结合CRF与ShapeBM形状先验的图像标记
2017-05-03王浩郭立君王亚东张荣
王浩,郭立君,王亚东,张荣
(宁波大学信息科学与工程学院,浙江 宁波 315211)
结合CRF与ShapeBM形状先验的图像标记
王浩,郭立君,王亚东,张荣
(宁波大学信息科学与工程学院,浙江 宁波 315211)
条件随机场(CRF)是一种强大的图像标记模型,适合描述图像相邻区域间(例如超像素)的相互作用。然而,CRF没有考虑标记对象的全局约束。对象的整体形状可以作为对象标记的一种全局约束,利用形状玻尔兹曼机(ShapeBM)在建模对象的整体形状方面的优势,提出了一种CRF与ShapeBM相结合的标记模型。标记模型建立在超像素的基础上,并通过pooling技术在CRF的超像素层与ShapeBM的输入层间建立对应关系,增强了 CRF与 ShapeBM结合的有效性,提高了标记准确率。在 Penn-Fudan Pedestrians数据集和 Caltech-UCSD Birds 200数据集上的实验结果表明,联合模型明显地改善了标记结果。
条件随机场;形状玻尔兹曼机;联合模型;超像素;图像标记
1 引言
图像分割与区域标记是计算机视觉中的核心技术,目的是把图像区域分割成相关的若干部分。现如今很多视觉中的高层应用都依赖于准确的图像分割结果或者标记结果,如对象识别、场景分析等。由于存在遮挡、阴影、目标与背景特征相似等问题使得图像分割与标记一直是计算机视觉中最富有挑战性的任务之一。
在图像标记中将图像标记成对象(前景)与背景部分,已有研究工作表明,CRF常常被用于图像标记任务。在图像的标记任务中,图像的局部约束关系一般表示表观特征的局部一致性(相邻的区域更可能具有相同标记)。CRF是一个概率图模型,能够有效地描述图像的局部约束关系,而对要标记对象的全局约束关系的描述具有局限性。例如,当对象部分区域边界模糊时,CRF仅仅利用图像的局部约束关系,很可能将表观特征相似的背景错标记成对象部分,或者反之。在这种情况下,引入对象的全局约束来补充CRF在对象标记上的局限性。近年的研究表明,受限的玻尔兹曼机(RBM)和它的一些扩展模型,例如深度玻尔兹曼机(DBM)等,常常被用于目标对象的形状建模,特别是Eslami等人提出的ShapeBM (形状玻尔兹曼机)在捕捉目标对象的形状方面有很好的表现,而对象的形状信息可以作为对象全局约束的一种表示。本文提出了一种CRF结合ShapeBM的标记模型,有效结合了CRF模型(增强相邻节点之间的局部约束)与ShapeBM模型(获得目标对象的整体形状信息作为对象的全局约束)的优点,获得较好的标记效果。这个模型有效地权衡了以下3个目标。
· 区域标记结果应该与图像的底层特征一致。
· 完整的图像标记结果应该符合通过训练数据所学习到的形状先验。
· 结合局部与全局约束使得区域标记结果遵守对象边界。
其中,第一个目标由CRF部分完成,第二个目标通过训练ShapeBM完成,而第三个目标由CRF与ShapeBM联合完成。在Penn-Fudan Pedestrians数据集和Caltech-UCSD Birds 200数据集上评估了所提出的模型的标记效果,经过实验论证发现提出的模型比 CRF和ShapeBM等模型效果好。
本文的主要工作总结如下。
·所提出的模型有效地结合了CRF和ShapeBM模型,保持了图像局部约束与对象全局约束的一致性。
·针对联合模型求解较难的问题,给出了有效的训练和推断算法。
· 联合模型在对象标记的结果上要明显优于基本的CRF模型与ShapeBM模型。
2 相关工作
Lafferty等人在2001年基于隐马尔可夫模型和最大熵模型的理论基础提出了CRF[1],是一种概率图模型,最早应用于自然语言处理,近年来已成功应用于图像分割[2-5]。He等[3]用CRF分割静态图像,通过引入隐随机变量加入更多的上下文知识以便进行图像分割。Zhang等[6]将超像素方法引入CRF模型中,通过一种各向异性扩散算法将图像过分割成超像素区域,然后将区域作为CRF图模型中的节点,通过参数估计获得给定测试图像的最优标记。上述方法均只利用图像局部约束信息,缺乏标记对象的全局约束信息,导致对象边界模糊的情况,分割效果不理想。针对上述情况,引入对象全局约束信息来补充CRF的局限很有必要。对象的形状约束信息可以作为对象全局约束信息的一种表现形式,最近很多文献都采用了RBM[7]或者其扩展模型来获取对象的形状约束信息。Salakhutdinov等[8]在RBM的基础上提出DBM,是一个多层的RBM模型,通过多层的RBM进行特征提取获得目标对象的高层语义特征如形状、姿态等。Eslami等[9]提出了ShapeBM,是一个两层的DBM,第一层将输入单元分成4部分,每一部分与其相对应的部分隐单元连接,而第二层与RBM相同采用全连接,ShapeBM在对象形状建模上取得较好效果。近年来有许多方法也在图像的局部约束和对象的全局约束相结合上做了很多工作。Kae等[10,11]提出通过RBM模型学习人脸形状先验特征作为对象全局约束,并借助于CRF分割框架能够融入其他分割线索的特性,将所学到的形状先验融入CRF分割框架中,获得较好的分割与标记效果。Chen等[12]通过ShapeBM学到的对象形状先验结合到 Cremers等[13]提出的变分分割模型中,通过求其能量函数最小达到分割的效果。
联合模型同样根据CRF分割框架能够融入多种分割线索的特性,通过ShapeBM学习对象的形状先验,并以能量项的形式融入CRF分割框架中,通过有效训练和推断算法,得到最终标记结果。所提出的模型尽管与上述介绍的局部与全局约束相结合的方法相似,但是联合模型与它们有一些区别。首次提出CRF与ShapeBM结合的联合标记模型,该联合模型采用超像素标签代替像素标签,有效地利用了超像素边界通常与真实对象边界一致的特性,提高了联合模型的分割效果并且降低了联合模型计算的复杂性,并且通过pooling技术解决了图像的超像素个数与ShapeBM输入节点不对应问题,使得CRF与 ShapeBM有效结合并保持了图像局部约束与对象全局约束的一致性。
3 模型建立
提出CRF与ShapeBM结合的联合模型,该模型有效地结合了图像局部约束与对象全局约束,其中用CRF描述图像的局部约束,用ShapeBM描述对象形状作为对象的全局约束,首先分别介绍基本CRF模型、ShapeBM模型,在此基础上详述提出的CRF与ShapeBM相结合的联合模型。
使用如下定义。
·S(I)表示图像I的超像素个数。
·V(I)={1,…,S(I)}表示第 I幅图像的超像素节点的
集合。
·ε(I)={(i,j),i,j∈V(I)}表示相邻超像素节点组成的边
的集合。
·V(I)={XV(I),Xε(I)}表示节点特征与边特征的集合,其中XV(I)表示节点特征的集合即{xsnode∈RDn,S∈V},Dn表示节点特征的维度。Xε(I)表示相邻节点连接边的边特征集合即{xijedge∈RDe,(i,j)∈ε},De表示边特征的维度。
·Y(I)={ys∈{0,1}L,S∈V表示图像超像素节点标签的集合,其中 L表示类标签数,本文的实验中 L为 2,ys中 0表示背景,1表示对象 (前景)。即本文中的联合模型完成图像前景背景二类标记问题。
3.1CRF
CRF是一个强大的判别型模型,并在文本分析、图像分割[2-4,14]等领域有广泛应用。CRF的条件分布与其能量函数定义如下:


其中,Enode(Y,XV)表示CRF中的一阶势,表示超像素属于对象或属于背景的似然。Eedge(Y,Xε)表示二阶势,主要决定了两个超像素之间是如何相互作用的,体现对象的局部约束,主要作用是去除锯齿、平滑边界。通过求解训练集 V(I)={Y(I),X(I)}Ii=1的最大条件似然概率来训练其模型参数:

对于该条件似然概率可以通过 LBP (loopy belief propagation)[15]或者结合了标准优化算法 LBFGS[16]的平均场估计[17](mean-field approximation)计算。
3.2ShapeBM
针对对象形状信息的获取,近些年RBM及其扩展模型在这方面应用较多,本文所采用的模型是RBM的一种扩展模型ShapeBM,已有文献证明它相对于RBM能够更加有效地提取对象整体形状信息。RBM可以被视为一个无向图,具有一个可见层、一个隐藏层,其层间全连接层内无连接,结构如图1(a)所示。ShapeBM是一个3层模型,具有一个可见层和两个隐层,ShapeBM具体结构如图1(b,c)所示,由图1(c)可以看出,ShapeBM的可见层与第一层隐层相比RBM有些变化,主要是可见层分成了4部分区域,并且每部分区域之间有部分重叠,区域重叠使得ShapeBM能够更好地训练对象边界的连续性。另外,可见层中每部分可见单元与其相对应的部分隐层单元的连接权值共享(如图1(c)中阴影部分可见单元与阴影部分隐层单元的连接权值可以共享作为其他颜色部分的连接权)。但其可见单元偏置不共享。权值共享使得ShapeBM第一层的参数相对于全连接方式要缩小16倍,即ShapeBM对训练集数量要求变小。ShapeBM两个隐层的隐单元间的连接方式与RBM相同,采用全连接。
ShapeBM能通过图模型的多层结构对对象的整体形状信息进行提取,使其最高层隐单元含有一些形状信息,通过实验结果验证了这一点。在Penn-Fudan Pedestrians数据集和Caltech-UCSD Birds 200数据集上通过一定数量的训练集训练,得到了ShapeBM最高层隐单元所含有的形状信息,并通过重构得出可视化的结果,图2列举出部分代表性重构结果。由其结果可以看出,ShapeBM能够得到对象的整体形状,但可能会丢失一些细节,这也表明,能够对同一类对象的形状进行抽象描述。由此可见,ShapeBM能够抽象出对象形状作为对象全局约束融合到联合标记模型中。

图1 ShapeBM结构

图2 部分代表性重构结果
在本文中,假设ShapeBM有R2个可见单元yr∈{0,1}L,第一层隐层h1有K个隐单元,第二层隐层h2有M个隐单元。它们的联合分布可以有如下定义:

其中,W1∈RR2×L×K是可见单元与第一层隐单元之间的连接权重,W2∈Rk×M表示第一层隐层h1与第二层隐层h2之间的连接权重。bk表示第一层隐节点的偏置值,arl表示可见节点的偏置值,cm表示第二层隐节点的偏置值。训练ShapeBM分为两步,首先采用DBM分层贪婪预训练的方式去预训练ShapeBM的每一层,预训练第一个RBM时其连接方式要遵守ShapeBM的连接方式,通过预训练的方式得到初始化参数θ={W1,W2,a,b,c}。将得到的初始化参数θ={W1,W2,a,b,c}作为 ShapeBM的初始参数,然后采用随机梯度下降(stochastic gradient descent)法最大化如下对数函数来微调参数θ:

由于参数的梯度不易直接求解,采用平均场估计(mean-field approximation)来近似计算。
3.3 联合模型
在图像标记中,表观特征的局部一致性(相邻的区域更可能具有相同标记)和全局一致性约束(对象的整体形状)都很重要。一方面,CRF在通过二阶势(边势能)建模局部一致性方面具有优势;另一方面,ShapeBM能通过隐层单元描述对象全局形状结构。本文从两者优点出发,采用有效的方式融合了CRF与ShapeBM得到联合标记模型,使其既有局部约束又有全局约束即对象形状信息。
3.3.1 基于超像素的CRF与ShapeBM结合方式
联合模型中CRF与ShapeBM的结合是基于超像素的,基于超像素的结合有以下两点好处:一,超像素的边界通常为真实对象边界,提高了联合模型的分割效果;二,采用超像素代替像素,降低了计算的复杂性。然而,采用超像素也给CRF与ShapeBM的结合带来一定困难。由于不同图像的超像素个数不固定,而ShapeBM要求输入层的可见层节点数量是固定的,这造成超像素个数与ShapeBM的输入节点不对应,因此不能简单地将超像素标签层作为ShapeBM的输入与其隐节点直接相连,需要对其进行处理。为了建立超像素标签层与ShapeBM隐节点之间的连接,在超像素标签层与ShapeBM隐层之间引入一个固定大小的虚拟标签层,将每个超像素标签节点通过pooling方式映射到R×R个虚拟标签层节点,每个虚拟可见节点都是一个小方格,如图3所示,上面3层是ShapeBM部分,包括虚拟可见节点层以及两层隐藏节点层。下两层是CRF部分,包括特征层以及超像素标签层。其中P(i)rs1表示pooling中的映射概率用r来表示一个虚拟节点的标签。重新定义ShapeBM的能量函数,其函数定义如下:



图3 联合模型
其中,Region(s)和Region(r)表示对应超像素s覆盖区域和标签层第r个节点在超像素层投影覆盖的区域。
另外,CRF部分采用的是基本 CRF的一个变形叫做空间条件随机场(SCRF)[10],它利用了对象空间分布的特征,将对象的空间依赖关系引入CRF。例如,在空间上人体的头部在躯干的上方,而躯干在腿部的上方。具体做法将图像规则成 N×N的虚拟小格(注意这里的虚拟小格的大小与上文 ShapeBM虚拟输入中的 R×R的虚拟小格不同),这时一个超像素可能跨越多个虚拟小格,这样每个超像素落在不同小格的部分都能够学习到不同的节点特征权重。本文定义SCRF的一阶势函数如下:

其中,Nsd表示第 S个超像素的节点特征,αnld为每个超像素落在不同虚拟方格部分的节点权重,Psn表示每个超像素由哪几个虚拟小方格组成psn求解类似于上文prs采用面积比,区别在于psn表示每个小方格在一个超像素中的面积占比。
SCRF二阶势函数定义如下:

其中,xije表示边特征,用来衡量相邻超像素之间的相似度。βll′e为相邻超像素间边特征的对应权重。
有了SCRF和ShapeBM的具体形式,而本文联合模型是在超像素的基础上结合SCRF与ShapeBM模型。因此,可以得到联合模型的具体形式。具体地,在给定的超像素特征X下,超像素标签集Y的条件分布以及能量函数定义如下:

从上述定义可以看出,联合模型的结合在形式上仅仅是结合了SCRF和ShapeBM的能量函数。但是,实际上,本文提出的基于超像素的pooling方式在SCRF和ShapeBM的结合上起着至关重要的作用。
3.3.2 联合模型的训练与推断
关于联合模型的训练,原则上,可以直接通过最大化条件似然概率来一起训练模型的参数{W1,W2,a,b,c,α,β}。但是实际上,会通过单独预训练SCRF和ShapeBM来提供一组参数作为联合模型的初始参数,然后采用随机梯度下降法(stochastic gradient descent)最大化联合模型对数似然函数来调整参数{W1,W2,a,b,c,α,β}。模型的整个训练步骤见算法1。在算法1的步骤3采用随机梯度下降法最大化条件似然过程中,由于参数的梯度不易直接求解,本文采用CD-PercLoss[18]方法来近似估计参数梯度,而在CD-PercLoss算法反向计算过程中所推断出的超像素标签不仅仅与ShapeBM的隐节点有关,还与CRF有关,因此超像素的标签和隐节点的联合推断是必需的。本文采用平均场估计的方法来解决该联合推断问题。具体地,发现分布其中能够使达到最小。即可以通过平均场估计的方法循环迭代更新 μsl和 γm来使模型的能量达到最小,从而获得较优的标记结果。平均场具体推断步骤见算法2。
算法1 训练联合模型
(1)通过最大化空间CRF模型(SCRF)的条件似然来预训练参数{α,β}(见式(1)、式(2)、式(9)和式(10))。

(3)通过最大化联合模型的条件似然来训练参数{W1,W2,a,b,c,α,β}(见式(11))。
算法2 平均场推论
(1)初始化μ(0)和γ(0),

(2)for t=0:maxiter(或者直到收敛)do更新 μ(t+1),
更新 γ(t+1),
4 实验与分析
4.1 数据集
本文在 Penn-Fudan Pedestrians数据集[19]和 Caltech-UCSD Birds 200数据集[20]上评估了所提出的联合模型的标记效果。Penn-Fudan Pedestrians数据集共有170张图像,每张图像包含至少一个行人,每个被标记的行人都有ground-truth。根据Penn-Fudan Pedestrians数据集的行人检测框标记信息提取出行人检测框部分的图像,得到423张单个行人图像并将图像大小统一为128 dpi×256 dpi像素。为了增加训练和测试样本,对Penn-Fudan Pedestrians数据集提取的 423张行人图像进行镜像对称复制形成846张图像的数据集,其中500张图像作为训练集,346张图像作为测试集。
Caltech-UCSD Birds 200数据集包含 200类鸟类的6 033张图像,图像拥有粗糙的分割掩膜,因为其掩膜精确度不够,Yang等人[21]手动标记出该数据集中图像的准确掩膜,采用Yang等人手动标记的准确掩膜作为该数据集标准结果。另外本文根据数据集提供的检测框标记对6 033张图像分别提取出其中检测框部分的图像并将图像大小统一为128 dpi×128 dpi像素。其中3 033张图像作为训练图像,3 000张图像作为测试图像。
4.2 仿真与分析
本文对两个数据集中的每张图像都采用SLIC[22]方法进行超像素分割(如图4所示),并基于标准分割掩膜对每个超像素进行了标记作为 ground-truth。图 4(a)是Penn-Fudan Pedestrians数据集和 Caltech-UCSD Birds 200数据集中根据标记信息提取的单张图像,图4(b)是通过SLIC方法分割获得的超像素图片,图4(c)为ground truth。

图4 超像素分割
对每个超像素使用如下的节点特征。
·颜色:在LAB空间中采用K-means产生的64位归一化颜色直方图。
·纹理:采用参考文献[23]产生的64位归一化纹理直方图。
·位置:每张图像规则成8 dpi×8 dpi的方格,超像素落在每个方格的概率直方图。相邻超像素之间采用如下的边特征。
· 采用参考文献[24]边界的PB值之和。
· 平均颜色直方图之间的欧式距离。
· 采用参考文献[25]计算纹理直方图之间的卡方距离。
评估模型的标记能力时采用了4种不同的模型:标准的CRF、SCRF、ShapeBM以及本文联合模型。本文在CPU为Intel Xeon E5-2650 2.60 GHz,内存为128 GB的计算机上进行实验。
本文正确率的衡量标准如下:

式(13)主要表示标记正确的超像素个数和总的超像素个数的比例。其中Yi表示第i张测试图像的超像素标记结果,OR为异或操作,GT(i)为第张测试图像超像素标记的ground-truth,I表示测试图像的数量。
针对Penn-Fudan Pedestrians数据集,经过多次实验证明,本文设置参数K=500,M=200,R=30,N=23具有较优的效果。通过10次交叉实验,每次实验的500张训练图像和346张测试图像都不完全相同,通过式(13)得到每次实验的准确率并通过平均得到本文最终实验准确率87.90%。在相同实验情况下,相对于标准CRF,SCRF、ShapeBM在超像素标记上准确率都有提高,具体对比结果见表1。表1中的错误率减少的比例表示模型相较于标准的CRF错误率减少程度。还给出了Penn-Fudan Pedestrians数据集中具有代表性的部分可视化分割结果,如图5所示。图5(a)表示联合模型相较于其他模型分割效果较好的部分对比结果,图5(b)表示联合模型分割效果不理想的部分对比结果,其中第一列为原图,第二列为CRF模型分割结果,第三列为SCRF模型分割结果,第四列为本文联合模型分割结果,第五列为ground-truth。联合模型结合了对象的整体形状先验,所以相对于其他的两个未增加对象整体形状信息的模型,联合模型能够调整明显违背对象形状信息的错误标记,如图5(a)中第1行,行人两腿中间有一块错误标记,该错误标记明显违背了对象形状信息,联合模型通过形状信息将该部分错误标记调整过来。另外,如图5(a)中第2行,行人的脸部和行人的手臂处都有一部分缺少,而联合模型能够通过形状信息将其填充完整。然而,联合模型有时在部分样本上分割效果不理想,如图5(b)中第2行,由于图片分辨率较低以及光照影响较强,联合模型在处理光照变化存在一定局限性,所以导致图像分割失败,但是其他模型在这种情况下分割效果也不理想。如图5(b)中第5行,图像中人体对象的腿部部分,联合模型将背景中的腿部部分错误估计为人体对象形状的一部分造成错误分割。
针对Caltech-UCSD Birds 200数据集,经过多次实验证明,设置参数K=400,M=100,R=32,N=21具有较优的效果。通过10次交叉实验,每次实验的3 033张训练图像和3 000张测试图像都不完全相同,通过式(13)得到每次实验的准确率并通过平均得到本文最终实验准确率83.34%。在相同实验情况下,相对于标准CRF,SCRF、ShapeBM在超像素标记上准备率对比结果见表2,可以看出联合模型准确率为83.34%相对于其他方法有提高。理论上,该数据集上联合模型正确率提高的程度应该比Penn-Fudan Pedestrians数据集上高,因为该数据集的训练样本多,训练效果应该更好。但是实际上,从具体数据看,在该数据集上联合模型正确率提高的程度相对于Penn-Fudan Pedestrians数据集提高的程度反而较低,主要因为该数据集中包含了200类鸟类图片,各类鸟类的形状差异较大。而本文是直接将3 033张多类鸟类的图像统一作为训练集,使得训练集中鸟类形状多样化,所以联合模型训练出的结果并不理想。后期可以考虑将形状近似的鸟类作为训练集, 训练出一个较好的结果。关于Caltech-UCSD Birds 200数据集的具有代表性的部分可视化分割结果如图6所示。

表1 本文方法与其他方法在Penn-Fudan Pedestrians数据集上标记准确率对比

表2 本文方法与其他方法在Caltech-UCSD Birds 200数据集上标记准确率对比
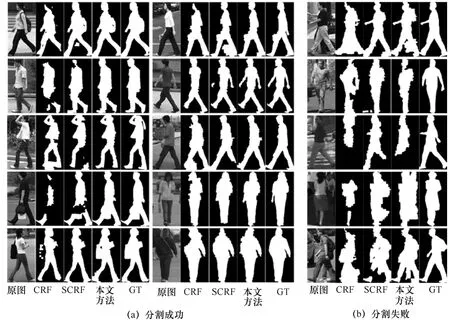
图5 Penn-Fudan Pedestrians数据集上的部分分割结果

图6 Caltech-UCSD Birds 200数据集上的部分分割结果
对联合模型的算法复杂度进行分析。CRF模型使用LBP算法预测一副图像标签的时间复杂度是O(ELC)[28],E为图模型中边的数量,边数与超像素个数S直接关联,使用Ncut算法估算E为4×S,C为超像素块的大小,即CRF算法复杂度为ShapeBM模型算法复杂度分为正向学习阶段时间复杂度和反向学习阶段时间复杂度,其中正向学习的时间复杂度为O(N×h1×h2×n),反向学习的时间复杂度为 O(N×h1×h2×kCD1×kCD2),则ShapeBM算法复杂度为O(N×h1×h2×(kCD1+kCD2+n)),其中N表示ShapeBM虚拟输入节点个数,h1表示第一层隐层节点个数,h2表示第二层隐层节点个数,kCD1、kCD2表示对比散度算法迭代次数,n表示迭代次数。因为联合模型的能量函数是SCRF与ShapeBM的能量函数的叠加,即SCRF与ShapeBM能量函数为线性关系,故联合模型的整体复杂度为即联合模型在标记准确率提高的情况下,整体复杂度并没有更复杂。
5 结束语
本文提出了一种结合CRF与ShapeBM的新标记模型,将ShapeBM与CRF的结合建立在超像素基础上,通过pooling技术克服图像超像素个数与ShapeBM输入不对应问题,使得该模型有效地结合了CRF模型(增强相邻节点之间的局部约束)与ShapeBM模型(获得目标对象的整体形状信息作为对象的全局约束)的优点。在与其他方法的对比实验中验证了本文模型在标记准确性方面的优势。在未来的工作中,可以将本文的二类标记应用到多类标记中,可以做人体对象的部件检测、场景分析。另外,可以在该模型中加入时间势,在视频帧之间建立联系,后期可将该模型扩展到视频对象分割上。
[1]LAFFERTY J,MCCALLUM A,PEREIRAF C,etal. Conditional random fields:probabilistic models for segmenting and labeling sequence data[C]//ICML,June 28-July 1,2001, Williams College,UK.New Jersey:IEEE Press,2001.
[2]BORENSTEIN E,SHARON E,ULLMAN S,et al.Combining top-down and bottom-up segmentation [C]//Conference on Computer Vision and Pattern Recognition,June 27-July 2, 2004,Washington,DC,USA.New Jersey:IEEE Press,2004.
[3]HE X,ZEMEL R S,CARREIRAPERPINAN M A,et al. Multi-scale conditional random fields for image labeling[C]// Conference on Computer Vision and Pattern Recognition,June 27-July 2,2004,Washington,DC,USA.New Jersey:IEEE Press, 2004.
[4]HE X,ZEMEL R S,RAY D,et al.Learning and incorporating top-down cues in image segmentation[C]//European Conference on Computer Vision,May 7-13,2006,Graz,Austria.New Jersey:IEEE Press,2006:338-351.
[5]SHOTTON J,WINN J,ROTHER C,et al.Texton boost for image understanding: multi-class object recognition and segmentation by jointly modeling texture,layout,and context[J]. International Journal of Computer Vision,2009,81(1):2-23.
[6]ZHANG L.A unified probabilistic graphical model and its application to image segmentation[J].Rensselaer Polytechnic Institute,2009(3).
[7]SMOLENSKY P.Information processing in dynamical systems: foundations of harmony theory[M].Cambride:MIT Press,1986(1): 194-281.
[8]SALAKHUTDINOV R,HINTON G E.Deep Boltzmann machines[J].Journal of Machine Learning Research,2009,5(2): 1967-2006.
[9]ESLAMI S M,HEESS N,WILLIAMS C K,et al.The shape Boltzmann machine:a strong modelofobjectshape[J]. International Journal of Computer Vision,2014,107(2):155-176.
[10]KAE A,SOHN K,LEE H,et al.Augmenting CRFs with Boltzmann machine shape priors forimage labeling[C]// Conference on Computer Vision and Pattern Recognition,June 23-28,2013,Portland,Oregon,USA.New Jersey:IEEE Press, 2013.
[11]KAE A,MARLIN B M,LEARNEDMILLER E G,et al.The shape-timerandom field forsemantic video labeling[C]// Conference on Computer Vision and Pattern Recognition,June 23-28,2014,Columbus,OH,USA.New Jersey:IEEE Press, 2014.
[12]CHEN F,YU H,HU R,et al.Deep learning shape priors for object segmentation[C]//Conference on Computer Vision and Pattern Recognition,June 23-28,2013,Portland,Oregon,USA. New Jersey:IEEE Press,2013.
[13]CREMERS D,SCHMIDT F R,BARTHEL F,et al.Shape priors in variational image segmentation: Convexity, Lipschitz continuity and globally optimal solutions[C]//Conference on Computer Vision and Pattern Recognition,June 24-26,2008, Anchorage,Alaska,USA.New Jersey:IEEE Press,2008.
[14]ARBELAEZP,HARIHARAN B,GU C,etal.Semantic segmentation using regions and parts [C]//Conference on Computer Vision and Pattern Recognition,June 16-21,2012, Providence,RI,USA.New Jersey:IEEE Press,2012.
[15]MURPHY K,WEISS Y,JORDAN M I,et al.Loopy beliefpropagation for approximate inference:an empirical study[C]// 15th Conference on Uncertainty in Artificial Intelligence,July 30-August 1,1999,Stockholm,Sweden.New Jersey:IEEE Press,1999.
[16]SCHMIDT M. minFunc: unconstrained differentiable multivariate optimization in Matlab[EB/OL].[2016-07-10].http://www.di.ens.fr/~mschmidt/Software/minFunc.html.
[17]SAUL L K,JAAKKOLA T S,JORDAN M I,et al.Mean field theory for sigmoid belief networks[J].Journal of Artificial Intelligence Research,1996(13).
[18]MNIH V,LAROCHELLE H,HINTON G E,et al.Conditional restricted Boltzmann machines for structured output prediction[C]// Conference on Uncertainty in Artificial Intelligence,Aug 15-17, 2012,Catalina Island,USA.New Jersey:IEEE Press, 2012.
[19]WANG L,SHI J,SONG G,et al.Object detection combining recognition and segmentation[C]//Asian Conference on Computer Vision,November 18-22,2007,Tokyo,Japan.New Jersey: IEEE Press,2007.
[20]WELINDER P,BRANSON S,MITA T,et al.Caltech-UCSD Birds 200[J].California Institute of Technology,2010.
[21]YANG J,SAFAR S,YANG M H.Max-margin Boltzmann machines for object segmentation [C]//IEEE Conference on Computer Vision and Pattern Recognition,June 23-28,2014, Columbus,OH,USA.New Jersey:IEEE Press,2014.
[22]ACHANTA R P,SHAJIA,SMITH K M,etal.SLIC superpixels compared to state-of-the-art superpixelmethods[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(11):2274-2282.
[23]MALIK J,BELONGIE S,SHI J,et al.Textons,contours and regions:cue integration in image segmentation[C]//ICCV, September 20-25,1999,Kerkyra,Corfu,Greece.New Jersey: IEEE Press,1999.
[24]MARTIN D R,FOWLKES C C,MALIK J,et al.Learning to detect natural image boundaries using brightness and texture[C]// Conference on Neural Information Processing Systems, December 8-13,2003,Providence,USA.New Jersey:IEEE Press,2003.
[25]HUANG G B,NARAYANA M,LEARNEDMILLER E G,et al.Towardsunconstrained face recognition [C]//Conference on Computer Vision and Pattern Recognition,June 24-26,2008, Anchorage,Alaska,USA.New Jersey:IEEE Press,2008.
[26]COHN T.Efficientinferencein largeconditionalrandom Fields[M].Berlin:Springer,2006:606-613.
CRF combined with ShapeBM shape priors for image labeling
WANG Hao,GUO Lijun,WANG Yadong,ZHANG Rong
School of Electrical Engineering and Computer Science,Ningbo University,Ningbo 315211,China
Conditional random field(CRF)is a powerful model for image labeling,it is particularly well-suited to model local interactions among adjacent regions (e.g.superpixels).However,CRF doesn’t consider the global constraint of objects.The overall shape of the object is used as a global constraint,the ShapeBM can be taken advantage of modeling the global shape of object,and then a new labeling model that combined the above two types of models was presented.The combination of CRF and ShapeBM was based on the superpixels,through the pooling technology was wed to establish the corresponding relationship between the CRF superpixel layer and the ShapeBM input layer.It enhanced the effectiveness of the combination of CRF and ShapeBM and improved the accuracy of the labeling.The experiments on the Penn-Fudan Pedestrians dataset and Caltech-UCSD Birds 200 dataset demonstrate that the model is more effective and efficient than others.
CRF,ShapeBM,join model,superpixels,image labeling
TP391
A
10.11959/j.issn.1000-0801.2017004

王浩(1992-),男,宁波大学信息科学与工程学院硕士生,主要研究方向为计算机视觉与模式识别。

郭立君(1970-),男,博士,宁波大学教授,主要研究方向为计算机视觉与模式识别、移动互联网及其应用。

王亚东(1990-),男,宁波大学信息科学与工程学院硕士生,主要研究方向为计算机视觉与模式识别。

张荣(1974-),女,博士,宁波大学副教授,主要研究方向为计算机视觉与信息安全。
2016-07-24;
2016-09-30
郭立君,guolijun@nbu.edu.cn
国家自然科学基金资助项目(No.61175026);浙江省自然科学基金资助项目(No.LY17F030002);宁波市自然科学基金资助项目(No.2014A610031);浙江省“信息与通信工程”重中之重学科开放基金资助项目(No.xkxl1516,No.xkxl1521)
Foundation Items:The National Natural Science Foundation of China(No.61175026),Zhejiang Provincial Natural Science Foundation of China(No.LY17F030002),Ningbo Municipal Natural Science Foundation(No.2014A610031),Open Research Fund of Zhejiang First-Foremost Key Subject-Information and Communications Engineering of China(No.xkxl1516,No.xkxl1521)
