基于纹理特征与区域生长的高分辨率遥感影像分割算法
2017-04-28苏腾飞张圣微李洪玉
苏腾飞, 张圣微, 李洪玉
(内蒙古农业大学水利与土木建筑工程学院,呼和浩特 010018)
基于纹理特征与区域生长的高分辨率遥感影像分割算法
苏腾飞, 张圣微, 李洪玉
(内蒙古农业大学水利与土木建筑工程学院,呼和浩特 010018)
影像分割是面向对象影像分析中的重要步骤。为了提高高分辨率遥感影像(high-resolution remote sensing image,HRI)分割算法的性能,提出一种新的影像分割算法,包含种子确定、基于种子区域生长(seeded region growing,SRG)的过分割(advanced SRG,ASRG)和层次区域生长(hierarchical region growing,HRG)3个步骤。利用Gabor纹理特征定义纹理均匀性,将种子自动放置在HRI中同一纹理组成区域的中心位置; 在SRG阶段,将HRI光谱信息与斑块形状信息相结合,提出了一种新的合并规则,以提高SRG过分割的精度与分割结果中各个斑块排列的紧凑性; 在HRG阶段,提出了一种自适应的阈值,可以更好地保持多尺度分割的特性; 在实验部分,采用3景HRI验证了上述方法。利用监督的影像分割评价方法定量评价了该方法的分割精度,并与另外2种主流的遥感影像分割算法进行了对比。结果表明,该方法可以得到令人满意的分割效果。
纹理特征; 种子区域生长(SRG); 层次区域生长(HRG); 高分遥感影像(HRI); 影像分割
0 引言
随着遥感技术的不断进步,越来越多的传感器可提供高分辨率遥感影像(high-resolution remote sensing image,HRI),如QuickBird,IKONOS,GeoEye,OrbView等[1-2]。影像分割是HRI解译的关键步骤[3-6]。HRI分割算法可大致分为基于边界的分割和基于区域的分割2类。第一类算法主要利用边缘检测算法提取影像中的区域边界,例如Sobel,Prewitt和Canny算子[7],这类方法运算较快,但难以直接提取闭合的边界线。主动轮廓线模型[8]将边界提取与曲线演化理论相结合,以期克服上述困难; 但其代价是较大的计算负担和难以同时获取多个区域的轮廓线,且其精度也易受初始化的影响。与第一类算法相比,第二类算法受到更多学者的青睐,近年来也出现了较多的相关研究,包括区域生长[1,3,4-6,9-12]、马尔科夫场[12-14]、模糊C均值聚类[14-15]、正规化分割[16]、均值漂移[16-17]、多主体[1]以及基于直方图与线性回归的影像分割[18-19]等。虽然基于区域生长的影像分割历史较长,却在近年来受到更多关注,其中,种子区域生长(seeded region growing,SRG)和层次区域生长(hierarchical region growing,HRG)是2个重要分支。
SRG最初被当作一种半自动的影像分割算法[20],因其主要包括种子确定和种子生长2个步骤。在第一步中,种子的数目和位置通常需要人为给出,这极大地降低了SRG的自动化程度。为了消除这一弊端,Lee[21]采用了等间隔放置种子的方法首先获取过分割,再合并过分割的区域。若种子被放置在影像的边界处,则相邻的区域可能被错误地合并。Fan等[22]利用影像边界信息来优化种子位置; Evans等[23]利用正则变换从Landsat“农田”影像中提取种子的数目和位置。以上方法的1个隐含假设是: 影像中的各个区域应至少包含1个种子,并且种子应该被放置在区域的中心位置。但对于一些具有较大尺度纹理的区域,仅利用影像边界信息难以达到这一目的,因为影像边界对应的是影像中灰度变化较大的区域,而一些纹理区域(尤其是尺度较大的纹理)也具有较大的灰度变化。例如,HRI中的一片茂密的森林本应被完整地分割出来,但因其灰度变化较大,基于边界的种子确定方法难以将种子放置在森林区域中,会造成亚分割错误。针对上述问题,本文提出了一种基于纹理特征的种子确定方法。
除了种子位置的确定,种子数目的确定也是较为困难的。种子数目过多易导致过分割; 反之易导致亚分割。在区域生长中,过分割可通过区域合并来消除; 亚分割则可通过区域分裂来减少。但在实现上,区域合并比区域分裂更为简单。因此,本文首先过多地设置种子数目,再通过区域合并消除过分割。实际上,种子数目的确定与HRG尺度的选择有相似之处: HRG中较大的分割尺度对应较大尺度的地物,反之对应较小尺度的地物。
HRG一般采用自底向上的策略,通过合并将地物分割出来。为了保证分割的准确性,优先合并最为相似的区域。HRG中的尺度参数与其合并标准的阈值是对应的。大阈值会产生更多合并,得到大尺度的分割结果,但易导致错误的合并(即亚分割错误); 反之,小阈值会限制合并次数,使大尺度的地物被过分割。综上,HRG的合并标准和尺度选择是关键。Martain等[11]基于HRG提出了分形网演化算法(fractal net evolution algorithm,FNEA),它将影像的灰度和形状异质性作为合并标准。FNEA的另一个重要贡献是,在合并规则中引入了“相互最适合(mutual best fit,MBF)”,显著提高了分割精度。Zhong等[1]利用多主体进一步改进了FNEA的合并规则; Zhang等[3]借鉴了FNEA实现的细节,并将边界信息加入到合并标准中。在基于FNEA的算法中,灰度和紧致异质性都被简单地相加,这是缺少理论依据的。因此,本文在设计合并标准时提出了更为合理的方法。
1 算法原理
本文算法包含3个步骤: ①基于纹理特征的种子确定; ②基于SRG的过分割; ③HRG。图1示出本文方法的流程图。
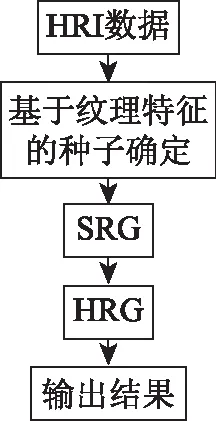
图1 本文算法流程图
1.1 基于纹理特征的种子提取
1.1.1 纹理特征提取
纹理特征是影像中的重要信息。描述纹理特征的方法有很多,其中最常用的有基于统计的和基于结构的纹理特征描述方法。前者由Haralick等[24]提出,后者则基于Gabor滤波[25]。本文采用Gabor滤波方法提取HRI中的纹理特征。
基于Gabor的纹理特征提取是通过多通道滤波实现的。二维Gabor核函数包括实数部分Greal和虚数部分Gimag,其计算公式[25]为
(1)
式中:σ和θ分别为核函数的尺度和方向;i和j分别为二维核函数中水平和垂直方向的位置。
分别利用Greal和Gimag对原影像进行卷积运算,得到滤波结果R和I,则对应尺度σ和方向θ的纹理特征T(σ,θ)的计算公式[25]为
T(σ,θ)=R2(σ,θ)+I2(σ,θ)。
(2)
影像中往往包含不同尺度和不同方向的纹理,为了将其区分开,需要利用多个尺度和方向计算出Gabor核函数,得到多个纹理特征。需要的Gabor滤波器数目等于Nθ·lb(Nwidth/2)[25],其中Nθ为方向θ的数目,Nwidth为影像的宽度。对于1景宽度为512的HRI,若选用6个方向(各方向的间隔为π/6),则需42个Gabor滤波器。
在计算出各个尺度和方向的纹理特征量后,还需对其进行平滑滤波; 平滑滤波可以提取Gabor滤波结果中的对比度和强度信息,并消除灰度变化较大的信息。值得注意的是,平滑滤波器的尺度越大,其滤波结果中不同纹理特征量的对比度越明显,但也会降低不同纹理区域的边界信息。因此,选用合适尺度的平滑滤波器是非常重要的。
1.1.2 种子确定
从HRI中可清晰地捕捉地物细节,其中一些尺度较大的纹理会被一般的边界检测算法确定为边界,从而难以准确地提取纹理区域的种子位置。本文试图将纹理区域的种子放置在靠近区域中心的位置。为了实现这一目的,首先定义了纹理均匀性(textural homogeneity),即
(3)
式中:HT(pi,j)为像素pi,j的纹理均匀性,表示在以像素pi,j为中心的区域内其纹理特征的均匀程度;i和j分别为像素的行和列号;W为以像素pi,j为中心的窗口大小;w为该窗口中像素的索引值;NT为纹理特征数目;t为纹理特征的索引值;σwt为第t个纹理特征图像中以像素w为中心、大小为W的窗口的图像区域的标准差。根据式(3)的定义,本文种子位置的计算公式为
(4)
式中:W为滑动窗口;x和y分别为种子位置的行和列号; argmin为取最小值函数。
在SRG中,种子之间应具有尽量大的间隔,以保证分割结果中各个区域的紧致性。本文对式(4)进行改进,使种子的位置尽量靠近滑动窗口W的中心,即
(5)
式中: (i0,j0)为滑动窗口中心的位置;D为距离系数,其值与像素和滑动窗口中心的距离大小成正比,定义为
Di0,j0(i,j)=exp[-(d/d0)-1],
(6)
d=[(i-i0)2+(j-j0)2]1/2
(7)
式中:d为像素(i,j)到(i0,j0)的距离;d0为滑动窗口中像素与窗口中心距离的最大值。
从HRI中提取纹理特征需要经过大量计算。为了在保证精度的前提下降低计算量,可利用主成分分析[26](principle component analysis,PCA)降低纹理特征的维度。因此,在本文的种子确定计算之前,先利用PCA降低纹理特征的维度。
图2示出本文方法利用和未利用PCA降维所提取的种子位置。该图大小为200像素×200像素。选取的滑动窗口的大小为20像素×20像素,从5个尺度、8个方向分别提取3个波段(RGB)的纹理特征,共得到120个特征量,对其进行PCA变换。PCA结果中最大的8个分量占据了全部特征量的90%。图2(b)和(c)分别是未利用和利用PCA的种子确定结果,对比后可看出,2个结果基本一致。这说明采用PCA降维可在保证精度的前提下,大大降低计算量。
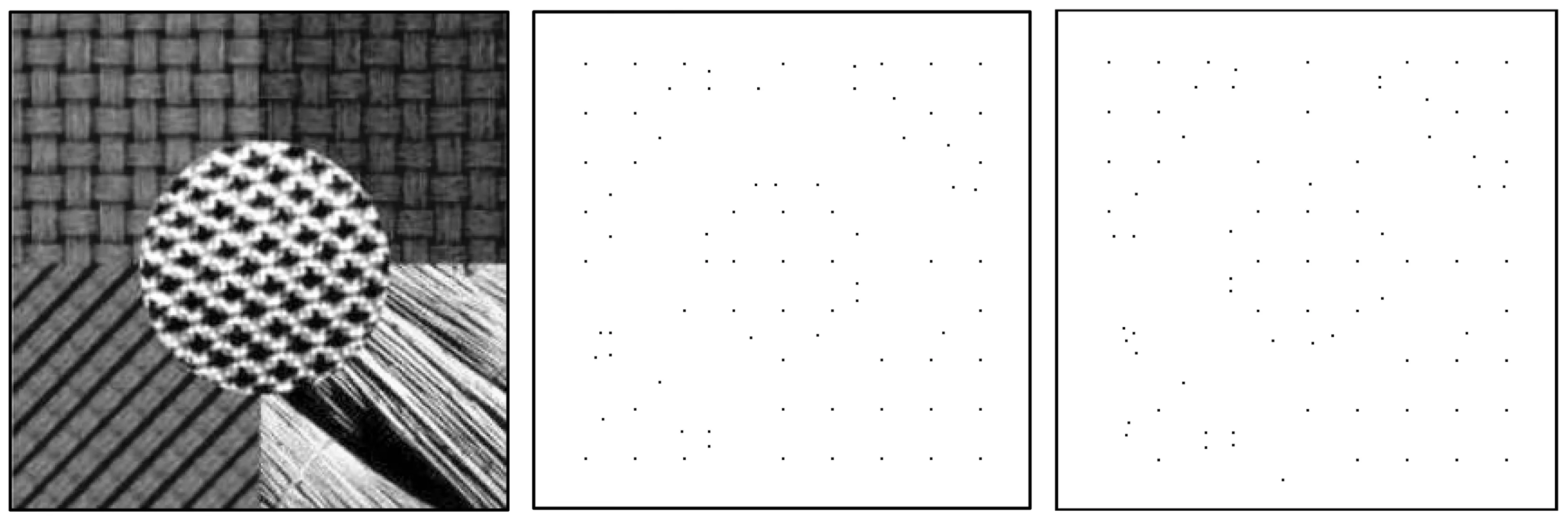
(a) 纹理图像(b) 未利用PCA的种子确定(c) 利用了PCA的种子确定
1.2 改进合并规则的SRG
1.2.1 SRG算法流程
利用1.1节中的方法获取的种子,执行SRG算法来获取过分割结果。与传统SRG不同的是,本文优先合并在光谱上更为相似的区域,以进一步保证分割的正确性。本文SRG算法的流程如下:
1)设定阈值TSRG,输入种子列表;
2)按照1.2.2节的合并规则,为每一个种子找到最适合合并的像素,将其输入到队列中;
3)对队列中的元素进行排序,光谱异质性变化量小的排在队列的前面;
4)按照队列的顺序,将像素与其所对应的种子进行合并;
5)若影像中没有其他像素,则输出过分割结果; 否则返回到步骤2)。
其中步骤2)可能发生的情况是: 某一像素被同时确定为2个不同种子的最适合合并的像素,这会导致步骤4)合并操作出错。因此需要每次合并前检查该像素是否已被合并; 若已被合并,则放弃合并。在初始阶段,由于各个种子相距较远,这种情况不会发生; 随着种子生长,一些像素可能同时与2个种子所在的区域相邻接,才可能导致上述情况。
1.2.2 SRG合并规则
好的合并规则能有效地避免错误合并。FNEA的合并规则不仅考虑了光谱灰度,还考虑了形状信息,以得到视觉上更为优越的分割结果。其合并标准CFNEA的计算公式[11]为
CFNEA=(1-wshape)△Hspec+wshape△Hshape,
(8)
式中:wshape为形状异质性的权重,其值在[0, 1]之间; △Hspec和△Hshape分别为光谱异质性的变化量和形状异质性的变化量,其定义[11]为
(9)
式中:n为斑块包含的像素数目;σ为斑块内所有像素光谱值得标准差;l为斑块周长;b为斑块外接矩形的宽度; 下标1,2,m分别表示斑块1、斑块2和它们合并后产生的斑块。
本文在构建新的合并规则时,首先考虑光谱异质性,其次考虑形状异质性,即在确保灰度相似的前提下,利用形状信息指导合并,以产生视觉上优越的分割结果。本文SRG合并规则的步骤为:
1)设区域sa是当前待处理的区域(或种子),找到与sa相邻的所有像素,组成集合Na;
2)在Na中,计算所有像素与sa合并后的△Hspec,从中挑选在阈值TSRG以下的像素,并将其组成集合Na*;
3)在Na*中,计算所有像素与sa合并后的△Hcomp,从中选出其值最小的设为sb,即是与sa最适合合并的像素。
步骤3)中△Hcomp的计算公式[11]为
(10)
式中:l为区域周长;n为区域的像素个数;i和j分别为待合并的2个区域;m为合并后的区域。
步骤2)中的TSRG是SRG的阈值。若TSRG较小,每次合并时得到的集合Na*就会包含很少的区域(甚至是空集),从而会降低计算速度; 反之可能导致错误的合并。
1.3 基于GMBF的HRG算法
全局相互最适合(global mutual best fit,GMBF)的合并规则最早由Martain等[11]提出,包含2部分内容: ①相互最适合,即2个区域在其各自的邻域中,都是对方最适合合并的区域; ②全局最适合,即在图像内的所有邻域中,找出一对最符合合并标准的邻域。GMBF的目的是得到符合某个合并标准的最佳分割结果。本文中GBMF利用的合并标准是光谱异质性。
在基于GMBF的HRG区域合并中,只有2个区域的光谱异质性变化量小于一个阈值时才允许其合并,本文将该阈值与区域大小相关联,其计算公式为
THRG(i,j)=γ2log(ni+nj),
(11)
式中:i和j分别为2个待合并的区域;γ为调节系数;n为区域的像素数目;THRG为一个局部动态阈值,对于尺度较大的区域,THRG较大。
式(11)采用对数函数是为了使THRG随区域增大而增大的速度较小。用户可通过调节γ来得到合适尺度的分割结果。
2 实例验证
为了验证本文算法,共采用3景OrbView3 HRI进行分割实验(表1)。将3景影像分别简称为S1,S2和S3。

表1 OrbView3分割实验数据
3景影像各具特点,要将其中所有地物都完整分割出来是较为困难的。为了定量地评价本文算法的分割精度,利用了一种监督的影像分割评价方法[5]。该方法需要将本文算法的分割结果与专家手动分割得到的参考分割结果(图3(d)(e)(f))进行对比,计算出查准precision(p)和召回recall(r)值。当且仅当p和r都接近1时,分割结果和参考结果最相似。该方法还定义了变量f=pr/(p+r),以消除p不能反映过分割错误和r不能反映亚分割错误的弊端。f越接近1,分割效果越好。
本文算法需要的参数有: Gabor滤波参数、种子间隔ls、主成分分析(PCA)降维数、SRG合并阈值TSRG以及HRG合并阈值γ。其中,Gabor滤波参数的设置参考了文献[25]; PCA降维数被自动设置为最大分量占总变化90%时的个数; 其余的参数均需根据不同的影像来设置。
本文方法主要分为种子确定、SRG和HRG等3个阶段,前2个阶段可被视为基于SRG的过分割算法,第3阶段是在过分割的基础上利用HRG对相似区域进行合并的过程。为了充分验证本文方法,分别进行了本文过分割算法(advanced SRG,ASRG)和整体分割算法的实验。实验采用的3景HRI影像与专家手动分割结果见图3。S1(图3(a))是城市地区的HRI,其中包含建筑、操场、道路、植被、阴影等多种地物,各种地物具有不同的尺度、形状和纹理特征。S2(图3(b))是乡村地区的HRI,主要包含多片尺度相差较大的农田。S3(图3(c))是海岸带HRI,与S1和S2不同的是,它包含了海水和农田。

(a) S1(城市) (b) S2(乡村)(c) S3(海岸带)

(d) S1分割结果 (e) S2分割结果(f) S3分割结果
2.1 对过分割算法的验证实验
这一实验考察的是本文基于SRG的过分割算法ASRG,主要有2个目的: ①验证ASRG中基于纹理特征的种子确定方法; ②验证ASRG中改进的合并规则。对于目的①,将ASRG与基于边界强度设置种子位置的ESRG(edge-strength SRG)[27]进行了对比; 对于目的②,对比了利用FNEA合并规则的FSRG(FNEA-SRG)。ASRG与FSRG的种子设置方法相同,但合并规则不同。
由于这一实验是验证过分割算法,因此只需计算分割结果的p值,以定量评价算法性能。对于S1和S2,3种算法都将种子间隔ls设置为15; S3的尺度相对较大,所以3种算法都将ls设置为20。对于本文方法,3景实验影像的TSRG都设置为30。
图4是ASRG与ESRG的种子确定结果。
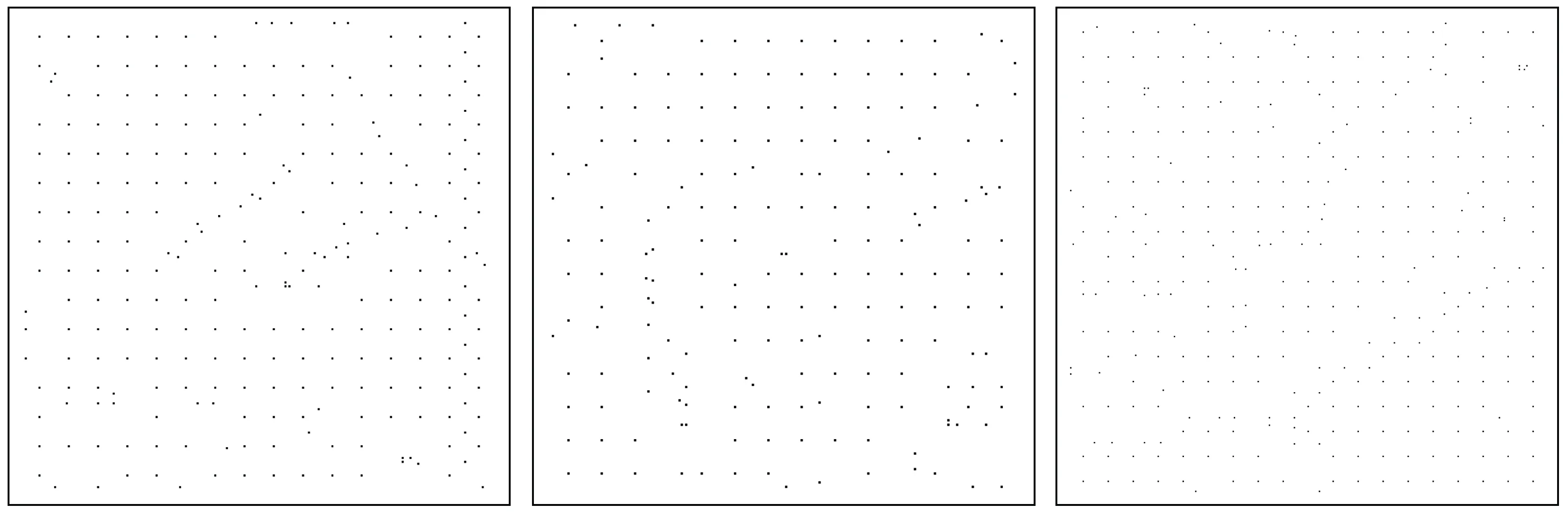
(a) S1(ASRG)(b) S2(ASRG) (c) S3(ASRG)
(d) S1(ESRG)(e) S2(ESRG) (f) S3(ESRG)
从图4中ASRG的结果可以看出,在区域边缘,种子点是较为稀疏的(如图4(c)中的海陆边界); 大部分种子都在靠近区域中心的位置(如图4(a)中央的操场)。由于本文方法考虑了Gabor纹理特征,一些种子在纹理区域得到了较好的设置(如图4(c)西北部的村庄)。虽然ESRG也得到了与ASRG较为相似的结果,但其种子位置的排列明显不规则,且一些种子并未很好地设置在区域中心(如图4(a)中的操场和图4(e)中的西南部农田)。
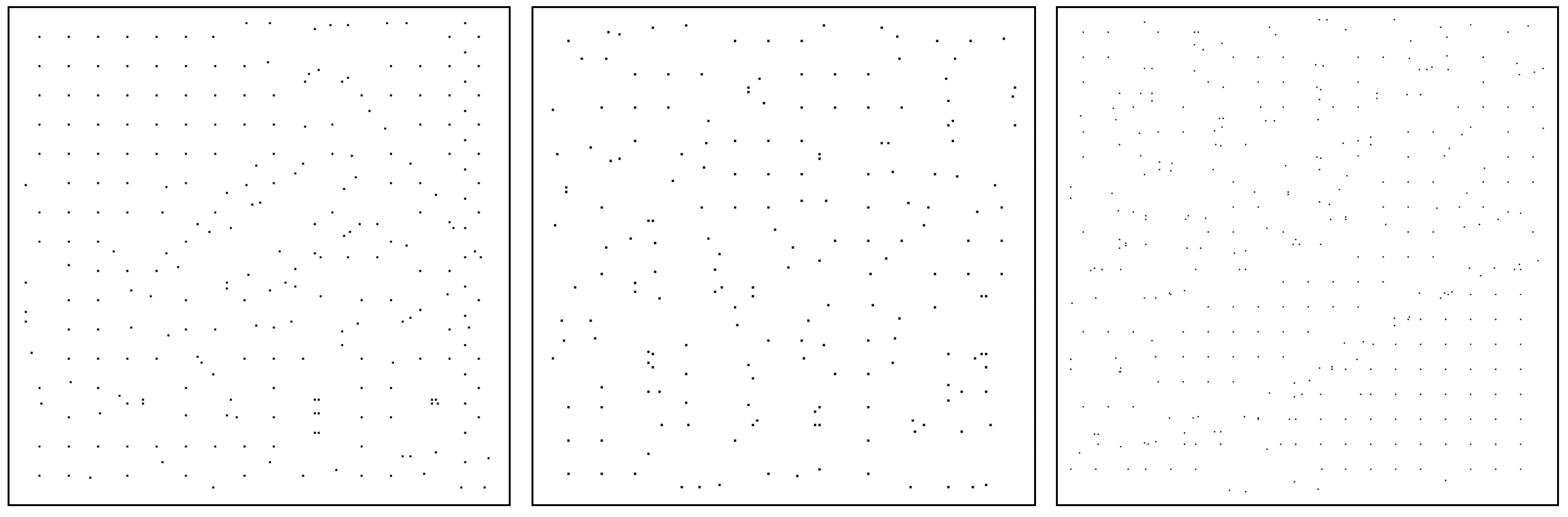
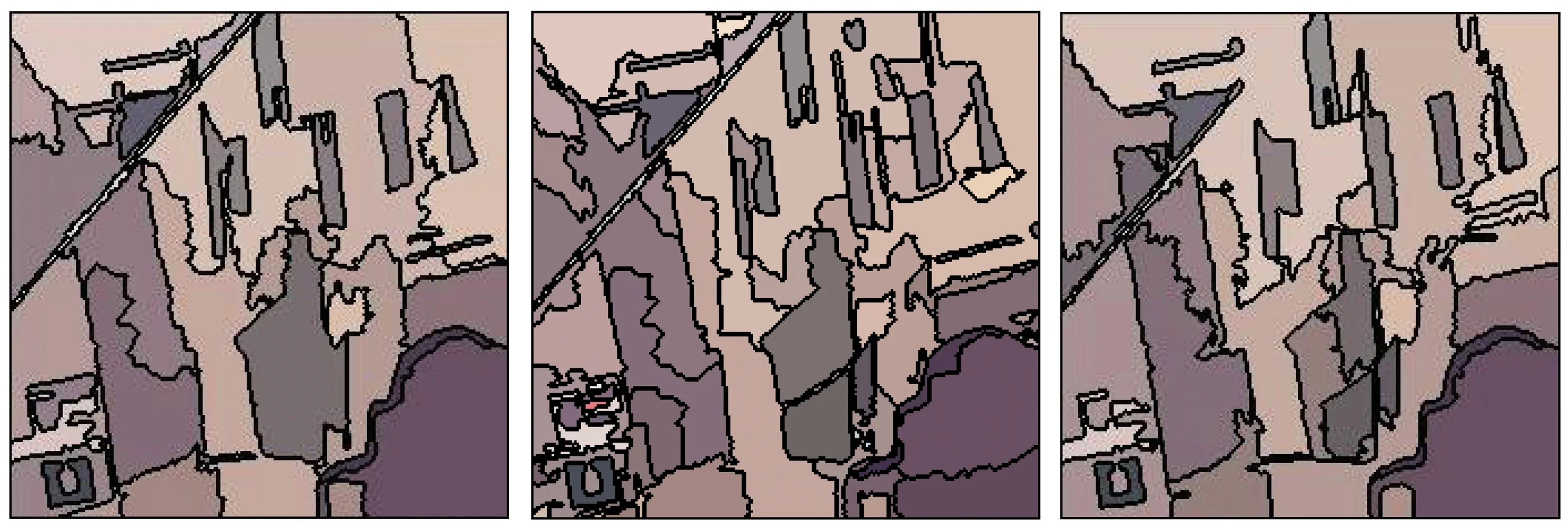
图5显示了3景影像的过分割结果。
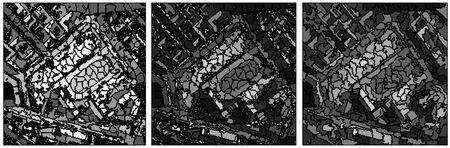
(a) S1(ASRG)(b) S1(ESRG) (c) S1(FSRG)
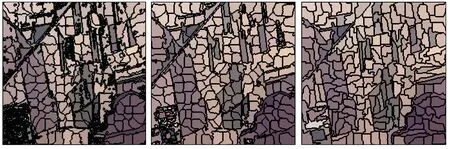
(d) S2(ASRG)(e) S2(ESRG) (f) S2(FSRG)
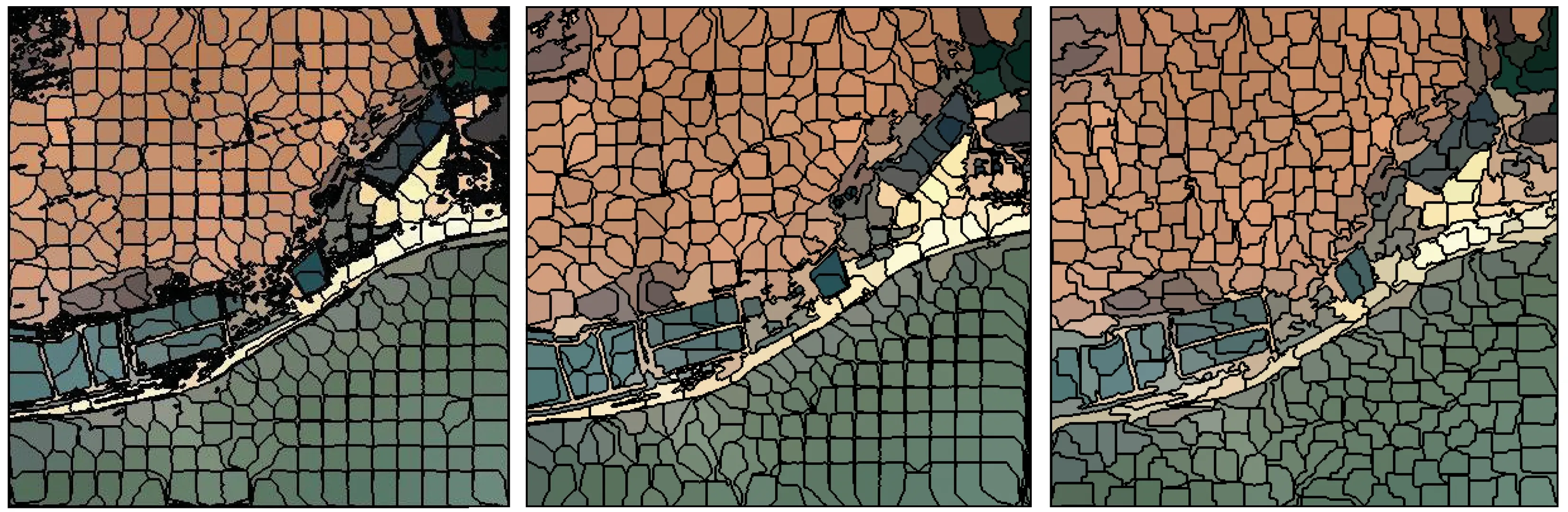
(g) S3(ASRG)(h) S3(ESRG) (i) S3(FSRG)
从图 5可以看出,ASRG可得到视觉上更为优越的过分割。ESRG仅考虑了边界信息,因此对于一些纹理尺度较大的区域(如图5(h)北部的农田),种子位置排列在视觉上较为散乱,其过分割的各个斑块也难以反映农田区域的结构。反之,图5(b)和(e)的结果与(a)和(d)相差较小,这也在表2定量精度评价中得到了体现: 对于3景影像的p值,ASRG最高,ESRG次之,FSRG最低。虽然FSRG在合并规则中考虑了光谱与形状信息,但该算法只是将二者进行了简单的加和; 所以在FSRG的结果中,各区域的边界之间出现了错误的斑块(如图5(c)中的操场与周围区域被错误地合并)。
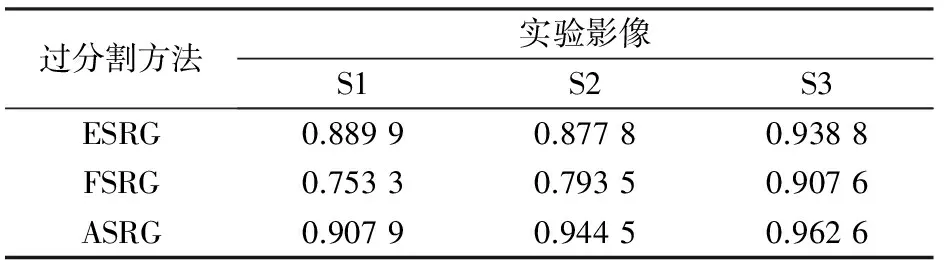
表2 3种过分割方法结果的p
ASRG的优势可被归纳为2个方面: ①得益于基于纹理特征的种子确定方法,过分割结果中各个区域的边界被很好地保持下来; ②由于ASRG的合并标准较FSRG更为合理地整合了灰度与形状异质性,ASRG分割结果中各个斑块的形状美观、排列整齐,这便于后续处理。实验表明,ASRG的种子确定方法和改进的合并规则都有利于提高过分割算法的精度和视觉效果。
2.2 对整体分割算法的验证实验
为了验证本文整体分割算法(advanced HRG,AHRG)的精度,进行了分割实验,主要有2个目的: ①验证AHRG中的动态阈值方法; ②对AHRG与其他主流遥感影像分割算法进行对比。针对目的①,采用了固定阈值的基于GMBF的方法(simple thresholding HRG,SHRG)进行对比实验(需说明的是,AHRG与SHRG均是在本文ASRG的基础上开展HRG的); 对于目的②,采用了FNEA进行对比。FNEA的初始阶段以各个像素作为单独区域。
图6为AHRG分割结果的p,r,f随γ的变化。

(a) S1(b) S2(c) S3
选择γ的标准是f最高时所对应的值,所以S1,S2和S3的γ分别为35,30和130。通过实验确定,SHRG对于S1,S2和S3的尺度参数分别为50,40和150。对于FNEA,3景影像的形状参数均为0.1,紧致性参数均为0.5; 对于尺度参数,3景影像分别为50,45和100。
图7是3种算法对S1,S2和S3的分割结果。由图7可以看出,3种算法都将3景实验影像中的主要区域分割出来了。对比AHRG与SHRG,后者的分割结果中出现了更多过分割现象,如图7(e)中西南部较大的农田被分割成许多小区域,类似的还有图7(h)南部的海水。

(a) S1(AHRG)(b) S1(SHRG) (c) S1(FNEA)
(d) S2(AHRG)(e) S2(SHRG) (f) S2(FNEA)

(g) S3(AHRG)(h) S3(SHRG) (i) S3(FNEA)
表3也定量地反映了这一情况: SHRG的p值对于3景影像都是最高的,而r值却最低。这主要是因为SHRG中固定的阈值容易限制很多可能正确的合并,导致过分割。

表3 3种分割算法的分割精度
由表3可知,FNEA也得到了较好的分割结果,其f值较SHRG高一些,但却低于AHRG。仔细对比AHRG和FNEA的结果可以看出,对于S1和S2,AHRG相比FNEA产生了过分割,但S3的情况却相反。这可能是因为S1和S2中各个区域的大小相差较小,但S3中水塘的尺度远小于海水和农田区域。FNEA的合并规则使分割结果中各个区域的大小更为均匀。由于AHRG采用了动态阈值的方法,使光谱相似度高、尺度较大的区域也可能被合并,所以AHRG对S3分割结果的r值也较高,虽然导致一些水塘区域被错误地合并,但是从整体精度f来说,本文的分割算法更为优越。
以上实验分析均是以专家手动分割为基准的,而对3景影像的仔细观察可以发现,专家手动分割对一些尺度较大的区域进行了简化(如S3中的农田)。为了更客观地评价本文算法,将分割结果与原始影像进行了详细对比。对于S1: 图3(d)将S1中的操场西北部划分为一个完整的区域,而实际上其中的植被使得该区域的灰度出现了较大变化; 因此,图7(a)(b)(c)中在该区域的过分割,可能更接近实际情况。对于S2: 南部较大农田中间有一条道路将其分为2个区域,而图3(e)却将其归并为一个区域; 图6(d)(e)(f)中,只有(e)保留了这2个区域,因此表5的评价结果可能低估了HSRG。对于S3: 西北部的大片农田在专家解译结果中被简化为一个区域,因此表5可能高估了3种算法的性能。
综上,根据图6最高的f来选取尺度参数γ,可能并不会得到最理想的分割结果。实际上,若利用较小的γ来分割S2和S3,可能结果更为理想,很多影像细节(如S2南部的农田、S3西南的水塘等)都能被较为完整地保留下来。因此,建议用户根据实际需要来选择更为合适的γ参数。
3 结论
本文发展了一种高分遥感影像(HRI)分割算法。该方法首先利用纹理特征优化种子的确定,然后结合种子区域生长(SRG)和层次区域生长(HRG),得到不同尺度的分割结果。通过3景HRI分割实验,说明本文方法具有令人满意的分割精度。本文的主要贡献体现在:
1)在SRG部分,利用Gabor纹理特征设置种子的位置,提高了SRG的分割精度与视觉效果; 利用PCA降低纹理特征的维度,显著减少了计算量。
2)在合并标准中,采用了一种更为合理的方法整合灰度异质性和紧致异质性,从而抑制了错误合并的产生。
3)在HRG阶段,采用了动态阈值的方法,提高了HRG的分割精度。
虽然本文利用纹理特征提高了种子位置确定的效果,但尚未涉及种子数目的确定方法。在今后的研究中,将利用更多特征去除冗余的种子,以提高SRG的分割精度和速度。
[1] Zhong Y F,Zhao B,Zhang L P.Multiagent object-based classifier for high spatial resolution imagery[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(2):841-857.
[2] Bouziani M,Goita K,He D C.Rule-based classification of a very high resolution image in an urban environment using multispectral segmentation guided by cartographic data[J].IEEE Transactions on Geosciences and Remote Sensing,2010,48(8):3198-3211.
[3] Zhang X L,Xiao P F,Song X Q,et al.Boundary-constrained multi-scale segmentation method for remote sensing images[J].ISPRS Journal of Photogrammetry and Remote Sensing,2013,78(2):15-25.
[4] Tilton J C,Tarabalka Y,Montesano P M,et al.Best merge region-growing segmentation with integrated nonadjacent region object aggregation[J].IEEE Transactions on Geosciences and Remote Sensing,2012,50(11):4454-4467.
[5] Yi L N,Zhang G F,Wu Z C.A scale-synthesis method for high spatial resolution remote sensing image segmentation[J].IEEE Transactions on Geosciences and Remote Sensing,2012,50(10):4062-4070.
[6] Blaschke T,Hay G J,Kelly M,et al.Geographic object-based image analysis:Towards a new paradigm[J].ISPRS Journal of Photogrammetry and Remote Sensing,2014,87:180-191.
[7] Canny J.A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1986,8(6):679-698.
[8] Wu Q G,An J B.An active contour model based on texture distribution for extracting inhomogeneous insulators from aerial images[J].IEEE Transaction on Geosciences and Remote Sensing,2014,52(6):3613-3626.
[9] Johnson B,Xie Z X.Unsupervised image segmentation evaluation and refinement using a multi-scale approach[J].ISPRS Journal of Photogrammetry and Remote Sensing,2011,66(3):473-483.
[10]Beaulieu J M,Goldberg M.Hierarchy in picture segmentation:A stepwise optimization approach[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1989,11(2):150-163.
[11]Baatz M,Schäpe A.Multiresolution segmentation:An optimization approach for high quality multi-scale image segmentation[C]//Strobl J,Blaschke T,Griesebner G.Angewandte Geographische Informationsverarbeitung XII.Karlsruhe:Wichmann Verlag,2000:12-23.
[12]Yu Q Y,Clausi D A.IRGS:Image segmentation using edge penalties and region growing[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2008,30(12):2126-2139.
[13]Wang F,Wu Y,Zhang Q,et al.Unsupervised SAR image segmentation using higher order neighborhood-based triplet Markov fields model[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(8):5193-5205.
[14]Zhang P,Li M,Wu Y,et al.Unsupervised multi-class segmentation of SAR images using fuzzy triplet Markov fields model[J].Pattern Recognition,2012,45(11):4018-4033.
[15]Bitam A,Ameur S.A local-spectral fuzzy segmentation for MSG multispectral images[J].International Journal of Remote Sensing,2013,34(23):8360-8372.
[16]Tao W B,Jin H,Zhang Y M.Color image segmentation based on mean shift and normalized cuts[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2007,37(5):1382-1389.
[17]Michel J,Youssefi D,Grizonnet M.Stable mean-shift algorithm and its application to the segmentation of arbitrarily large remote sensing images[J].IEEE Transactions on Geoscience and Remote Sensing,2015,53(2):952-964.
[18]Yuan J Y,Wang D L,Li R X.Remote sensing image segmentation by combining spectral and texture features[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(1):16-24.
[19]Yuan J Y,Wang D L,Li R X.Image segmentation using local spectral histograms and linear regression[J].Pattern Recognition Letters,2012,33(5):615-622.
[20]Adams R,Bischof L.Seeded region growing[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1994,16(6):641-647.
[21]Lee T C M.Some Models and Methods for Image Segmentation[D].Macquarie:Macquarie University,1997.
[22]Fan J P,Yau D K Y,Elmagarmid A K,et al.Automatic image segmentation by integrating color-edge extraction and seeded region growing[J].IEEE Transactions on Image Processing,2001,10(10):1454-1466.
[23]Evans C,Jones R,Svalbe I,et al.Segmenting multispectral Landsat TM images into field units[J].IEEE Transactions on Geoscience and Remote Sensing,2002,40(5):1054-1064.
[24]Haralick R M,Shanmugam K,Dinstein I.Textural features for image classification[J].IEEE Transactions on Systems,Man,and Cybernetics,1973,3(6):610-621.
[25]Sivalingamaiah M,Reddy B D V.Texture segmentation using multichannel Gabor filtering[J].IOSR Journal of Electronics and Communication Engineering,2012,2(6):22-26.
[26]Farrell M D,Mersereau R M.On the impact of PCA dimension reduction for hyperspectral detection of difficult targets[J].IEEE Geosciences and Remote Sensing Letters,2005,2(2):192-195.
[27]Levinshtein A,Stere A,Kutulakos K N,et al.TurboPixels:Fast superpixels using geometric flows[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2009,31(12):2290-2297.
(责任编辑: 邢宇)
Segmentation algorithm based on texture feature and region growing for high-resolution remote sensing image
SU Tengfei, ZHANG Shengwei, LI Hongyu
(WaterConservancyandCivilEngineeringInstitute,InnerMongoliaAgriculturalUniversity,Hohhot010018,China)
Image segmentation plays an important role in object-based image analysis. In order to enhance the performance of segmentation method for hierarchical region growing (HRG),this paper proposes a new image segmentation algorithm. The new method consists of three steps: seed determination, seeded region growing (SRG)based over-segmentation (advanced SRG, ASRG) and HRG. To improve the automation and precision of seeds determination, the authors used Gabor texture feature and defined textural homogeneity, attempting to place the seeds at the center of the regions composed of the same texture. At the stage of SRG, spectral information of HRI was combined with shape cues to form a new merging rule to raise the segmentation accuracy and segments compactness of SRG over-segmentation. At the HRG step, an adaptive threshold was used to better retain the multi-scale segmentation property. In the experiment, three scenes of HRI were utilized to validate the proposed method. A supervised segmentation evaluation method was adopted to quantitatively assess the segmentation accuracy of the proposed algorithm, and two state-of-the-art segmentation methods were compared with the proposed method. The experimental results show that the new algorithm proposed in this paper can produce satisfying segmentation.
texture feature; seeded region growing (SRG); hierarchical region growing (HRG); high-resolution remote sensing image(HRI); image segmentation
10.6046/gtzyyg.2017.02.11
苏腾飞,张圣微,李洪玉.基于纹理特征与区域生长的高分辨率遥感影像分割算法[J].国土资源遥感,2017,29(2):72-81.(Su T F,Zhang S W,Li H Y.Segmentation algorithm based on texture feature and region growing for high-resolution remote sensing image[J].Remote Sensing for Land and Resources,2017,29(2):72-81.)
2015-05-05;
2015-06-24
国家自然科学基金项目“科尔沁沙地典型生态系统水热通量传输机理及其与植被耦合关系试验和模拟研究”(编号: 51569017)、“内蒙古典型草原水文过程及其扰动与触发草地退化的水文临界条件实验与模拟研究”(编号: 51269014)和中国博士后科学基金面上资助“西部地区博士后人才资助计划”(编号: 2015M572630XB)共同资助。
苏腾飞(1987-),男,硕士,实验师,主要从事面向对象的遥感图像分析算法方面的研究。Email: stf1987@126.com。
张圣微(1979-),男,博士,教授,硕士研究生导师,主要从事定量遥感、生态水文及气候变化等方面的研究。Email: zsw_imau@163.com。
TP 751.1
A
1001-070X(2017)02-0072-10
