基于ADAMS车辆随机振动的模拟仿真研究
2017-05-13彭永旗
彭永旗
(长安大学汽车学院,陕西 西安 710064 )
基于ADAMS车辆随机振动的模拟仿真研究
彭永旗
(长安大学汽车学院,陕西 西安 710064 )
论文以某轿车为研究对象,基于机械系统动力学仿真软件ADAMS/CAR建立包括前后悬架子系统、转向子系统和前后轮胎子系统的车辆整车模型。运用ADAMS/CAR路面建模器建立B级随机路面模型,通过ADAMS/CAR/Ride对整车模型在所建立的随机路面上进行模拟仿真研究,以底盘的加权加速加速度均方根为评价指标,对其进行平顺性评价。
随机振动;仿真;平顺性;ADAMS
CLC NO.:U462.2 Document Code: A Article ID: 1671-7988 (2017)08-93-03
引言
随着经济的发展,人们的生活水平也越来越好,汽车也逐渐走进了千家万户,人们从刚开始对车要求具有良好的动力性和经济性逐渐开始注重车的舒适性,因此,汽车的车辆系统动力学性能越来越值得深入的研究[1]。汽车的平顺性主要是来自路面的随机振动激励的响应,也叫做乘坐舒适性[2]。因此,如何得到一个好的整车模型和真是的随机振动路面模型城为了车辆平顺性评价的关键。
随着计算机技术的迅猛发展,虚拟样机技术也随之发展开来。ADAMS集建模、仿真、运算和分析的机械系统仿真软件,自开发以来,其在汽车、机械和航空领域得到广泛应用。本论文以某小型轿车为研究对象,基于机械系统动力学仿真软件ADAMS/CAR建立包括前后悬架子系统、转向子系统和前后轮胎子系统的车辆整车模型。运用ADAMS/CAR路面建模器建立B级随机路面模型,通过ADAMS/CAR/Ride对整车模型在所建立的随机路面上进行模拟仿真研究,以底盘处的加权加速加速度均方根为评价指标,对其进行平顺性评价。
1、 整车仿真模型的建立
汽车是一个由成千上万的零部件组装而成,结构复杂。本论文根据随机振动的平顺性要求,对其进行简化模型,得到了一个包含前后悬架子系统、转向子系统和前后轮胎子系统的车辆整车模型。
1.1 前悬架模型的建立
在ADAMS/Car中的Template Builder下建立前悬架子系统.根据车企提供的整车参数得到前悬架的硬点、几何体、减震器、弹簧、橡胶衬套等参数。前悬架采用双横臂独立式悬架模型如图1所示。主要包括减震器,两个下横臂、两个上横臂,转向节和转向横拉杆等。其中,减震器与车身用万向节铰相连;下摆臂与车身用球铰相连;转向横拉杆一端与转向齿条通过万向节铰相连,另一端与转向节总成通过球铰相连[3]。

图1 前悬架模型
1.2 后悬架模型的建立
根据前悬架建模的方法同样得到后悬架模型,如图2所示;

图2 后悬架模型
1.3 转向子系统模型的建立
在ADAMS/Car中的Template Builder下建立包括方向盘、转向轴、转动万向节、转向传动轴、转向器等零部件的转向子系统。建立方向盘与转向轴之间的旋转铰链、转向轴和横拉杆之间的铰链、建立横拉杆和转向节之间的铰链等等。得到如图3的转向子系统模型:

图3 转向子系统
1.4 车身和轮胎的建立
由于车身系统模型的创建非常繁琐,即便建出的模型也不能应用于仿真,故将车身系统简化为一个全部质量集中于质心位置的刚体。利用ADAMS 中自带车身模版,修改刚体质心坐标、代入质量和转动惯量等参数,即可得到所需动力学车身模型。
轮胎采用自带模板的轮胎模型,修改轮心坐标、带入质量,设置为FIALA轮胎。
1.5 整车模型的装配和建立
将前面所得模板在ADAMS/CAR里装配成各子系统,得到前后悬架子系统、转向子系统、车身子系统和轮胎子系统。然后在ADAMS/CAR里将各子系统装配成整车模型并选择整车试验台选择四柱试验台即ARIDE_FOUR_POST_ TESTRIG。从而得到整车仿真模型如图4。

图4 整车仿真模型
2、随机路面的建立
因为本论文选择采用Ride来评价车辆的随机振动的平顺性,则随机路面的建立是利用CAR里面的路面建模器来建立路面模型。选择符合要求的B级路面,即空间功率谱密度Ge=0.1、速度功率谱密度Gs=20、加速度功率谱密度Ga=0.1得到随机路面仿真模型[4]如图5所示:
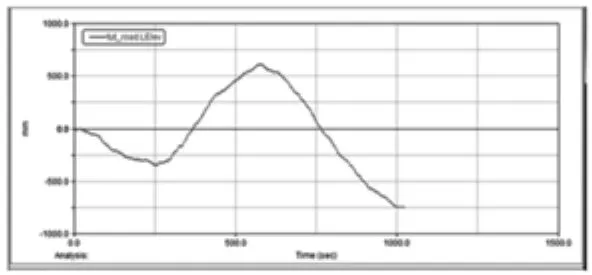
图5 随机路面的路面轮廓
3、基于ADAMS的整车随机路面的仿真
根据GB/T4970— 1996《汽车平顺性随机输入行驶试验方法》[5],分别在B,C级随机路面下对汽车进行平顺性仿真,随机路面下,以车速分别为60,80,100/100km/h通过此路面。利用ADAMS Post Processor后处理功能得到车身各轴向加速度时间历程,图5为随机路面60km/h时汽车的横向加速度时间历程曲线。通过快速傅立叶变换FFT得到加速度功率谱曲线。然后经过后处理模块的一系列计算得到各轴向的加权加速度均方根awx、awy、awz的值.。最后通过加权加速度均方根公式aw=[(1.4awx)2+(1.4awy)2+awz2]1/2求的车辆在60Km/ h的加权加速度均方根的值aw。
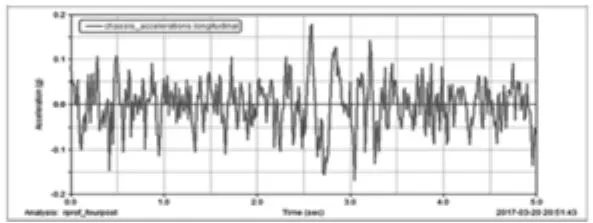
图6 60Km/h的地盘加速度曲线

图7 60Km/h的地盘加速度功率谱曲线
同样在80、100和120Km/h时采取同样方法可得到该速度下的加权加速度均方根值。
通过计算得到各种速度下的加权加速度分别为0.305、0.536、0.785、0.905。根据平顺性评价标准文献[1]得到结果:车速在60Km/h车辆平顺性较好,车速80Km/h有一些不舒服,车速在100Km/h和120Km/h时相当不舒服。
4、结论
(1)通过整车仿真结果和平顺性评价指标的仿真结果与实车试验结果对比,可以得知整车模型的建立是正确的。仿真结果与实车测量的差距可能由于该模型对实车模型做了一些简化的原因。另外,仿真用的道路与实际道路有些误差,但是在误差范围内。
(2)根据平顺性评价标准得到结果表明,车速在100Km /h和120Km/h时相当不舒服,说明目标车辆的平顺性不好,可以通过调节悬架的弹簧阻尼来解决。
[1] 李成,张万枝,潘旭,铁瑛.基于ADAMS的汽车平顺性建模与仿真分析[J].郑州大学学报(工学版),2010, 31(5):99-102.
[2] 余志生.汽车理论[M].4版.北京:机械工业出版社,2007:206- 207.
[3] 隗寒冰,邓楚南,何文波.基于ADAMS软件的汽车平顺性仿真分析[J].机械设计与制造,2006(7):75-76.
[4] 陈军.MSC.ADAMS技术与工程分析实例[M].北京:中国水利水电出版社,2008:285-286.
[5] 长春汽车研究所.GB/T 4970— 1996汽车平顺性随机输入行驶实验方法[S].北京:中国标准出版社,1996:197- 203.
Simulation and analysis of Vehicle under random vibration input
Peng Yongqi
( University of changan automobile institute, Shaanxi Xi 'an 710064 )
This paper takes a car as the research object. The multi-body dynamic model of a commercial vehicle is established in which suspensions tires and the vehicle body the steering system are considered. Through the road-builder of the software ADAMS/CAR establish the B random vibration ride and simulation the model through the ADAMS/ CAR/Ride in this B random vibration road. Based on the weighted acceleration root mean square value of the chassis, the ride comfort evaluation is carried out.
random vibration; simulation; ride comfort; ADAMS
U462.2
A
1671-7988 (2017)08-93-03
彭永旗,就读于长安大学。
10.16638/j.cnki.1671-7988.2017.08.032
