基于STM32单片机的微型无人机制作
2017-05-08高尚王婷婷郭焕银
高尚+王婷婷+郭焕银
摘 要:STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核芯片。而且产品产量丰富,应用成熟,故用来做控制芯片。本文主要介绍用STM32单片机控制微型四轴飞行器的电机转速、6轴运动传感器以及与遥控器的无线传输部分。使用PID控制器结合MPU6050分析比较飞行器的动态性能,利用PWM调节电机转速。
关键词:STM单片机;微型四轴飞行器;PID算法;PWM输出
DOI:10.16640/j.cnki.37-1222/t.2017.08.247
0 引言
微型四轴飞行器属于旋翼式飞行器,具有体积小、结构简单、设计成本低等优点,在军事探测、信息采集、增强通信节点等方面应用广泛。系统主要由机架、MCU、传感器模块、无线传输模块、电机和遥控器等部分组成。
1 微型四轴飞行器的结构及原理
微型四轴飞行器属于多旋翼飞行器,四支旋翼安装在电机上,通过分别控制四个电机的转速达到飞行器前进、后退、转向、爬升、下降等效果。微型四轴飞行器的机械结构多采用“十字架”型,四个端点安装电机中间部分放置控制电路、电源电路等。为保证飞行器机械结构平衡,本设计中电路板的外形使用CAD软件绘制,绝对的规则对称。元器件摆放位置既要考虑布线方便也要考虑机械结构平衡。
2 微型四轴飞行器的硬件设计
本设计的硬件结构主要包括两个部分:飞控板和遥控器。
飞控板采用STM32 MCU作为主控芯片,控制电机驱动模块、MPU6050六轴运动传感器及NRF24L01无线传输模块。飞控板上还包含电源模块,使用XC6209稳压芯片为主控芯片提供电压,电机由电池直接供电。飞控板上设有SWD下载模块,方便下载程序和在线调试程序。
遥控器部分也采用STM32 MCU作为控制芯片,该芯片具有性能高、功耗低、成本较低等特点。遥控板上还有蓝牙模块、NRF24L01无线通讯模块,方便与上位机进行通信。本设计遥控器部分采用摇杆控制油门,通过摇杆油门控制更加线性。同时增加了微调按键,可以更好的控制油门和机身方向。
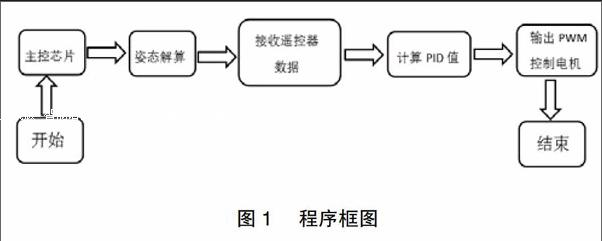
3 微型四轴飞行器的软件设计
本设计的程序主要包含两个部分:遥控器程序和飞控程序。分别都使用STM32芯片作为主控芯片。因为Keil5的在线调试对飞行器参数修改十分方便。所以使用keil5软件编程,编程语言为C语言。
3.1 姿态分析及卡尔曼滤波
本设计飞控板上使用的MPU6050六轴运动传感器,3轴加速度计3轴角速度计。其体积小巧、功耗低、精度高、成本低,被运用在智能手机、运动感测游戏、3D遥控器等众多场合。微型四轴飞行器采集到加速度计和陀螺仪的数据后,经过 数据融合、卡尔曼滤波,将两种数据融合在一起计算出精确的姿态角数据,再将 数据通过串口发送到由匿名科创提供的上位机软件,将三轴姿态角用3D效果图直观显示出来,并修改飞行器的参数。
3.2 NRF24L01无线通信
NRF24L01是常用的无线收发芯片,体积小、低功耗、工作温度范围大、通道多等特点。常用于无线鼠标、遥感勘测、工业传感器等场合。本设计使用两个NRF24L01模块,一个用在遥控器上发送控制电机的数据,一个用于飞控板接收遥控器的油门信号。
3.3 PID控制器
在模拟控制系统中,控制器最常用的控制规律是PID控制。本设计采用位置式PID,在设计中,外环采用角度环进行PI控制,内环采用角速度环进行D控制。 设置这样的串级PID可以使飞行器在大角度偏差时修正速度快,小角度偏差时修正速度慢。外环期望角度为设定值,如悬停的期望值为0°,而实际角度值由卡尔曼滤波后的角度数据提供。外环PI控制器的输出值作为内环D控制器的期望值,内环角速度实际值由传感器MPU6050内部的陀螺仪提供 。
4 系统测试
4.1 硬件测试
遥控器和飞控板焊接完成后需要检测每个焊盘是否虚焊、短接。上电后用手触摸各个芯片、元器件是否发热,如果有不正常发热及时断电。经过检测,遥控器和飞控板的电路正常,可以使用。
4.2 软件测试
將程序分别下载到遥控器和飞控板中。先测试飞控板姿态检测是否准确,观察上位机显示的数据和飞控板姿态是否同步。在检测遥控器和飞控板之间能不能正常通信,给一定的油门量看电机是否有反应。检测发现程序可以正常使用,但需要继续优化。
5 总结
本设计主控使用STM32芯片,用MPU6050姿态采集,采用NRF24101无线模块和蓝牙进行通信控制,以及SWD调试模式。最终经过对软硬件的调试,实现微型四轴飞行器的人工遥控。系统涉及知识比较多,很适合学习研究。
参考文献:
[1]常国权,戴国强.基于STM32的四轴飞行器飞控系统设计[J].单片机与嵌入式系统应用,2015(02).
[2]王贞琪,马洁.四旋翼几种控制方法比较[J].北京信息科技大学学报,2016,31(02):35-39
[3]鲍凯.玩转四轴飞行器[M].北京:清华大学出社,2015.
