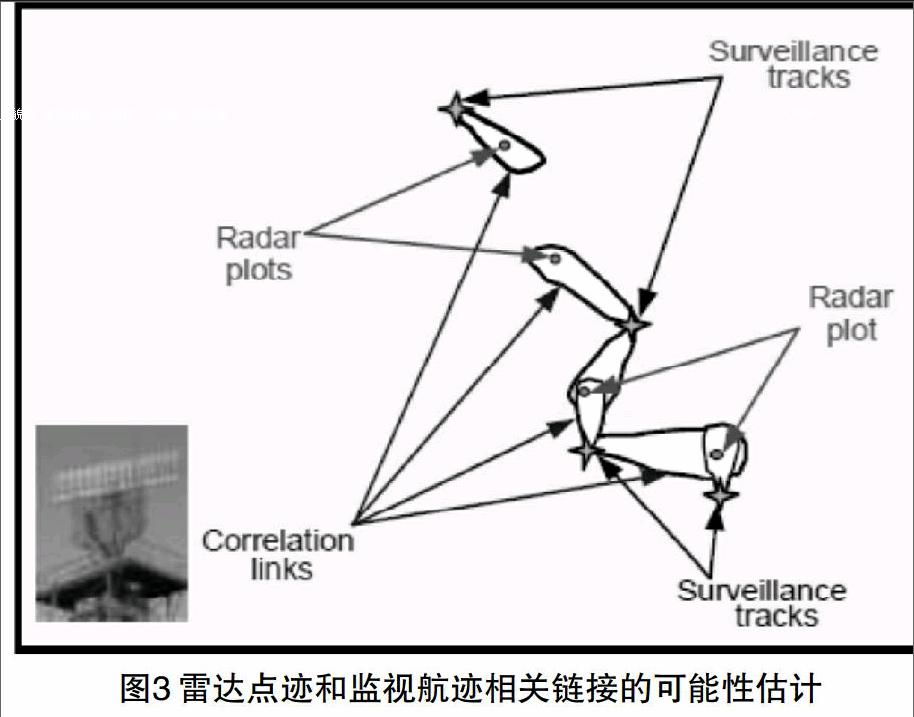
相关功能对于每个可能点迹--航迹进行配对可能性计算。这个值评估监视航迹对应雷达报告的可能性。可能性配对计算根据跟踪预测每个完成预相关点迹时间、用贝叶斯理论和卡尔曼滤波器特性计算距离和3/A模式兼容性(航迹/报告)来完成的,如圖3所示。
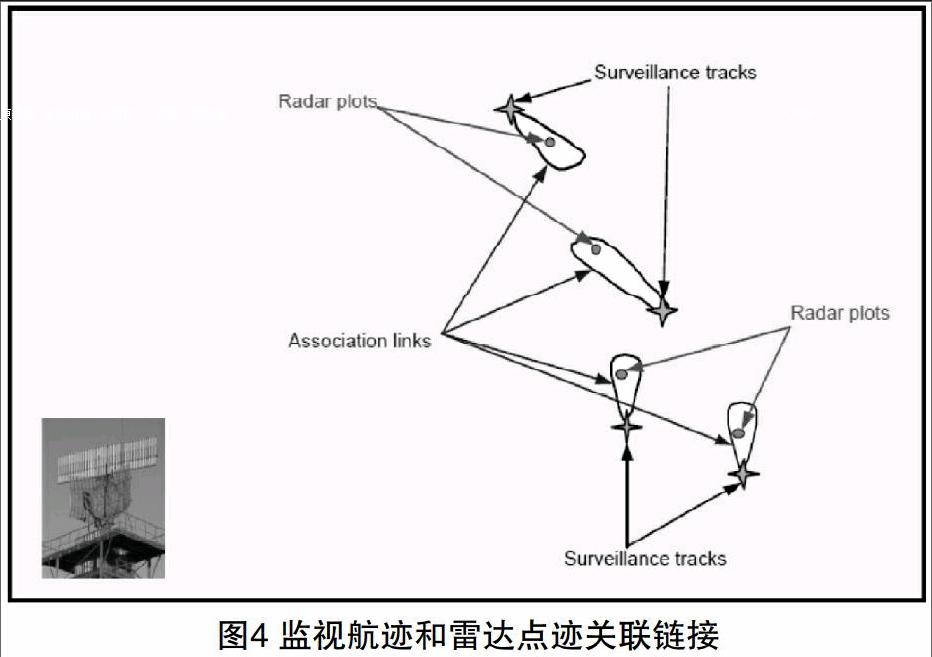
(3)Association 关联功能。对于雷达处理,关联功能是使正确的点迹和正确的航迹相结合,解决相关功能处理后出现的多对一或一对多的相关冲突。例如一个雷达点迹对几个监视航迹和一个航迹对几个雷达点迹,通过关联功能将一个点迹最多与一个监视航迹关联或一个监视航迹最多和一个点迹关联,如图4所示。
对于雷达数据处理,一个点迹与监视航迹关联基于监视航迹和点迹之间的最佳匹配。在关联过程结束时,一些监视航迹可能仍没有一个关联的点迹或者一些点迹可能仍然没有一个相关的监视航迹。如果报告没有和任何航迹关联,它会立即被发送初始化处理。
(4)Track Update航迹更新功能。更新航迹状态是预测航迹状态加上获得修正数据进行数据融合得到的。它采用了多个航迹的平均和多点迹变量更新技术。
航迹更新功能在飞行中一旦收到探测器报告执行航迹更新。减少了更新期间多雷达配置提高了航迹参数判断的准确性。此外, 具有不同类型和品质探测器送来的数据可以被进行相同的处理并按照设定时间间隔定时以广播的方式输出最新的监视航迹报告。
(5)Initiation 初始化功能。多探测器初始化功能是创建和确认初步监视航迹。没有关联监视航迹的探测器报告将被此功能进行初始化处理。多探测器初始化功能的算法与已有相关、关联的航迹算法相同,使用了贝叶斯方法来计算初步监视航迹可能性数值,并确定是否保留或舍弃初步监视航迹。
3 结语
新一代的THALES V5自动化系统的MSTS服务器和THALES V6.7.2系统的RDP服务器不论是在硬件性能上还是在软件功能划分上都有了很大的变化,MSTS不再负责原来RDP负责的飞行计划相关和各种告警功能计算,此功能由SNMAP完成。MSTS不但能处理传统的一、二次雷达报告,还能处理ADS-B、WAM和S模式雷达报告,由于目前北京ACC使用的自动化系统并没有引接ADS-B和WAM,所以本文重点介绍了MSTS对雷达报告的处理。
MSTS利用变量更新技术,通过初始化、预相关、相关、关联环节,选取从各个雷达探测器送来的关于同一飞行器的轨迹中最好的与监视航迹关联生成系统航迹,并排除掉影响雷達航迹的其他不好的雷达轨迹。这种雷达信号处理方法比RDP的雷达马赛克法生成的系统航迹更加快速准确,降低了质量不好的雷达信号对系统航迹的影响,减少了因某部雷达的假信号和丢信号等情况造成系统航迹出现假信号和信号分裂的几率,大大提升了系统的稳定性。
参考文献
[1]NESACC EUROCAT-X System/Segment Specification [J]. Thales,Revision: A 10 December 2015.
