光伏发电系统MPPT研究与仿真
2017-04-27赵春柳
赵春柳


摘要:光伏电池的利用率一般受辐照度、温度等因素的影响,在光伏发电系统中,为寻求光伏电池的最优工作状态,都采用最大功率点跟踪(MPPT)技术。本文以常用的定电压跟踪法(CVT)、扰动观测法(P&O)和电导增量法(INC)为研究对象,搭建PSIM仿真电路,Visual C++生成的DLL实现相关MPPT算法。通过在辐照度、温度变化下的PV系统三种MPPT算法功率跟踪效率的仿真结果,分析三种MPPT技术的有效性和优缺点。分析结论对光伏发电系统选择MPPT算法具有指导意义。
关键词:MPPT;定电压跟踪法;扰动观测法;电导增量法
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2016)29-0257-03
当今世界正迅速地从工业化社会向低碳社会转化,能源利用正向可持续发展方向转变,因此发展绿色能源成为趋势。太阳能光伏发电由于其可再生性、清洁性等特点,正在发展为全世界绿色能源组成中的重要部分。
最大功率点跟踪(MaximumPowerPointTracking,MPPT)技术是光伏发电高效利用的关键技术之一,同时MPPT技术是光伏发电系统中的一个通用综合性技术,涉及光伏阵列建模、优化技术、电力电子变换技术及现代控制技术等。因此,在光伏发电系统中,普遍采用MPPT技术,以求高效利用太阳能。
1变换器主电路
为了便于比较各种MPPT算法的优缺点,本文建立统一的光伏发电系统模型,如图1所示,采用Boost变换器、电阻性负载。为了便于分析几种MPPT算法最大功率跟踪的效率,Boost变换器中器件均采用理想器件。
2光伏系统的最大功率点跟踪技术
2.1定电压跟踪法
定电压跟踪(Constant Voltage Tracking,CVT)法是最早出现的光伏功率输出控制算法。在辐照度大于一定值并且温度变化不大时,光伏电池的输出最大功率时其输出电压在某一值附近,只要控制光伏电池输出电压在该电压处,即可控制太阳能电池板输出最大功率。
进一步研究发现,光伏电池最大功率点电压u。与光伏电池的开路电压Uoc之间存在近似的线性关系,即
Umpp≈k1oc (1)
其中,式1系数k1的值取决于光伏电池的特性,一般取值大约在0.8左右。
CVT算法采用PI控制器,给定值Umpp、太阳能光伏电池的输出电压Upv与PI调节器之间的关系如图2所示。
2.2扰动观测法
扰动观测法(Perturbation and Observation method,P&O)是目前最常用、也是研究最多的一种MPPT方法。其工作原理是:先让光伏電池工作于一给定电压点上,随后周期性地、微小定量地增加或减少光伏电池的输出电压△U或△I(扰动),根据扰动量的变化的方向及光伏电池输出功率变化方向,再决定下一步扰动量的变化的方向。以此不断寻找、逼近光伏电池的最大功率点。
本文光伏发电系统的变换器采用Boost变换器,将太阳能电池的扰动量由电压△U或△I改换为变换器开关管的导通占空比扰动量AD,依据Boost的工作原理,扰动观测法的算法原理流程如图3所示。
2.3电导增量法
电导增量法(Incremental Conductance,INC)从光伏电池输出功率随输出电压变化率而变化的规律出发,提出的MPPT算法。
光伏电池的功率电压(P-U)曲线可以看成一个单峰值的曲线,在最大功率点出dP/dU=0。光伏电池的瞬时输出功率为
P=-IU (2)
将式(2)两边对光伏电池的输出电压u求导,则
(3)
当dP/dU=0时,光伏电池的输出功率达到最大,则可以推导出工作点位于最大功率点时需要满足以下关系
(3)
实际中以△I/△U近似代替dI/dU,则使用电导增量法进行最大功率点跟踪时判据为
(4)依据Boost的工作原理,INC的算法原理流程如图4所示。
3仿真分析
为了验证CVT、P&O和INC等MPPT算法有效性及跟踪效率,仿真时设置了太阳辐射强度变化及环境温度变化时太阳能电池最大功率输出跟踪效果。其他仿真参数为:仿真时间步长10-6s,采样时间步长10-4s,开关管的开关频率50kHz,开关管导通占空比扰动步长为0.001。
CVT、P&O及INC等MPPT算法借助Visual C++编程生成的动态链接库文件及PSIM的DLL模块实现,PSIM的DLL模块如图5所示。
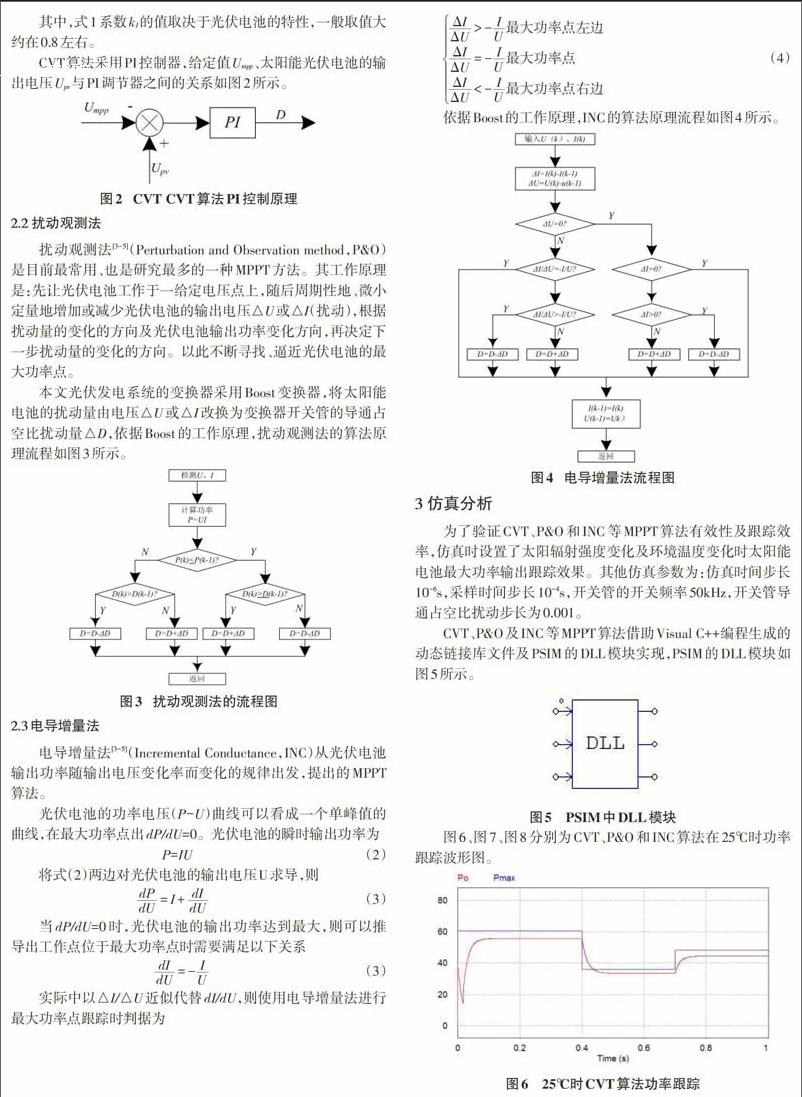
图6、图7、图8分别为CVT、P&O和INC算法在25℃时功率跟踪波形图。
图9、图10、图11分别为CVT、P&O和INC算法在35℃时功率跟踪波形图。
4结束语
由以上仿真波形可知,CVT法实际上是一种开环的MPPT算法,控制简单快速,但是由于忽略了温度对光伏电池输出电压的影响,因此温差越大,跟踪最大功率点的误差也越大。P&O和INC算法跟踪最大功率点均不存在温度影响,P&O具有控制概念清晰、简单、被测参数少等优点,但P&O法中电压初始值及扰动占空比(扰动电压)步长对跟踪精度和速度有较大影响,且存在跟踪振荡问题;INC算法控制精度高、响应速度快,光伏电池输出电压能够以较平稳的方式跟踪变化,而且稳态的振荡比P&O小,其缺点是对控制系统的硬件(如传感器的精度等)要求比较高。
