一种基于浮球阀门控制的自动换瓶装置研究
2017-05-03刘玮沈颖惠邹进黄谦卜丹霞张帆
刘玮,沈颖惠,邹进,黄谦,卜丹霞,张帆
岳阳职业技术学院 医学基础部,湖南岳阳 414000
一种基于浮球阀门控制的自动换瓶装置研究
刘玮,沈颖惠,邹进,黄谦,卜丹霞,张帆
岳阳职业技术学院 医学基础部,湖南岳阳 414000
目的研究并开发一种用物理原理控制的、不耗电的医用输液自动换瓶装置来减轻临床护士换瓶工作量。方法先对比分析各物理原理控制的自动换瓶装置的优缺点,找出浮球阀门控制的核心原理、控制位点及技术难点,对浮球及浮球阀门室的相关指标进行函数推导,根据推导结果确定适合的参数,包括医用材料选择、浮球阀门形状及大小、阀门室大小及各开口位置等并最终设计成型。结果通过建模验证浮球阀门实现了控制液体、气体分时相、分通道通过输液头的功能。结论该浮球阀门控制的自动换瓶装置结构简单,成本低廉,使用便捷,安全可靠,且为全软袋输液或软袋硬瓶混合输液的自动换瓶装置研究提供了一个全新的解决思路。
物理原理;浮球阀门;医用输液;软袋输液;自动换瓶装置
引言
医疗器械的自动化、智能化是一大发展趋势。医院输液自动换瓶装置由于具有减轻护士劳动强度、降低护患纠纷、免于照看,不影响患者休息等优点而成为医疗器械研究的热点。然而,一提到自动换瓶控制,人们很容易就想到自动控制原理,即由探测器、中心处理器、效应控制器等基本部件构成。这种方式笔者也做过研究并且已经申请了中国国家发明专利[1-2],但这种装置的缺点也比较明显,一是体积较大,使用不方便,特别是不能随意移动;二是可靠性低,易受其它因素的影响,且要供电,使用成本也高。针对以上这些缺点,研究一种全新原理控制的自动换瓶装置就显得非常必要。物理原理(如重力、浮力、气压等)是自然界中普遍存在的自然规律,巧妙利用这些原理来实现自动控制能实现许多相对优点,如:结构简单、轻便、可靠性高,且不耗电,使用极其方便。
1 常见医用输液物理控制自动换瓶的原理方式及评价
物理控制初看没有电子控制复杂,但要真正实现起来其关键是控制原理是否“精妙”。通过对物理控制原理系统的研究及查阅专利库中相关文献,常见物理原理控制方式有以下几种。
1.1 压强阀门控制
压强阀门控制是输液自动换瓶领域内最易想到的物理控制控制方式,专利库中有较多利用这一原理的专利文件。其基本原理为通过改变各液体瓶的压强来实现自动换瓶,使压强最大的首先输液,压强第二的次之,如此类推。这种方式操作起来有一定难度,它既要考虑瓶内随着输液其压强的变化,又要考虑多瓶液体时使用高度的限制,使产品设计复杂化,同时,它还存在不能临时加挂的抗生素类输液瓶、不能杜绝输液瓶药液大量混合的问题,因此目前市场上一直没有该类产品销售[3-6]。
1.2 流体阀门控制
如“Y”形阀门控制方法,见图1。其原理是利用流体对“Y”形阀门各分支冲击力大小来控制阀门的开关。即当前端输入液体时,液体冲击“Y”形阀门的下端阀门臂,“Y”形阀门逆时钟旋转,同时封闭上端的进气道和出液道,液体经下端的连接管道流向下一瓶。当前端输入空气时(前一瓶输注完毕),“Y”形阀门右边的阀门臂形成的力矩大于左边两个阀门臂形成的力矩,“Y”形阀门在重合力力矩作用下回位,即顺时针旋转,打开上端导气管和导液管同时关闭下端联络通道,空气进入导气管,使当前瓶液体流出导液管向后一输液头输送,完成自动换瓶。这种物理原理控制自动换瓶装置太过精巧,需要反复探索“Y”形阀门各支重力力矩大小及与输液流体冲击力、阀门关闭力度之间的关系,应用条件苛刻,适应范围狭窄,因而实际应用存在一定难度[3]。
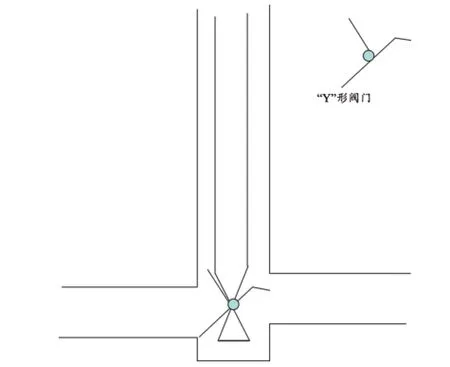
图1 “Y”形阀门控制示意图
1.3 重力阀门控制原理
在医用输液瓶及输液量没有严格标准的情况下,依靠重力来控制自动换瓶的装置没有多大的应用价值,因为其灵敏度和安全性均较差。
浮球阀门控制原理是本团队率先应用的物理控制原理[7-8],它着眼点为输液头内液体有无的变化,推导出浮力变化规律,并应用该浮力变化规律来巧妙设计阀门。该物理原理控制自动换瓶的思路视角独特,突破了思维上的局限,开创了一个全新的研究及应用领域。
2 材料与方法
2.1 浮球阀门控制的控制位点及技术难点
目前常用的医用输液器(管)包括进气管、输液头、出液管、墨菲氏滴管、滴速阀门、转换器、穿刺针等。其中,墨菲氏滴管以下一般不做结构性改动。自动换瓶装置应能一次连接多瓶液体,形成多瓶输液器。多瓶输液器的连接方式多种多样,最普遍的连接方式是用软管连接多个输液头的方式。输液头部位是多瓶输液器的浮球阀门控制机关的最佳实施部位。
在输液头部位实施浮球阀门控制机关要解决以下两个问题:一是避免药液混合的问题,即前一瓶液体如何通过后一瓶的输液头而且还要避免与后一瓶液体相混合;二是如何自动换瓶的问题,即当前一瓶液体输注完毕后即空气进入后一瓶的输液头时,如何及时引导气体流入后一瓶液体瓶内,使后一瓶开始输液,完成自动换瓶。
2.2 产品设计
基于浮球阀门控制的、应用于临床全硬瓶输液的自动换瓶装置的示意图,见图2。
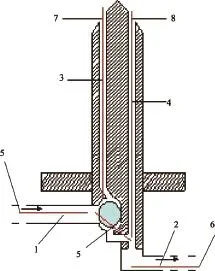
图2 基于浮球阀门控制的自动换瓶装置结构示意图
该浮球阀门控制的自动换瓶输液头由管道及开口、浮球阀门、手柄等基本结构构成。其5个管道包括入液气管、出液气管、导气管、导液管及联络管;对外有4个开口即导气管口、导液管口、入液气管口、出液气管口。使用时,用软管串联连接多个输液头,其中第1个输液头的入液气管口暴露于空气中,最后1个输液头的出液气管口连接墨菲氏滴管及流速控制阀门,多个输液头串联示意图,见图3。
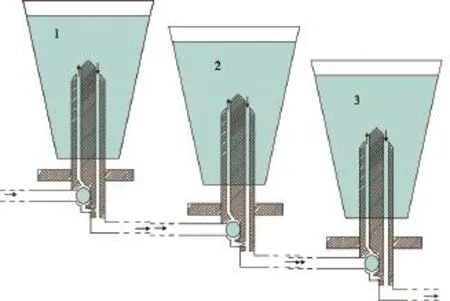
图3 多个输液头串联示意图
2.3 浮球控制的工原理
如图3所示,当前输液头插入第2瓶液体内。当第1瓶输出的液体经入液气管口进入浮球阀门室内并充满阀门室,使浮球阀门上浮,封闭导气管在阀门室的开口,阻止气体、液体进入第2瓶液体瓶内,达到避免液体混合的目的。同时,液体经联络通道流经第2个输液头(即当前输液头)。同理,液体再流经第3个输液头并最终输入人体血管内。当第1瓶液体输注完毕后,空气经第1瓶液体的瓶内流入当前输液头的入液气管口,并进入浮球阀门室,阀门室内液体减少,当浮力小于阀门重力时阀门下降,封闭阀门下端联络管的开口,同时打开阀门上端的导气管开口,这时封闭的出液道主动抽吸第2瓶内的液体,使阀门室内的空气被动进入第2瓶内,第2瓶的液体得以继续输注,换瓶成功。
2.4 产品实施
2.4.1 材料选择及成型
本输液头可以在现有输液头的基础上进行结构改造,可以适当增加输液头下部(瓶外部分)尺寸和形状以方便设计阀门室及相关通道;也可以改变手柄形状以便于握持方便;还可以适当调整进气管和出液管开口高度,使瓶内残留液体更少。输液头3D设计图以及产品的成品图,见图4。在产品加工过程中,考虑到浮球阀门加工和放置的问题,可以在输液头阀门室预先开窗来处理。在材料选择方面,输液头主体可以选择普通医用塑料,但浮球阀门的选材很关键,经本团队成员广泛查阅相关资料,发现选择相对密度为0.83的聚甲基戊烯为最好,其安全可靠,本身也可用于医疗器械及食品容器,其次可以选择相对密度0.85~0.91聚丙烯,其价格便宜,易于加工。不管选择哪种材料做浮球阀门,如能做成中空的最好。
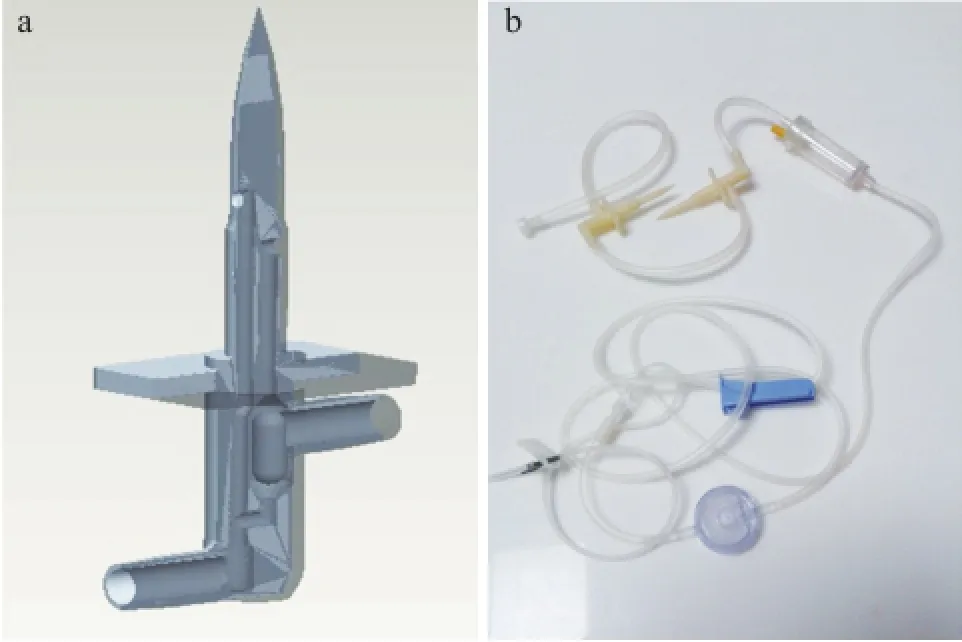
图4 输液头的3D设计图(a)和产品成品图(b)
2.4.2 细节处理
为了使浮球阀门随着浮力增加而关闭愈紧可以把阀门室的上下端的截面设计成三角形,而浮球阀门的上下端设计为半球形;阀门室侧面的开口即入口位置较高,可以防止输注当前液体瓶时液体经底部开口处返流,即当返流液体在阀门室内积聚接近入口底部时,阀门浮起,阻断空气进入而暂停瓶内输液输注,残留在阀门室内的液体则继续向后方流动,导致液面降低,避免返流。当液面进一步降低后阀门下降,空气进入瓶内,瓶内液体又开始输注,整个过程使瓶内的液体呈脉冲式输注;阀门室侧面入口的直径应大于其底端的开口;应设计一个便于固定的装置,便于在使用过程中保持输液头近似垂直;设计一个保护套用以保护输液头插入部分,且保护套在对应气体通道的开口处预留一排气孔,排气孔外有一软瓣膜保护。
2.5 浮球阀门的相关函数推导
2.5.1 定变量分析
在分析相关变量之前先设定一些定量,我们设定浮球为中间一个圆柱加上两端两个同样半径的半球构成,浮球阀门室为中央一个圆柱体加上两端两个同半径的圆锥体构成。重力加速度为g,输注的液体密度ρ0≈1,浮球分为空心和实心两种。
浮球及浮球阀门室在设计中要考虑的变量有:浮球阀门的相对密度ρ1,浮球中间的圆柱及两端半球的半径均为r,中间圆柱的长为h0;阀门室中间的圆柱及两端圆锥体的半径均为R,圆柱的长为L0,圆锥的高为H。浮球阀门的体积为v,浮球阀门室的体积为V。阀门室中间圆柱部分从圆柱底部到入液气管开口下缘的长度为h1。浮球阀门所受的浮力为F,浮球阀门的重力为G。当浮球为空心时,空心的浮球阀门浮球中间的圆柱及两端半球的内半径均为r’,中间圆柱的长仍为l。
2.5.2 浮球密度与阀门室液面高度的关系函数推导
当浮球为实心浮球时,阀门室内液体掩盖阀门的实际高度h相对应的函数关系推导如下[9-11]:

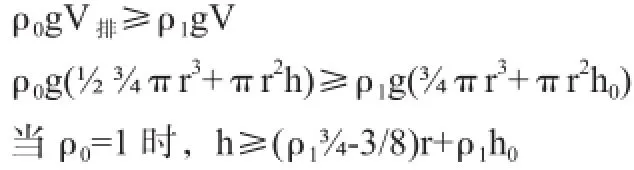
当阀门室内液体掩盖阀门的高度h与浮球阀门的相对密度ρ1、总高度h0及半径r均有关系,即当h≥(ρ1¾-3/8) r+ρ1h0时浮球开始上浮。可以看出,假如浮球阀门的相对密度为0.5,则h=0.5h0,即阀门室内液体掩盖浮球阀门一半高度的时候,浮球开始上浮。
当浮球为空心浮球时,阀门室内液体掩盖阀门的实际高度h相对应的函数关系推导如下:
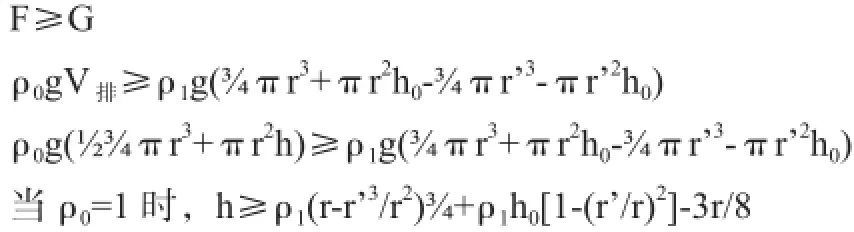
结论:当浮球阀门为空心浮球时,阀门室内液体掩盖阀门的高度h与浮球阀门的相对密度ρ1、总高度h0及外半径r及内半径r,均有关系,即当h≥ρ1(r-r’3/r2)¾+ρ1h0[1-(r’/ r)2]-3r/8时浮球开始上浮。同样地,假如浮球阀门的相对密度为0.5,r’=0.5r,则h=3r/64+3h0/8,即阀门室内液体掩盖浮球阀门高度为3r/64+3h0/8的时候,浮球开始上浮。
2.6 使用说明
使用时按以下步骤进行:
(1)排气操作。先把第1个输液头插入第1瓶液体内,这时,其余待用的输液头全部用保护套套好,且用支架固定在第1个输液头上,让它们基本保持垂直。然后在第1、2个输液头的连接软管内施加负压(挤压然后封闭固定远端即可),第1瓶内的液体在该负压的作用下打破原双开口的气压平衡后进入连接管,同时空气开始进入第1瓶液体内。这时液体一边往第2个输液头流动,一边经第2个输液头的导气管排气。当液体进入第2个输液头的阀门室内后,阀门上浮封闭导气管,液体通过第2个输液头底端通道继续流向第3个输液头,第3个输液头同样地先经导气管排气,排气完成后由阀门控制其液体经底部通道流出,液体最后经墨菲氏滴管后进入穿刺针内。这一步过程虽复杂,但并没有增加护士额外的排气的操作。
(2)按照意愿加挂液体。护士可以在完成第一步后一次性地全部加挂好所有的液体瓶(取下保护套,把输液头插入瓶内即可),也可以先空着,只要在前一瓶滴完之前挂上就行。挂几瓶、留几瓶,什么时候补挂全都由护士自行安排,避免患者或家属的集中呼叫。
(3)多轮使用方法。即有时患者输注液体瓶数较多,而一根产品只有3~4个输液头,当输完这3~4瓶时该如何操作。首先,应当在这一轮最后一瓶输注完毕后立即关闭墨菲氏滴管后的总阀门(保持该输液头后面的管道内有液体),然后取下第1瓶的空瓶换上新的液体瓶,其后的空液体瓶取下后用保护套套好,并用支架固定好,再重复(1)的排气操作即可。
2.7 建模研究
为了直观地反映其自动换瓶工作原理及过程,特建造一个模型,并在该模型的4个开口(分别是入气液管口、导液口、出液气管口)中的3个开口处均安置一个流速感应器(除了导气管,因为其始终没有液体经过,为了避免多条线重叠而省略)。模拟多瓶输液,观测并记录第2瓶以后任意一瓶输液头的各开口的流速及时间变化曲线。
3 结果
为了记录方便,研究时以换瓶时间为中点,向前向后扩大3 s为记录换瓶时间,然后以时间为横坐标,以流速为纵坐标,绘制其自动换瓶前后各管口流速变化曲线图,见图5。
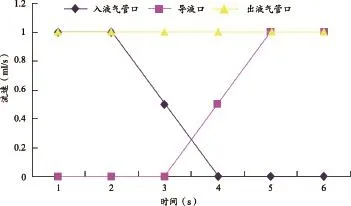
图5 自动换瓶前后各管口流速变化曲线图
可以看出,第1~2 s该输液头仅提供通道,入量=出量。出液气管口其流速始终没有变化,说明该管口没有断流。入气液管口流速先降低,而导液管内这时还没有液体(因浮球阀门还没有下沉),但由于阀门室内残留液体补充,因此出液气管口流速不变。随后导液口开始流经液体,说明浮球阀门已经下沉空气进入输液瓶内。从图表可以看出,浮球阀门发挥作用的时间在第2~3 s内。
4 讨论
相比于其他物理原理控制的自动换瓶装置,通过实验,证明本产品从理论到实践完全可行,且结构简单(只改变输液头底部结构),可靠性高,使用方便。产品加工工艺简单,原材料消耗较少。相比于其他电子智能控制的自动换瓶装置,本产品的优势更加明显,如体积小,移动方便;不耗电,救护车内也可应用;一次性使用,可靠性高,不用担心产品故障;成本低廉,个体诊所也可以应用。但使用时要注意一些小的细节,如排气操作中的气体通道的开口要通畅,始终要保持近似垂直等[12-13]。另外相比于电子智能控制的自动换瓶装置,在液体输注完成后不能自动停止输液也是本产品最大的缺陷,而电子控制的自动换瓶装置一般都可以自动终止或报警[14]。
本产品由于满足了3方面的需求,即护士需求(减轻劳动强度)[15]、医院领导需求(提升效益,减少护患纠纷)、患者需求(免于输液照看,不影响其休息),再加上结构简单、成本低廉、方便可靠等特点,可以断定在不久的将来必定会取代当前广泛使用的普通输液器[16]。
[1] 沈颖惠,刘玮.医用输液自动换瓶仪:中国,201110356253.9[P]. 2013-04-24.
[2] 刘玮,沈颖惠,米明,等.一种医用输液自动换瓶装置的研究[J].临床医学工程,2014,9(21):1087-1088.
[3] 沈颖惠,刘玮.输液头及自动换瓶系统:中国,2015100843917.2 [P].2015-11-30.
[4] 龙宏元.压差式免看护自动换瓶输液器与监护系统:中国,020 1410008179.5[P].2014-04-09.
[5] 刘玮,沈颖惠,米明,等.几种常见医用输液自动换瓶装置的比较研究[J].临床医学工程,2015,2(22):527-528.
[6] 钱志余,王淑瑾.一种具有自动换瓶与安全保护的输液装置:中国,201210513029.0[P].2013-02-20.
[7] 沈颖惠,刘玮.一种自动控制液气体分时相输入的双通道输液头:中国,201210408974.4[P].2013-09-25.
[8] 沈颖惠,刘玮.一种自动控制液气体分时相输入的双通道输液头:中国,201220547602.5[P].2013-04-03.
[9] 王雨,郑荣,武建国.基于浮力调节系统的AUV深度控制研究[J].自动化与仪表,2015,30(4):6-10.
[10] 周俊,卢海洋,胡庆玉,等.UUV浮力调节控制器的设计[J].水雷战与舰船防护,2014,(4):81-83.
[11] 赵文德,李建朋,张铭钧,等.基于浮力调节的AUV升沉运动控制技术[J].南京航空航天大学学报,2010,42(4):411-417.
[12] 范雪茹.静脉输液治疗过程中输液工具选择及其影响因素研究分析[D].太原:山西医科大学,2016.
[13] 王新花,严金莲.巧排输液瓶内气体[J].护理研究,2008, (s2):127.
[14] 谢贞.美国2006版《输液治疗护理实践标准》摘登(二)[J].中华护理教育,2007,4(5):F0002.
[15] 李婷婷.中国医院协会召开座谈会呼吁关注及保障护士合法权益[J].中国护理管理,2012,(6):96.
[16] 刘玮,沈颖惠,米明,等.医用输液自动换瓶装置的市场需求调查及分析[J].岳阳职业技术学院学报,2015,(2):81-83.
本文编辑 袁隽玲
Study of a Automatic Bottle Change Device Based on Float Valve Control
LIU Wei, SHEN Ying-hui, ZOU Jin, HUANG Qian, BO Dan-xia, ZHANG Fan
Department of Basic Medicine, Yueyang Vocational and Technical College, Yueyang Hunan 414000, China
ObjectiveTo develop a medical infusion automatic bottle change device that was physical principle controlled and was without power consumption so as to alleviate the workload of clinical nurses.MethodsFirstly, the advantages and disadvantages of each automatic bottle change device guided by physical principle were analyzed. Then, the core principles of fl oat valve control, locus control and technical diff i culties were found out. The function of relevant indicators of fl oating ball and fl oat valve chamber was deduced. Based on the derived results, suitable parameters including medical material selection, shape and size of fl oat valve, size of the valve chamber and each open position were decided and fi nal design was determined.ResultsThrough modeling and verif i cation fl oat valve, functions like liquid control, gas phase time-sharing and channeled infusion were realized.ConclusionThe structure of this automatic bottle change device controlled by fl oat valve is simple. The cost of it is low. In addition, it is easy to use, as well as safe and reliable. It provides a new solution for automatic bottle change device of soft bag injection and the mixed infusion of soft bag and hard bottle.
physical principle; fl oat valve; medical infusion; soft bag injection; automatic bottle change device
R472
A
10.3969/j.issn.1674-1633.2017.04.013
1674-1633(2017)04-0046-04
2016-04-22
2016-05-09
湖南省教育厅一般资助项目(16C1636)。
作者邮箱:yyzylw@163.com
