新型ETC数据侦听和故障定位系统的设计*
2017-04-26马涛,郑鑫
马 涛,郑 鑫
(1.天津中兴智联科技有限公司 产品开发部,天津 300308;2.中兴通讯股份有限公司 天津分公司 微波开发部,天津 300308)
新型ETC数据侦听和故障定位系统的设计*
马 涛*1,郑 鑫2
(1.天津中兴智联科技有限公司 产品开发部,天津 300308;2.中兴通讯股份有限公司 天津分公司 微波开发部,天津 300308)
高速公路不停车收费(ETC)已经实现全国联网,用户超过3 200万,参与建设的厂家近20余家,多厂家、多型号设备之间互联互通是系统的关键,如何能够快速准确地定位设备之间兼容性的问题,成为当务之急。针对需求,设计了基于科斯塔斯(Costas)环的新型ETC数据侦听和故障定位系统,描述了系统的工作原理、整体框架和开发思路。该系统已经开发完成并规模应用于ETC联网工作中,对故障定位、协议一致性判定、规范建设起到了不可替代的作用。该系统与现有方案相比其灵敏度提升15 dBm,并且具备可同时侦听多信道、支持数据并发等突出优点。
电子不停车收费;科斯塔斯环;数据侦听;故障定位;高灵敏度;多信道
1 引 言
电子不停车收费(Electronic Toll Collection,ETC)系统[1],在智能交通系统(Intelligent Transportation System,ITS)中具有特殊的地位,特别是在高速公路及桥梁(包括贯穿城市的大型桥梁)收费系统中更显示其重要性[2]。近年来,ETC在我国各省、市、自治区广泛推广,ETC技术的使用有效提高了人工收费效率,缓解了收费站车流拥堵状况[3]。随着全国联网工作开展以及用户数量的飞速增长,快速准确地定位各款设备之间的兼容性问题是实现互联互通工作的难点。目前国内鲜有专门开发数据侦听和故障定位系统的报道,但在工作过程中可以了解到部分厂家利用ETC现有设备开发了相应的数据侦听和故障定位工具,但由于其架构局限性,并不能很好地完成预定功能和性能,例如只能侦听单个信道、接收灵敏度不足、不能实时处理并发上下行数据等,从而造成侦听丢帧、侦听距离不够、分析系统实时性不够、不直观等应用问题。本文介绍了基于科斯塔斯(Costas)环的ETC数据侦听和故障定位系统,系统摒弃了现有ETC设备的架构,从根本上解决了现有设备的不足。本文从总体架构、硬件设计以及软件设计等多个维度对系统进行介绍,系统已经设计实现并规模应用于ETC联网工作中,较现有系统性能提升明显。
2 系统的总体设计方案
系统由数据侦听设备硬件实体和运行于计算机上的系统分析软件两大部分构成。系统整体框图如图1所示。系统工作时,数据侦听设备通过通用串行总线(Universal Serial Bus,USB)接口与电脑(Personal Computer,PC)相连,操作人员通过系统分析软件配置侦听设备本次工作的频点、需要分析的协议类型、灵敏度级别等参数,然后启动数据侦听设备,数据侦听设备会通过空中接口接收附近处于工作状态的所有ETC设备的数据帧,设备将数据帧解码分析后通过USB接口上传给系统分析软件,软件可将接收到的数据帧通过分析窗口或图形窗口两种形式进行呈现,操作人员可以通过两种方式详细分析被侦听ETC设备的空口交互,进而进行故障定位、判断协议一致性和符合度。

图1 系统整体框图
侦听设备主要由天线、两个滤波模块、比较器解调模块、Costas环解调模块、基带信号处理模块、微处理器模块、声光控制模块、电源网络以及外部接口等部分组成。
该系统具备灵敏度高,可同时监听ETC系统全部信道(含上下行)数据,可处理并发数据等突出特点,实际应用场景检验表明其功能和性能较现有设备有明显提升。
3 系统的硬件设计
系统硬件主要构成如下:
(1)对外提供USB接口,该接口既可完成侦听设备与上位机之间的通信,同时也为系统提供5 V电源;
(2)对外提供RS232接口,作为辅助通信接口;
(3)对外提供直流电源接口,内部通过开关电路与USB供电网络兼容;
(4)微处理器小系统主要完成软件版本存储及运行,与上位机之间的USB通信,外部接口的切换、通信、控制,声光指示控制(发光二极管、蜂鸣器),配置非易失性随机访问存储器(Non-Volatile Random Access Memory,NVRAM),完成版本信息存储等,现场可编程门阵列(Field Programmable Gate Array,FPGA)的版本下载和驱动接口;
(5)FPGA主要完成Costas环滤波功能实现,反向双相间空号编码(Bi-Phase Space Coding,FM0)解码、高级数据链路控制(High-Level Data Link Control,HDLC)解析、接收消息上报,串行模数转换器(Serial Analog-to-Digital Converter,SADC)的时序控制,接收的信号强度指示(Received Signal Strength Indication,RSSI)数值读取,与微处理器的数据缓存接口;
(6)ML9636主要完成5.8 GHz本振生成、混频和相干解调、幅移键控(Amplitude Shift Keying,ASK)数据恢复;4路分别接收5.79 GHz、5.8 GHz、5.83 GHz、5.84 GHz共4个频点的信号;
(7)低噪声放大器(Low Noise Amplifier,LNA)为5.8 GHz射频信号放大单元;
(8)5.8 GHz天线采用外置式的全向天线,SMA接口。
硬件主要组成框图如图2所示。
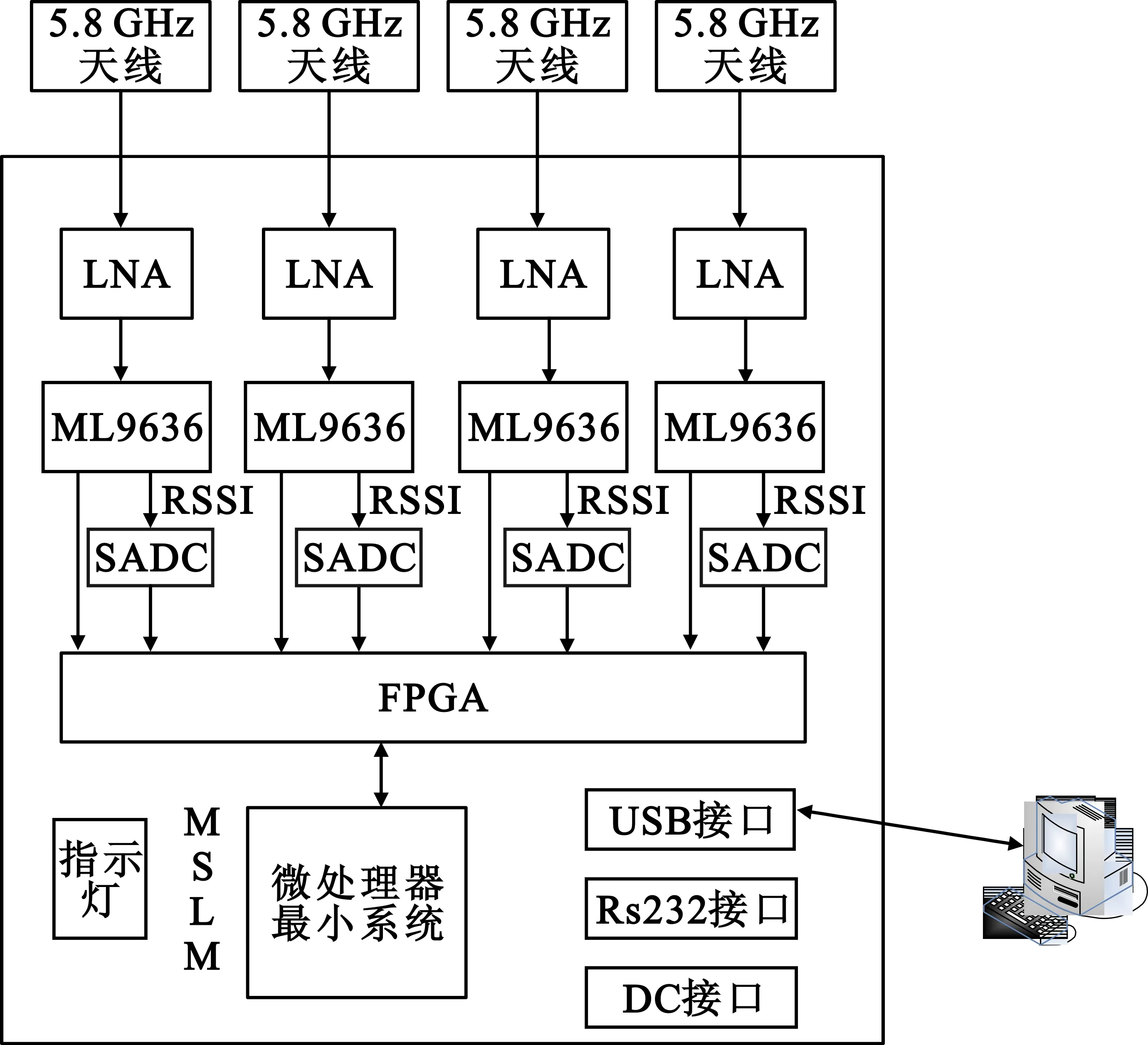
图2 硬件总体框图
硬件的设计难点和特色之处,下文将分别给予详细论述。
3.1 电源网络设计
整个系统的电源采用树状拓扑结构,充分考虑各个模块对电源纯净度要求和功耗进行分配,保证各个模块电源稳定,以保证其性能最佳,其拓扑如图3所示。
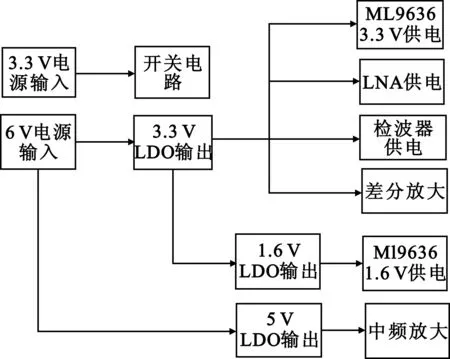
图3 系统电源拓扑图
3.3 V电源为天线切换开关提供电流;6 V电源通过低压差线性稳压器(Low Dropout Regulator,LDO)变为3.3 V,给ML9636供电,单板增加滤波电路,同时为LNA、检波器、差分放大器供电;6 V电源通过LDO变为5 V,给中频放大管供电;ML9636还需要1.6 V供电,通过LDO将3.3 V降压到1.6 V,并增加滤波电路。
3.2 射频接收链路的实现
天线接收模块包括两个外置全向天线、两个LNA以及两个功分器。两个天线用来接收路侧设备(Road Side Unit,RSU)和车载设备(On board Unit,OBU)发出的微波信号;两个低噪放LNA分别用来对天线接收到的微波信号进行滤波放大处理;每个功分器都将一路信号分为两路送给射频模块进行处理,分别产生信号1、信号2、信号3、信号4,从而实现了同时侦听两个信道、4个通道的信号。
射频模块主要由4片专用短程通信芯片ML9636及其外围电路组成,4个芯片分别与两个功分器分成的4路射频信号相连,分别工作在5.79 GHz、5.80 GHz、5.83 GHz、5.84 GHz 4个频点,用于对这4个频点的射频信号进行低噪放、混频、解调(仅限于比较器解调方式)等处理。ML9636可以根据接收信号频偏情况调节滤波器带宽。本侦听设备采用超外差接收方式,天馈信号经过低噪放、混频处理后产生一个40 MHz的中频信号,为保证接收信号质量,需要有滤波器对该信号进行滤波处理。本侦听设备采用了两种滤波器,一种是集成声表滤波器,带宽为5 MHz;另一种是LC模拟滤波器,带宽为10 MHz。当被接收信号频偏较小时,采用声表滤波器;当被接收信号频偏较大时采用LC模拟滤波器。切换方式可通过开关实现。
为了作为实验对比,监听设备设计了两种解调方式,一种是比较器解调方式,一种是Costas环解调方式。前者接收灵敏度较低,适合近距离使用,后者接收灵敏度较高,适合远距离使用。两种工作方式可以通过开关切换。使用比较器解调方式时ML9636直接输出解调后的基带信号,使用Costas环解调方式时ML9636输出对应的包络模拟信号,该信号通过放大后再经过高速AD转换器,数字化后的信号进入FPGA,FPGA实现Costas环滤波和同步,进而完成解调、FM0解码、HDLC解析,然后重新组帧上报给微处理器。
从应用的角度以及侦听设备整体功能看,单板主要由射频接收链路构成,包括低噪声放大电路,集成芯片ML9636电路、ML9636参考时钟单元、中频滤波单元、中频放大单元射频收发开关、基带信号放大单元、包络检波单元等,设计难点在于接收带宽窄、接收信道多、实时性强、各个信道间不能出现接收干扰等。
整个链路单工工作,内/外置天线可以随意切换,为了简化描述,以其中一个信道为例,其框图如图4所示。

图4 射频链路
3.3 Costas环的实现
载波同步又称载波恢复,即在接收设备中产生一个和接收信号的载波同频同相的本地振荡,供给解调器作相干解调用。相干解调中相干载波获取的精确程度对于通信质量有着十分重要的影响,而载波同步是实现相干解调的先决条件,所以设计高性能的Costas环就显得尤为必要。
Costas环又被称为同向正交法[4],其基本框图如图5所示。

图5 Costas环原理图
加于两个相乘器的本地信号分别为压控振荡器的输出信号[5]:


低通后的输出分别为
v5和v6加于相乘器,得

v7的大小与相位误差θ成正比,它就相当于一个鉴相器的输出。用v7去调整压控振荡器输出信号的相位,最后使稳态相位误差减小到很小的数值[6-7]。这样压控振荡器的输出就是所需提取的载波。
侦听设备的Costas环使用VHDL语言实现。FPGA使用ALTERA公司的EP2C35F672C8N,其实现组成框图如图6所示。数字积分器的逻辑实体为累加器,通过对输入数据的累加求和完成积分功能。

图6 Costas环实现框图
Costas环中的同相积分器和正交积分器除输入数据外,还有一个猝息信号,当猝息信号有效时积分值清零,猝息信号采用同步清零的方式,不采用异步清零的Reset信号。设计累加器时要确定加法器的数值形式,本系统采用二进制补码。确定加法器的位数是由输入信号的位数和最大累计时间决定的。
系统实现后的模拟仿真波形如图7所示。
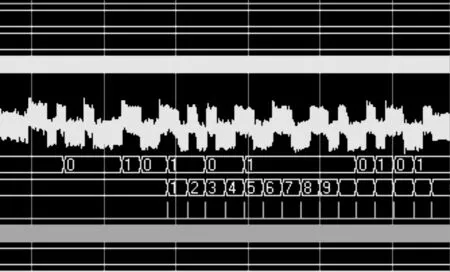
图7 Costas环模拟仿真波形
3.4 中频滤波单元设计
中频放大完成的信号,分别为15 MHz和25 MHz的中频信号,然后进入中频滤波器进行信号滤波,滤除掉带外信号。
3.5 低噪声放大单元设计
系统接收到射频信号以后,经过射频开关和介质滤波器以后送到低噪声放大模块上,LNA选取的是RF2472。
低噪声放大单元电路如图8所示,其中PD管脚为RF2472的开关信号。
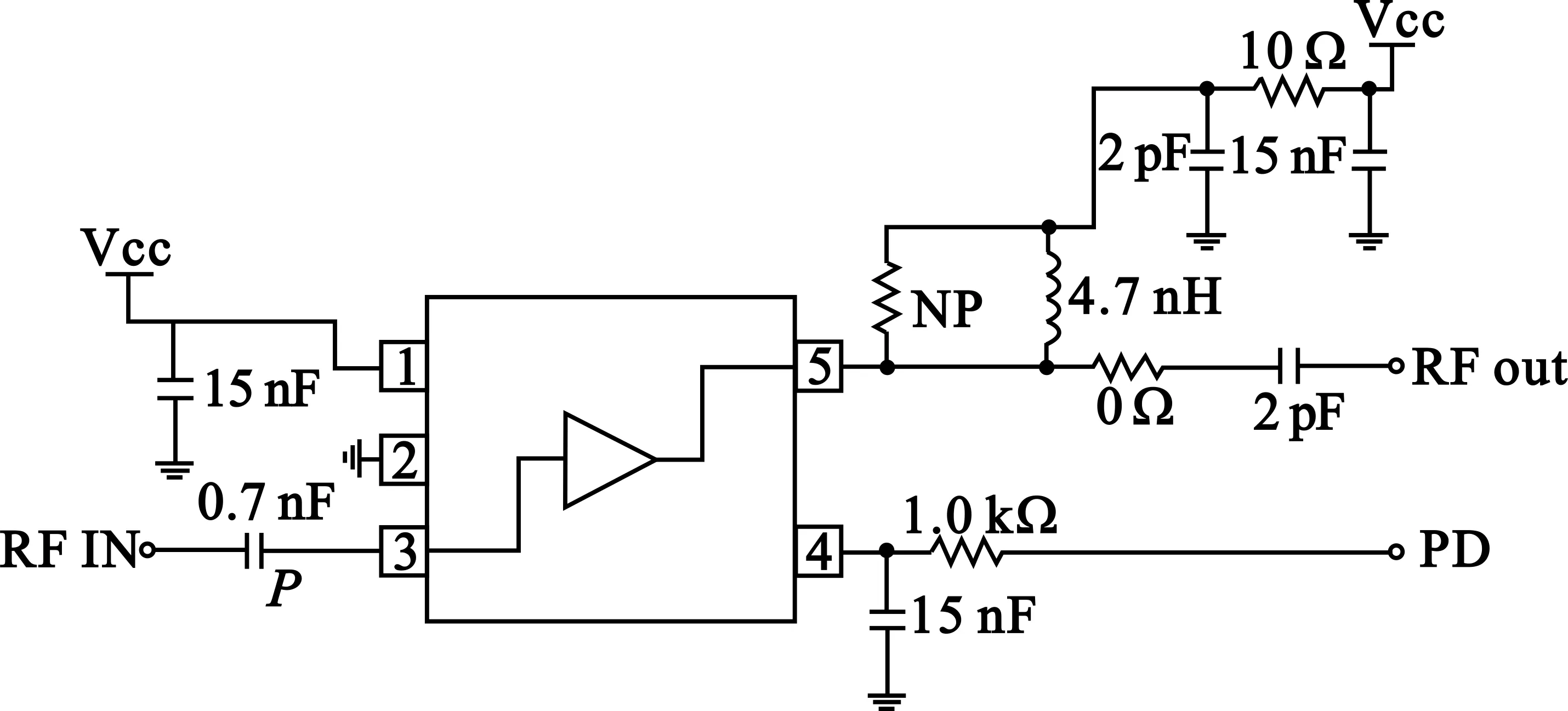
图8 低噪声放大单元电路
4 系统分析软件设计
系统分析软件使用JAVA开发,运行于Windows环境下,人机界面友好,稳定性好。
系统分析软件包含侦听操作、侦听过滤、文件操作、配置操作等多个组件,每个组件又包含若干功能,其拓扑结构如图9所示。
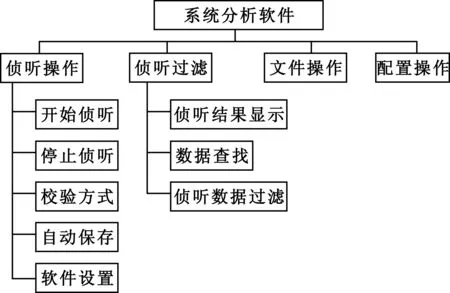
图9 软件结构图
最终实现的软件分析界面如图10所示。

图10 软件界面图
分析软件可以对侦听的数据帧进行分析,将每个字节或者比特的含义直观地呈现给操作人员,并且可以将疑似出错的位置标注出来,免去了人为比对的工作。分析软件还可以切换为以时间为横轴的数据流显示模式,方便操作人员观察数据帧之间的时间间隔,并且数据流上还叠加信号强度信息,可以直观了解所接收信号的能量等级。
5 性能对比
由于系统预留了比较器解调和Costas环解调两种方式,所以很容易获得两种方式的接收灵敏度对比。使用信号源发送测试数据帧,在相同的测试条件下,基于现有架构的比较器解调方式,其灵敏度在-65 dBm左右;使用Costas环解调方式,其灵敏度可以达到-80 dBm左右,可见接收灵敏度优化效果明显。
同时使用两种方式在试验车道、高速公路实际收费站等地进行测试,使用Costas环方式数据侦听性能稳定,上下行数据不丢帧,但使用比较器方式的就会出现丢帧情况。
除了灵敏度高的特点外,与其他现有侦听工具和系统对比,本系统还具备可同时侦听多信道、支持数据并发等突出特点。
6 结束语
本系统已经投入实际应用,经过实践证明这一系统完全满足设计需要,具有全向接收、灵敏度高、侦听范围广、支持协议多、显示直观、分析迅速等特点,能够快速准确地定位ETC系统故障,可以判断协议一致性和符合度,使用效果得到了内外部客户的肯定。本文思路亦可为其他空口协议复杂、故障定位困难的系统参考。本系统依然具有外尺寸稍大的不足,后续可以通过设计减小尺寸,从而携带更便捷;另外,在应用软件侧可以考虑增加波形解析等功能,对于不同应用人员可以开放不同的分析权限。
[1] 李元忠.射频识别技术及其在交通领域的应用[J].电讯技术,2002,42(5):5-9. LI Yuanzhong.The RFID technology and its application in transportation field[J].Telecommunication Engineering,2002,42(5):5-9.(in Chinese)
[2] 关振柔.智能交通系统的兴起及发展前瞻[J].电讯技术,1999,39(1):46-52. GUAN Zhenrou.Development trend of intelligence transportation system[J].Telecommunication Engineering,1999,39(1):46-52.(in Chinese)
[3] 马涛.一种基于NFC的自充值ETC运营系统[J].物联网技术,2015(1):99-100. MA Tao.Self charging ETC operation system based on NFC[J].Internet of Things Technologies,2015(1):99-100.(in Chinese)
[4] 苏洲,冯全源,俞卫中.基于FPGA的全数字科斯塔斯环的设计与实现[J].微电子学与计算机,2013(7):72-77.SU Zhou,FENG Quanyuan,YU Weizhong.Design and implementation of digital Costas loop based on FPGA[J].Microelectronics & Computer,2013(7):72-77.(in Chinese)
[5] 袁君,冯全源,王丹.基于FPGA的全数字相干解调器的实现[J].微电子学与计算机2013,30(5):38-42. YUAN Jun,FENG Quanyuan,WANG Dan.An implementation of all-digital coherent demodulator based on FPGA[J].Microelectronics & Computer,2013,30(5):38-42.(in Chinese)
[6] 徐贵贤,易润堂.遥测中载波同步的实现[J].电讯技术,2003,43(2):79-83. XU Guixian,YI Runtang.Realization of carrier synchronization in telemetry[J].Telecommunication Engineering,2003,43(2):79-83.(in Chinese)
[7] 熊小莉.直接序列扩频信号数字科斯塔斯环的分析与设计[J].电讯技术,2001,41(4):26-30. XIONG Xiaoli.Analysis and design of DSSS signal digitalization costas loop[J].Telecommunication Engineering,2001,41(4):26-30.(in Chinese)
Design of a New ETC Data Interception and Fault Location System
MA Tao1,ZHENG Xin2
(1.Product Development Department,ZTE Intelligent IOT Technology Co.,Ltd.,Tianjin 300308,China; 2.Microwave Development Department,Tianjin Institute,ZTE Corporation,Tianjin 300308,China)
Electronic Toll Collection(ETC) has been networked.There are more than 32 million users and the manufacturers involved in the construction are nearly more than 20.The interoperability between different manufacturers and types of equipment is the key problem of system design.How to quickly and accurately positioning the compatibility between equipment becomes the urgent affair. According to the demand,ETC data monitoring and fault location system based on the Costas loop is designed,and the working principle,overall framework and developing thought of the system are described.The system has been developed and widely applied in ETC networking.It has played an irreplaceable role in the fault location,determination,protocol conformance specification for construction. Compared with the existing schemes,the proposed system has improved the sensitivity of 15 dBm and is featured by simultaneously intercepting multiple channel and supporting data concurrency.
ETC;Costas loop;data interception;fault location;high sensitivity;multiple channel
10.3969/j.issn.1001-893x.2017.04.008
马涛,郑鑫.新型ETC数据侦听和故障定位系统的设计[J].电讯技术,2017,57(4):412-417.[MA Tao,ZHENG Xin.Design of a new ETC data interception and fault location system[J].Telecommunication Engineering,2017,57(4):412-417.]
2016-10-19;
2017-01-04 Received date:2016-10-19;Revised date:2017-01-04
TN925
A
1001-893X(2017)04-0412-06

马 涛(1981—),男,河北吴桥人,硕士,高级工程师,主要研究方向为智能交通、智能仪表及工业控制;
Email:mt414@126.com
郑 鑫(1981—),女,山西太原人,硕士,高级工程师,主要研究方向为智能交通、微波传输技术。
*通信作者:mt414@126.com Corresponding author:mt414@126.com
