基于肌电信号识别的无线智能控制系统
2017-05-16邢路宽梁恒诺王秉琪
邢路宽+梁恒诺+王秉琪

摘 要:文中设计了一款基于肌电信号识别的无线智能控制系统,可有效将人体生物电信号作为信号源,通过无线传输并识别后,转化为机器可识别的控制信号,具有使用方便,易于维修等特点,可大大提高人们生活的舒适指数,具有广阔的应用前景。
关键词:肌电信号;无线;智能
0 引 言
无线肌电智能控制系统设计受到当下流行的智能硬件启发。将人体生物电信号作为信号源,通过无线传输并识别后,转化为机器可识别的控制信号。
整体控制方式根据人体不同动作控制,更加贴合人体本身的自然反应,相比市场上传统的控制方式,让人与环境交流更加简单自然;对于前臂部分完好的残疾人,也可以正常使用,无需添加辅助设备,可以作为很好的康复医疗器械使用,广泛适用于各类不同人群,相应的市场潜力大;受控制物品不需复杂改造,整体系统建立方便、简单,易于维修,使用人员不需要提前培训就可直接使用,使人体能够更加直观的控制周围的电器。
通过与生活中各种电器的配合,建立一套完整的无线肌电控制系统,可大大提高人们生活的舒适指数。
1 工作原理
通过4个通道对5个动作进行前臂肌电表面信号采集,然后进行预处理。每个通道选取8个时域参数作为EMG信号的特征参数,分别为平均绝对值、平均斜率绝对值、威尔逊幅值、方差、过零率、符号改变斜率、波长和均方根,通过DAG-SVM方法对样本进行分类,分类识别后得到相应动作,根据动作协议通过无线传输控制指令。传输至电脑后,则进入电脑界面端控制识别指令。智能小车的整体系统设计结构主要划分为四层,分别为前臂表面肌电信号感知层,肌电信号分析层,智能小车运动控制层,小车硬件层(硬件支撑)。系统原理图如图1所示,测试示意图如图2所示。
(1)前臂表面肌电信号感知层:选择人体右前臂表面4个位置,在完成6个动作时将发出的表面肌电信号收集并保存。
(2)肌电信号分析层:将所获取的肌电信号转入Matlab数学矩阵分析软件进行分析。通过预处理,滤除噪声,提取特征值后进行分类识别,后将分类识别的结果通过无线模块传输发送给智能小车的主控芯片。
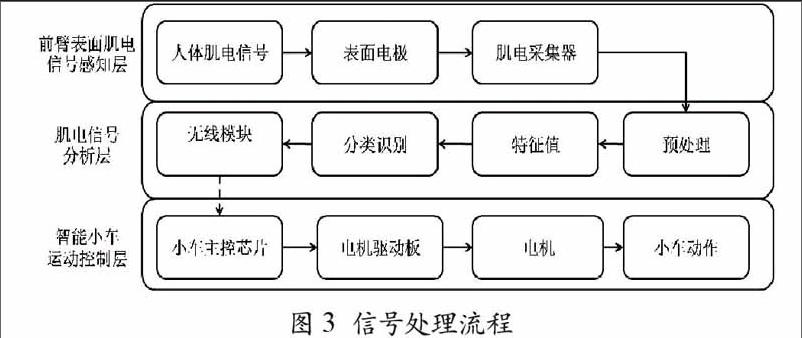
(3)智能小车控制层:小车主控芯片收到肌电信号分析层所得出的分类识别结果后,按照提前制定的通讯协议执行指令,之后对电机驱动板输出控制电平,最终让电机驱动板驱动电机运动,带动小车完成动作。信号处理流程如图3所示。
2 创新点
通过研究肌电信号,利用分类器加以区分,控制小车及其生活中的电器,省去了传统复杂的控制方式,将简单的生物动作与简单的控制理论相联系,操作控制方式简单快捷,可以广泛推广,并通过广泛收集数据,将此类控制方法的可靠性大大提升。本项目以生物动作做为信号源控制小车动作,构建了一种新的控制模式,并且是国内外前沿科学问题,尚未有成熟的研究经验与成果,创新性强;肌电信号研究在生物工程学,临床医学,恢复医学方面都有極大的研究应用与潜在价值,具有巨大的研究潜力与研究价值。
3 市场前景
在改革开放之后,随着人们的生活水平不断提高,对生活舒适度的要求越来越高。大量的市场需求使中国的科技行业迅猛崛起,科技行业总产值和销售额都增长迅速。现在国内的科技市场已能够为人们提供大量的手机,电脑,在数量上满足人们的需求。但并不能从根本上满足对人们生活舒适度的追求。本作品以肌电控制方法为核心技术,与传统型控制方式相比,能用人体对生活中常用电器的进行控制,更加适合生活中使用,让人们生活更加舒适便捷,市场前景良好。
