膝关节康复外骨骼构型综合与结构设计
2017-05-10李剑锋黄相强陶春静王飒季润
李剑锋, 黄相强, 陶春静, 王飒, 季润
(1.北京工业大学 机械工程与应用电子技术学院,北京 100124; 2.国家康复辅具研究中心,北京 100176)
膝关节康复外骨骼构型综合与结构设计
李剑锋1, 黄相强1, 陶春静2, 王飒1, 季润2
(1.北京工业大学 机械工程与应用电子技术学院,北京 100124; 2.国家康复辅具研究中心,北京 100176)
为了探讨膝关节自适应性康复外骨骼机构构型综合与结构设计问题,本文基于人体膝关节屈伸运动实验采集的数据,提取出膝关节运动瞬时螺旋参数;根据膝关节生理结构和膝关节螺旋轴的瞬变特性考究,建立人体膝关节的运动学模型。结合人-机运动相容性、人-机闭链自由度和人-机约束力矩作用性质分析,提出一种与人体膝关节运动相容的康复外骨骼机构构型;考虑结构简单性和穿戴舒适性,对膝关节康复外骨骼装置进行了结构设计,获得了一套可自适应人体膝关节转动轴线运动特性的膝关节康复外骨骼机构。
膝关节康复;自适应;螺旋轴;运动相容;人-机闭链;构型综合;结构设计;外骨骼
穿戴型膝关节康复外骨骼是典型的人-机一体化系统,康复训练过程中人-机之间通过连接部位的相互作用实现协同运动。因此,要求人-机连接界面不能出现过强的约束力/力矩以避免由此导致的舒适性变差和二次损伤。由文献检索对膝关节康复外骨骼的设计特征可以看出,外骨骼机构的设计主要基于人体膝关节的运动学仿生。因此,人体膝关节运动学模型对于膝关节康复外骨骼设计具有重要意义。目前已提出的人体膝关节运动学模型主要有三种:1)膝关节运动学模型可简化为一个轴线垂直于矢状面且位置固定的转动副[1];2)膝关节运动学模型可视为一个瞬心在矢状面内连续变化的变轴线转动副[2];3)膝关节运动学模型是一个轴线位置和姿态随关节转角在空间内瞬时变化的“松弛关节”[3-5]。在现有的外骨骼构型设计中,通常把膝关节运动学模型简化为一个转动轴线垂直于矢状面,位置固定或不定的转动副[6-7]。例如,具有代表性的康复外骨骼SERKA[6]把膝关节简化为一个轴线固定的转动副。而文献[8]借鉴第二种膝关节运动学模型,把膝关节等效为矢状面内的一个凸轮机构,为更接近膝关节的运动学特性,外骨骼机构还增加了移动和转动两个被动自由度。Celebi等分别提出了一个由3个主动转动副组成的虚拟关节模型和一种主动膝关节康复外骨骼,可实现矢状面内的一个转动自由度和二个移动自由度,从而保证机构主动关节轴线与膝关节轴线在矢状面内自对齐[7]。现有机构设计的优点是借鉴了人体膝关节骨骼的运动结构特征,可以获得形式简约的机构构型。然而,上述康复机构只能保证外骨骼关节轴线与膝关节轴线在矢状面内对齐,均未考虑膝关节轴线在其他平面的位姿变化,在康复训练过程中仍存在着因关节轴线不能完全对齐导致的运动不相容和舒适性变差的现象。现有文献中较少涉及膝关节螺旋轴的分析,尽管有研究者注意到膝关节螺旋轴的位姿随着膝关节屈伸运动不断变化,但均未从外骨骼机构设计的角度探讨改善外骨骼主动关节轴线与膝关节转动轴线在运动过程中完全对齐的方法和途径。
本文将结合人体膝关节螺旋轴的瞬变特性分析、人体膝关节运动学模型的建立、人-机闭链自由度分析等方面,研究人-机运动相容性好的膝关节康复外骨骼机构构型设计问题。通过在外骨骼主动关节与人体连接环节之间添加被动自由度,以改善膝关节外骨骼机构的人-机运动相容性。考虑结构简单性和穿戴舒适性,对膝关节康复外骨骼装置进行结构设计。
1 膝关节运动学模型的建立
1.1 数据的采集
1.1.1 实验对象
健康成年男性1名,年龄24岁,身高180 cm,体重85 kg,腿长970 mm,无神经及心肺疾患,且无肌肉、骨骼疾患等疾病。实验前,向受试者解释本次实验的目的和步骤,采取自愿参加的形式。
1.1.2 实验方法
实验采用加拿大NDI OPTOTRAK光学运动捕捉系统进行数据采集,该系统通过摄像设备捕捉运动物体上的标志点,并在自身坐标系下记录各标志点的位置坐标,以此来获得物体的运动轨迹。在实验前,在受试者的大腿和小腿上各安置4个标志点,为了减小皮肤组织对标志点坐标采集精度的影响,实验安排受试者坐在椅子上完成整个膝关节屈伸运动。为保证受试者大腿不产生移动,采用胶带将受试者大腿和座椅固定在一起。在自然步态下,人体膝关节在矢状面内最大屈曲角度为60°左右,为了分析的一致性,实验采集受试者小腿相对于大腿从完全伸直到屈曲65°过程中的标志点坐标。标志点和安放位置如图1和图2所示。实验过程中,受试者首先连续完成5次膝关节屈伸实验,待数据稳定后,采集1组膝关节屈伸实验数据。该组数据包括15个屈伸角度的标志点坐标。大腿标志点坐标和小腿标志点坐标分别如表1和表2所示。(表中只列出前2个屈伸角度的标志点位置坐标,受篇幅所限其他坐标省略)。

(a)大腿 (b)小腿图1 大腿和小腿标志点Fig. 1 The makers of thigh and tibia

图2 标志点的位置Fig. 2 The location of the markers

mm

表2 小腿标志点坐标
1.2 螺旋参数的计算方法
螺旋运动描述了两个刚体或同一物体上两个不同位置在全局参考系里的相对运动。在本文中应用螺旋运动参数来描述小腿相对于大腿的瞬时运动。一个自由刚体的螺旋运动可以被描述成刚体沿着某一固定轴线A移动一定距离d和绕着该轴线A转动一定角度φ的运动合成,如图3所示。设螺旋的节距(pitch)为q、螺旋轴为A,轴线A可由Plücker线坐标表示。
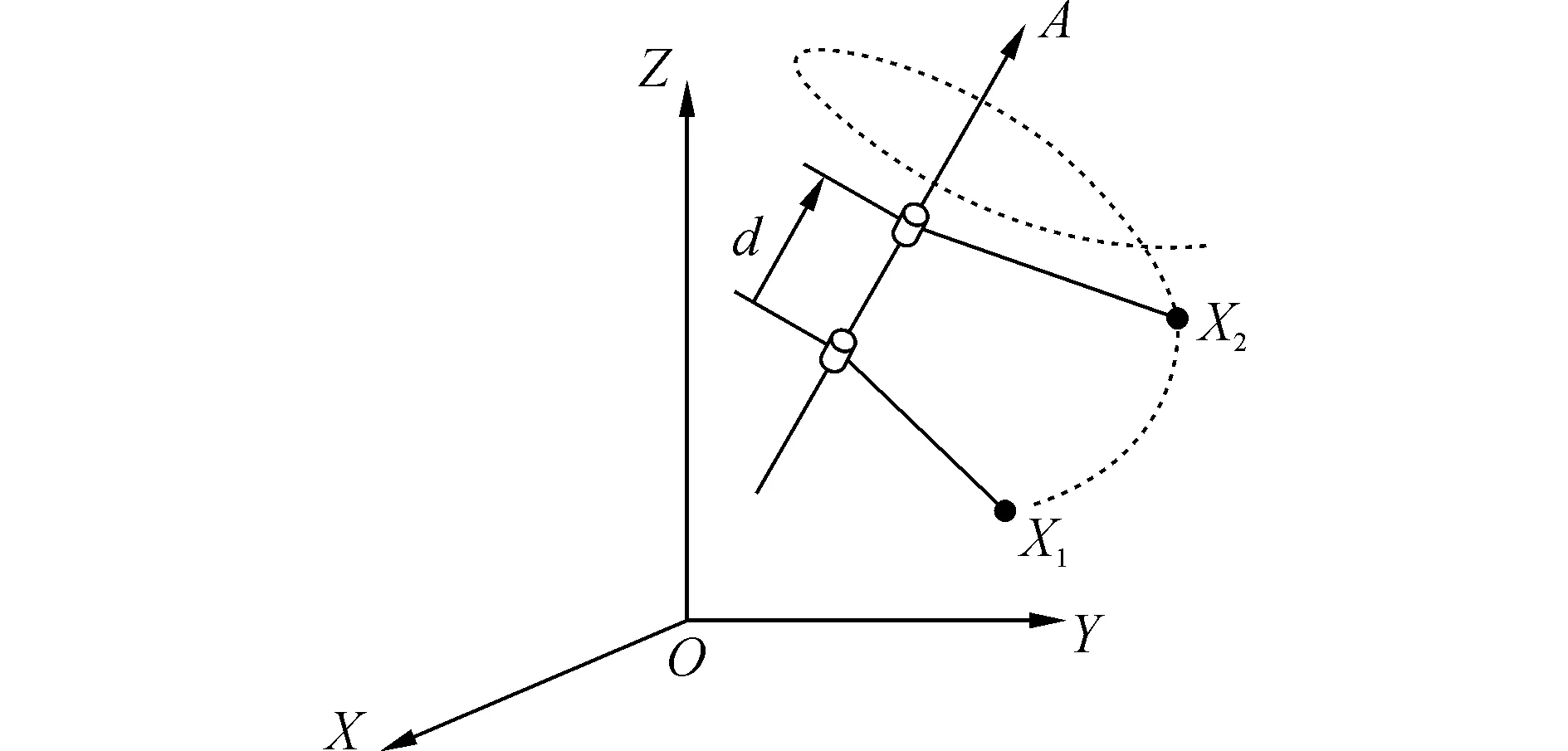
图3 螺旋运动Fig. 3 Screw motion

(1)
式中:s是一个沿着螺旋轴方向的单位矢量,r0是螺旋轴上一点的位置矢量,q是节距。
1.3 点簇技术和螺旋参数的计算
对采集的15个屈伸角度对应的标志点坐标应用点簇技术(point cluster technology)算法[9]计算描述物体运动的齐次转换矩阵。然后,根据Davidson和Hunt提出的算法,从齐次变换矩阵中提取出描述膝关节瞬时运动的螺旋参数[10]。
1.3.1 点簇技术算法
1) 在运动的物体上放置一组标志点(n>3),在
任意转角t,在全局坐标系中,表示标志点的坐标:
G(t)i=[g(t)ixg(t)iyg(t)iz]T,i=1,2,…,n
(4)
2) 为每一个点G(t)任意分配一个质量m(t),作为权重系数,计算这些点的质心C(t):
(5)
3) 在任意转角t,G(t)i在全局坐标系下的坐标可以表示为
G(t)i=C(t)+R(t)·L(t)i,i=1,2,…,n
(6)
式中:R(t)为局部坐标系与全局坐标系之间的方向余弦矩阵,L(t)i表示在局部坐标系下标志点i的坐标。
4) 在局部坐标系下,标志点i的坐标L(t)i为
L(t)i=RT(t)·(G(t)i-C(t))
(7)
5) 方向余弦矩阵R(t)表示为
(8)
式中:E(t)i(i=1,2,3)为惯性张量I的特征向量:
E(t)j=[e(t)jxe(t)jye(t)jz]T,j=1,2,3
(9)
6) 将坐标系原点转移到质心C(t)上,各标志点的坐标为
P(t)i=G(t)i-C(t),i=1,2,…,n
(10)
7) 惯性张量I表示为
(11)
设A系为全局坐标系(即NDI系统自身坐标系),原点为A;D系为大腿局部坐标系,原点为CD(t);X系为小腿局部坐标系,原点为CX(t)。通过上述算法,可以求出各个屈伸角度t时,X系相对于A系的方向余弦矩阵RX(t),及小腿各个标志点在X系下的坐标。根据预定的实验方案,在数据采集过程中大腿是固定不动的,由此可知,在屈伸过程中D系相对于A系的位姿不变。为了计算方便,定义D系各坐标轴的方向与A系各坐标轴方向对应相同,为减小计算误差,取大腿上的四个标志点坐标的平均值作为大腿局部坐标系原点CD(t)坐标。在初始状态下,人体大腿与小腿持平,各坐标系位姿如图4所示。
由上述分析可得:
1) 小腿的局部坐标系X系相对大腿的局部坐标系D系的方向余弦矩阵R(t)为
R(t)=RX(t)
(12)

图4 初始状态下各坐标系位姿Fig. 4 The posture of coordinates in the initial state
2) 小腿的上标志点的坐标在大腿坐标系的表示为
(13)
3) 小腿局部坐标系的点在大腿局部坐标系表示的齐次变换矩阵T:
(14)
将齐次变换矩阵T表示为
(15)
1.3.2 螺旋参数的计算

1) 旋量$ij的前三个参数计算为(LMN)=((oz-ay)(ax-nz)(ny-ox))
(16)
2) 旋量$ij的后三个参数的计算:
①计算:
(17)
式中:a=xtf(oy+az)-ytfox-ztfax;b=-xtfny+ytf(nx+az)-ztfay;c=-xtfnz-ytfoz+ztf(nx+oy)。

(18)
③计算旋量$ij的后三个参数:
(19)
3) 计算绕螺旋轴A的转角φ:
φ=
(20)
4) 沿着螺旋轴A移动的距离d的计算:
(21)
5) 计算旋量的节距q:
(22)

(23)
由上述各式可知,旋量的所有参数都可以求解。比如:式(20)、(21)分别计算绕螺旋轴转角φ和沿螺旋轴移动距离d;式(22)可得节距值q;式(23)表示旋量的坐标,从中可以提取出螺旋轴矢量s。
1.4 膝关节螺旋轴分析和运动模型的建立
任意两组标志点位置坐标之间都存在一个唯一的螺旋运动表示它们的瞬时变化。这些螺旋运动由其瞬时螺旋参数表示(详见1.2.1节),其中一个重要参数就是螺旋轴A。这些螺旋轴的位姿变化表示了膝关节轴线在屈伸过程中的运动特性,如图5~8所示。由图可知,在屈伸过程中,膝关节螺旋轴位姿随着关节转角变化而变化。并且,一个关节转角对应一个唯一的螺旋轴位姿。图9表示了螺旋轴到大腿坐标系原点的距离变化。随着关节转角的增加,螺旋轴到大腿坐标系原点的距离不断减小,表明了膝关节螺旋轴是瞬时的且不固定,与AlonWolf[5]得到的结论相同。
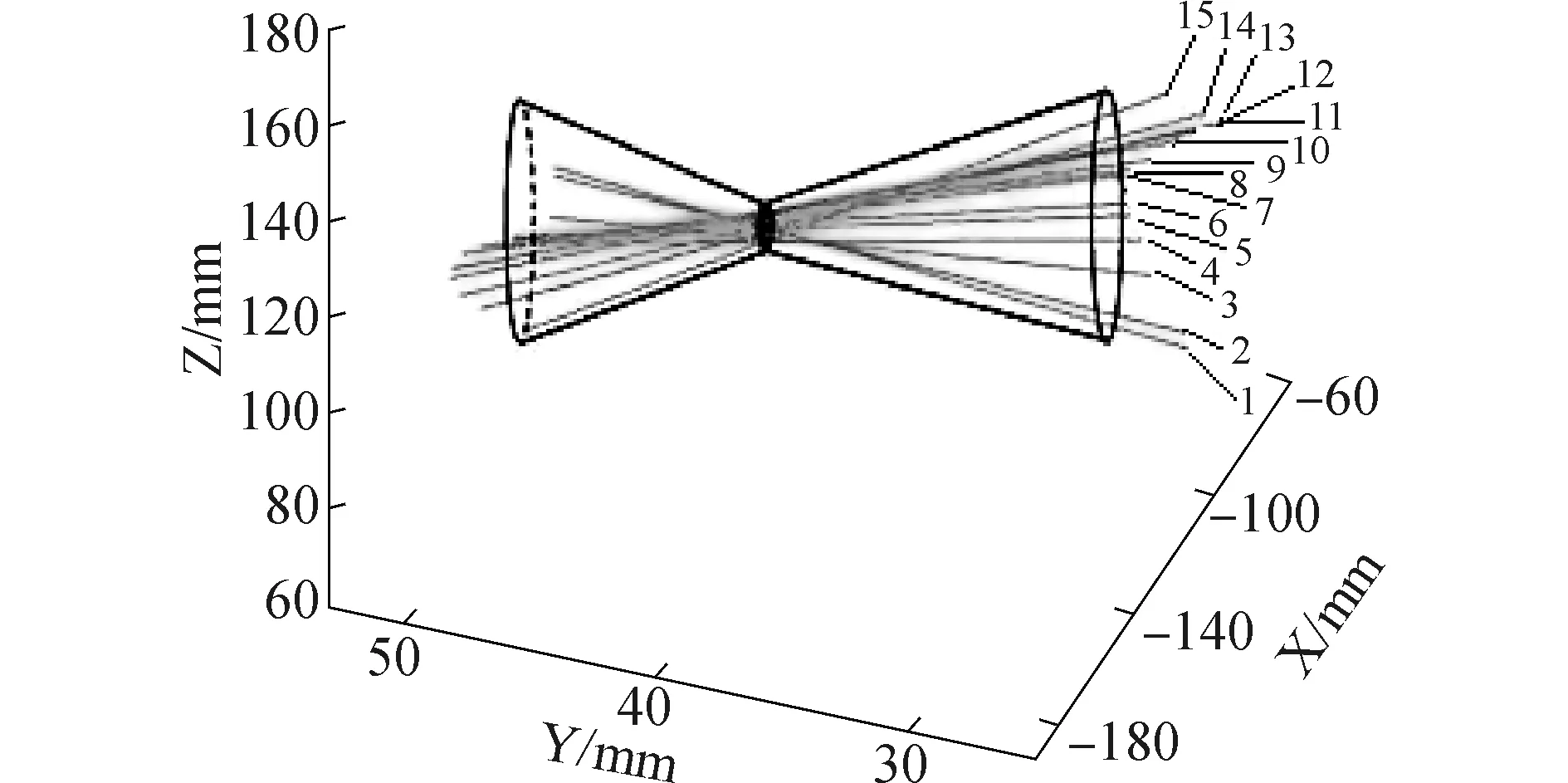
图5 螺旋轴(三维视图)Fig. 5 screw axes(3D view)

图6 螺旋轴(水平面)Fig. 6 screw axes(horizontal)

图7 螺旋轴(额状面)Fig. 7 screw axes(frontal)
根据膝关节的生理结构[11]和螺旋轴的瞬变性,一个关节转角对应一个特定的螺旋轴位姿,也就是说:膝关节关节转角与螺旋轴位姿之间存在确定的运动耦合关系。因此,膝关节的运动学模型可等效为一个关节转角与螺旋轴位姿之间具有确定运动关系的广义1自由度转动副。

图8 螺旋轴(矢状面)Fig.8 screw axes(sagittal)

图9 螺旋轴到大腿坐标系原点的距离Fig.9 The distance between screw axes and the origin of thigh coordinate
2 膝关节外骨骼机构构型综合
2.1 运动不相容分析
由前节分析可知,膝关节的运动学模型可等效为一个轴线瞬变的广义1自由度转动副,如图10所示。具有代表性的膝关节康复外骨骼装置SERKA[6],如图11所示。当外骨骼SERKA与人体大腿、小腿紧致连接后,形成了人-机封闭运动链。假如人体膝关节是轴线固定关节,由于膝关节轴线的不可见性,在初始状态下外骨骼关节轴线与人体膝关节轴线不对齐(如图11虚线所示),在这种情况下,由于自由度小于1,人-机闭链变成了超定运动系统,导致外骨骼SERKA与膝关节之间运动不相容。另一种情况,即使在初始状态外骨骼关节轴线与人体膝关节轴线对齐,如图11实线所示,由于膝关节转动轴线的位姿在屈伸过程中不断变化,也会出现外骨骼关节轴线与人体膝关节轴线不对齐的现象。在这种情况下,人-机闭链也变成了超定运动系统。根据自由度理论,在刚体模型假设下,超定运动系统是不可动的。实际上,由于人体皮肤组织是非刚体,当外骨骼主动关节驱动时,人-机闭链系统会因为人-机连接位置的弹性变形而运动,从而产生了由于过约束导致的内部作用力。然而,这些作用力是由人-机闭链的内部约束,非康复训练任务所需的力。另外,随着人-机闭链运动,这些作用力不断发生变化。如果作用力过大,就容易导致康复训练舒适性变差,甚至二次伤害。
根据上述分析,人机运动不相容和由于过约束在人-机界面处导致的内部作用力主要是由外骨骼机构与人体膝关节之间运动学特性的差异、人机连接误差引起的轴线不对齐以及外骨骼在训练过程中的滑动导致的。另外,从自由度的角度分析,人机运动不相容实际上是由人机闭链过约束导致的。因此,可以直接从人-机闭链是恰定运动系统的角度出发,进行膝关节康复外骨骼机构构型综合。

图10 膝关节运动学模型Fig. 10 Knee kinematic model

图11 外骨骼SERKA和人-机封闭运动链Fig.11 SERKA exoskeleton and human-machine closed chain
2.2 外骨骼机构构型综合
人体膝关节运动学模型为广义1自由度转动副,基于运动仿生设计,设定外骨骼的主动关节也为1自由度转动副。因此,无论是骨骼模型还是外骨骼机构做主动运动,为了保证联体模型均为自由度为1的恰定运动系统,需在外骨骼主动关节与人体联接环节添加被动运动副[12-14],以保证人-机之间运动能够完全相容。由文献[15]可知,空间单闭链机构的自由度公式为
(24)
式中:F为闭链自由度,fi为第i个运动副的相对自由度数,g为运动副的个数,d为运动空间的维度。
F=1+1+fb-6
(25)
式中:fb为联接子链总的自由度数。
由式(25)可知,为了保证人-机闭链自由度F=1,需要在机构主动转动关节与人体膝关节之间添加5个自由度为1(转动副和移动副)的被动运动副,以保证外骨骼主动转动关节轴线与人体膝关节轴线在运动过程中保持对齐。根据上述要求,提出了外骨骼基础构型,如表3所示。
但是,基础构型中运动副数量较多,运动链较长,带来了结构复杂、传递效率较低及外骨骼机构与人体膝关节运动特性偏差较大等弊端。为了简化机构构型,通过低副高代的方法,把外骨骼基础构型中的单自由度运动副(转动副R和移动副P)由高副(球副S、虎克铰U和圆柱副C)替代。简化构型具体形式如表4所示。考虑外骨骼机构的结构简单性、人-机联接子链形式、人-机运动相容性等因素,初选出4种人-机运动相容的外骨骼机构构型,如图12所示,为优选出一种与人体膝关节功能相近的康复外骨骼机构构型做好了准备。

表3 外骨骼基础构型

表4 外骨骼简化构型

图12 外骨骼机构初选构型Fig. 12 Primary configuration of exoskeleton mechanism
由于人体组织是非刚体,人体的大腿段和小腿段可以视为是回转体,为了传递力或力矩到肢体上,人-机连接部件需环绕于大腿和小腿。这些连接部件把由外骨骼施加的力或力矩转化为压力作用于肢体皮肤表面。因此,需特别考虑连接处应力的强度,避免应力过大导致的舒适性变差。假设人体大腿段和小腿段均是以Δ为轴线的回转体,外骨骼机构可施加四种载荷于回转体上[12]:垂直于轴线Δ方向的力,沿着轴线Δ方向的力,绕着垂直于轴线Δ的轴线的力矩和绕着轴线Δ的力矩。
1) 可施加垂直于轴线Δ方向的力,但是与人体皮肤的接触面应尽可能的大,以减小局部应力;反之,接触面积较小,易导致局部应力较大和由于人体组织自身局限性导致力的方向不可控,使得在康复训练中存在安全隐患。
2) 应避免沿着轴线Δ方向的力,膝关节骨骼结构是由转动副和杆件简化组成,因此这类型的力不是康复训练任务所需的力。如果没有释放这个自由度,当人机闭链为超定系统时,将会产生沿着轴线Δ方向的力,导致外骨骼机构沿着轴线Δ方向窜动。由于人-机之间紧致连接,这样的力将使人机之间产生滑动摩擦,导致皮肤表面产生较大的摩擦力,影响康复训练的舒适性。
3) 需谨慎施加绕着垂直于轴线Δ的轴线的力矩,施加这样的力矩易导致外骨骼与人体连接处应力集中,使得康复训练舒适性变差。如果结构允许的话,可由一对大小相等、方向相反的作用力来代替此力偶。
4) 避免传递绕着轴线Δ的力矩,传递此扭矩将使肌肉产生较大程度的变形,以及迫使韧带一定程度的拉长,如图13所示[12]。另外,传递此力矩使得连接部件与人体皮肤之间产生滑动摩擦,易导致康复训练的舒适性变差,甚至给康复训练者带来二次伤害。

图13 传递绕着轴线Δ的力矩引起的组织变形Fig. 13 Transmitting moments around the limb axis involves tissue deformations
综合考虑人-机之间的相互作用力和需释放的自由度,优选出了一种人-机运动相容的康复外骨骼机构构型,如图14所示。圆柱副C可以释放沿肢体段轴线Δ的移动自由度,避免了由于外骨骼机构沿轴线Δ方向窜动导致肢体皮肤表面产生较大的切应力,有助于改善康复训练的舒适性。球副S能够避免绕着垂直于轴线Δ的轴线的力矩;当球副S尽可能靠近轴线Δ时,还能够避免绕轴线Δ的转矩T引起的组织变形(如图13所示)和肢体皮肤表面较大的摩擦力,以提高康复训练的舒适性。在外骨骼主动关节R处,施加绕转动副轴线的转矩可有效地帮助人体膝关节完成康复训练任务。
3 膝关节外骨骼装置的结构设计
建立膝关节康复外骨骼装置三维模型,如图15所示,由大腿穿戴夹具、运动支链、小腿穿戴夹具和驱动装置组成。穿戴夹具用于康复外骨骼与人体下肢的固定连接,防止外骨骼在穿戴训练过程中滑动;运动支链RkCS满足膝关节运动的自由度要求,以保证穿戴外骨骼康复训练时人-机运动相容;驱动装置与外骨骼主动关节Rk相连,为膝关节的主动康复训练提供动力。考虑外骨骼机构结构紧凑,传动链短等角度,设计外骨骼尽可能地贴近下肢肢体,外骨骼横向杆在满足要求的前提下长度最短。从而,在康复训练所需的力大小一定的情况下,力臂越短,需提供的力矩也就越小,降低对驱动装置的要求。此外,为保证康复训练的舒适性和安全性,设计了特定的穿戴夹具,如图16所示。穿戴夹具主要由:夹具外圈、夹具内圈、夹紧气囊、弹性衬套、调节螺纹杆、弹性垫圈、定位键和固定支架组成。利用夹紧气囊充气夹紧的原理,使得穿戴夹具不仅可以适用腿部不同粗细的患者使用,而且能够避免人机之间的刚性接触。

图14 外骨骼构型RkCSFig.14 Exoskeleton mechanism configuration RkCS

图15 膝关节康复外骨骼装置三维模型Fig. 15 Knee rehabilitation exoskeleton device 3D model
另一方面,由于外骨骼重力和人体下肢为非刚体等原因,康复训练过程中易出现外骨骼相对肢体滑动的现象,会导致较大的皮肤表面滑动摩擦力,影响康复训练的舒适性。为了减小滑动摩擦力和改善穿戴舒适性,借鉴文献[14]中外骨骼穿戴夹具的设计特征,在夹具内圈和外圈之间添加了弹性衬套和弹性垫圈等元件。如图17所示,弹性衬套通过固定螺钉与夹具内圈固连,并与调节螺杆通过螺纹连接;弹性垫圈套装在调节螺杆外部,并与夹具外圈相贴合;锁紧螺母装于夹具外圈外侧,将调节螺杆与夹具外圈锁紧。这种结构设计的优点是:在外骨骼重力作用下,弹性衬套和弹性垫圈会产生弹性变形,使得夹具内、外圈之间产生小幅度的相对运动,进而降低了内圈与肢体表面之间的相对运动趋势。另外,弹性衬套和弹性垫圈的变形还能够起到缓冲、吸收能量和降低人机约束强度的作用。

图16 穿戴夹具设计Fig. 16 The design of wear fixture

图17 穿戴夹具局部调节部件Fig. 17 The local regulation components of wear fixture
4 结论
1) 实验采集了膝关节屈伸的运动数据,运用点簇技术算法和螺旋理论提取出了描述膝关节屈伸运动的螺旋参数,证明了膝关节运动轴线的瞬变特性,与Wolf Alon等学者得到的结论相近[4-6],建立了基于膝关节转角与螺旋轴位姿之间确定的耦合关系的膝关节运动学模型;
2) 根据人-机运动相容性和人-机闭链自由度分析,提出了外骨骼机构的基础构型;通过低副高代,得到了机构的简化构型;依据人-机约束力矩作用性质和舒适性,优选出了一种与膝关节运动相容的外骨骼机构构型。考虑穿戴的舒适性和安全性,设计了一种结构简洁、人-机运动相容性的膝关节康复外骨骼装置,为膝关节康复外骨骼设计提供一些理论分析基础和结构设计经验。
[1]DOLLAR A M, HERR H. Lower extremity exoskeletons and active orthoses: challenges and state-of-the-art[J]. IEEE transactions on robotics, 2008, 24(1): 144-158.
[2]李剑锋,吴希瑶,邓楚慧,等.人-机运动相容型下肢康复训练外骨骼机构的构型设计与分析[J].中国生物医学工程学报, 2012, 31(5):720-728. LI Jianfeng, WU Xiyao, DENG Chuhui, et al. The configuration design and analysis of human-machine movement compatible lower limb rehabilitation training exoskeleton mechanism[J]. Chinese journal of biomedical engineering, 2012, 31(5): 720-728.
[3]DOUGLAS A D, MOHAMED R M, RICHARD D. In VIVO determination of normal and anterior cruciate ligament-deficient knee kinematics[J]. Journal of biomechanics, 2005, 38: 241-253.
[4]VA DEN BOGERT A J, REINSCHMIDT C, LUNDBERG A. Helical axes of skeletal knee joint motion during running[J]. Journal of biomechanics, 2008, 41: 1632-1638.
[5]WOLF A. Instantaneous screws of weight-bearing knee: what can the screws tell us about the knee motion[J]. Journal of biomechanical engineering, 2014, 136: 074502-1-074502-7.
[6]JAMES S S, RONALD A R, MICHAEL A P, et al. A highly backdrivable, lightweight knee actuator for investigating gait in stroke[J]. IEEE transactions on robotics, 2009, 25(3): 539-548.
[7]BESIR C, MUSTAFA Y, VOLKAN P. Assiston-knee: a self-aligning knee exoskeleton [J]. 2013 IEEE/RSJ international conference on intelligent robots and systems (IROS), 2013: 996-1002.
[8]WANG Donghai, LEE K M, GUO Jiajie, et al. Adaptive knee joint exoskeleton based on biological geometries[J]. IEEE/ASME transactions on mechatronics,2014, 19(4): 1268-1278.
[9]ANDRIACCHI T P, ALEXANDER E J, TONEY M K, et al. A point cluster method for in vivo motion analysis: Applied to a study of knee kinematics[J]. Journal of biomechanical engineering, 1998, 120: 743-749.
[10]DAVIDSON L K, HUNT K H. Robots and screw theory, applications of kinematics and statics to robotics[M]. Oxford: Oxford University Press, 2004: 84-94.
[11]高秀来, 于恩华. 人体解剖学 [M]. 北京:北京大学医学出版社, 2003: 46-49.
[12]JARRASSE N, MOREL G. Connecting a human limb to an exoskeleton[J]. IEEE transactions on robotics, 2013, 28(3): 697-709.
[13]LIAO Yang, ZHOU Zhihao, WANG Qining. BioKEX:a bionic knee exoskeleton with proxy-based sliding mode control [C]∥ 2015 IEEE International Conference on Industrial Technology. Seville, Spain, 2015: 125-130.
[14]VITIELLO N, LENZI T, ROCCELLA S, et al. Neuroexos: a powered elbow esoskeleton for physical rehabilitation[J]. IEEE transactions on robotics, 2013, 29(1): 220-235.
[15]张启先. 空间机构分析与综合[M]. 北京, 机械工业出版社, 1984: 49-55.
Configuration synthesis and structure design of knee rehabilitation exoskeleton
LI Jianfeng1, HUANG Xiangqiang1, TAO Chunjing2, WANG Sa1, JI Run2
(1. College of Mechanical Engineering and Applied Electronics Technology, Beijing University of Technology, Beijing 100124, China; 2. National Research Center for Rehabilitation Technical Aids, Beijing 100176, China)
In this study, we investigated the problem of designing a human-knee self-adaptive exoskeleton mechanism. From the test data of a knee-joint flexion experiment, we extracted instantaneous helix parameters of knee-joint motion. Given the physiological structure and the helical axis′s transient characteristics of the knee-joint, we established a knee-joint kinematics model. Then, considering the kinematical compatibility between humans and machines, we performed a freedom analysis of the human-machine closed chain and the human-machine constraint moment properties. In this paper, we propose a novel configuration for a knee exoskeleton mechanism, which is compatible with the human knee joint. With the goals of structural simplicity and comfort to the wearer, we designed a novel rehabilitation exoskeleton device for the knee complex, including the design of an exoskeleton body and a specific wearable jig. The proposed human knee exoskeleton enables ideal self-adaptation to the human knee axis.
knee rehabilitation; self-adaption; helical axis; kinematical compatibility; human-machine closed chain; configuration synthesis; physical design
2016-01-24.
日期:2017-03-17.
国家自然科学基金项目(61273342);北京市自然科学基金项目(3132005).
李剑锋(1964-), 男, 教授,博士生导师.
李剑锋, E-mail:lijianfeng@bjut.edu.cn.
10.11990/jheu.201601081
TP242
A
1006-7043(2017)04-0625-08
李剑锋,黄相强,陶春静,等.膝关节康复外骨骼构型综合与结构设计[J]. 哈尔滨工程大学学报, 2017, 38(4): 625-632.
LI Jianfeng, HUANG Xiangqiang, TAO Chunjing,et al.Configuration synthesis and structure design of knee rehabilitation exoskeleton[J]. Journal of Harbin Engineering University, 2017, 38(4): 625-632.
网络出版地址:http://kns.cnki.net/kcms/detail/23.1390.u.20170317.1938.024.html
