半球谐振陀螺研究现状与发展趋势
2017-04-26曲天良杨开勇
潘 瑶,曲天良,杨开勇,罗 晖
(国防科技大学光电科学与工程学院,长沙 410073)
半球谐振陀螺研究现状与发展趋势
潘 瑶,曲天良,杨开勇,罗 晖
(国防科技大学光电科学与工程学院,长沙 410073)
半球谐振陀螺是基于哥氏效应测量角速度的新型固态陀螺,具有结构简单、精度高、功耗低、寿命长、可靠性好、抗空间辐射等优点,是捷联惯性导航系统的理想陀螺仪,在宇航领域具有独特的应用优势。半球谐振陀螺的理论精度不受量子尺寸效应限制,是高精度、微型化陀螺的重要发展方向之一。首先介绍了半球谐振陀螺的基本工作原理,其次介绍了半球谐振陀螺的发展历程,综述了半球谐振陀螺的国内外研究现状,最后对半球谐振陀螺的发展趋势进行了展望。
半球谐振陀螺;哥氏效应;惯性导航
0 引言
近年来,随着我国航空航天等领域的空前发展,对可用于高精度、高可靠性、长寿命惯性导航系统的高性能陀螺仪提出迫切需求。半球谐振陀螺(Hemispherical Resonator Gyroscope,HRG)是 20 世纪 60 年代出现的一种新型陀螺。与传统机械陀螺相比,它结构简单,没有磨损部件(机械转子、光源等),无需后期维护;不需预热,启动时间短;具有很强的抗冲击能力,能承受大的机动过载(3000g);谐振子物理特性稳定,因而陀螺具有很高的可靠性和超长的寿命;此外半球谐振陀螺还具有抗辐射能力,使其非常适合在空间飞行器、卫星等辐射环境下长时间工作的装备中使用[1]。与当下激光陀螺和光纤陀螺相比,半球谐振陀螺结构简单、零部件数大大减少,理论上精度不依赖于尺寸,噪声性能不受量子效应限制,因此,半球谐振陀螺是最有潜力实现高精度、小型化、低成本的陀螺仪。例如,近20年,美国在其空间任务中,优先采用Northrop Grumman公司的高精度半球谐振陀螺捷联惯性系统方案,并创造了累计空间飞行3000万小时无一故障的记录(2015年2月),充分表明其空间应用的独特优势[2]。法国Sagem公司的半球产品Regys 20在航海罗盘中成功应用,并在寻北、导弹、陆用惯导及空间惯导系统中成功推广[3-7]。以上成功应用充分体现出半球谐振陀螺极其重要的应用价值和广阔的应用前景。
我国的半球谐振陀螺在理论研究方面取得了一定成果,在关键技术方面有部分突破,但在卫星和航天器上的应用处于初步探索阶段。加快高性能半球谐振陀螺的研制进度,开发基于半球谐振陀螺的惯性系统,对于满足我国空天领域关于高精度、长寿命、高可靠性惯性导航系统的迫切需求具有重要的战略意义。
1 半球谐振陀螺工作原理
早在1890年,英国物理学家G.H.Byran发现敲击并旋转酒杯,会听到“差拍”,表明酒杯中的驻波相对空间旋转;由于驻波的惯性,其转动以一定比例滞后于酒杯的转动。半球谐振陀螺的基本工作原理即是利用弹性驻波的惯性效应测量角速度[8]。
如图1所示,半球谐振子振动于最低阶弯曲模态(又称酒杯模态,四波腹模态)。理想情况下,模态的波腹和波节的位置相对于半球壳稳定。在外界角速度作用下,驻波振型以约0.3的比例落后于半球壳转动,即如果半球壳转过90°,振型转动将落后约27°。比例因子0.3称为半球壳的几何比例因子[1]。
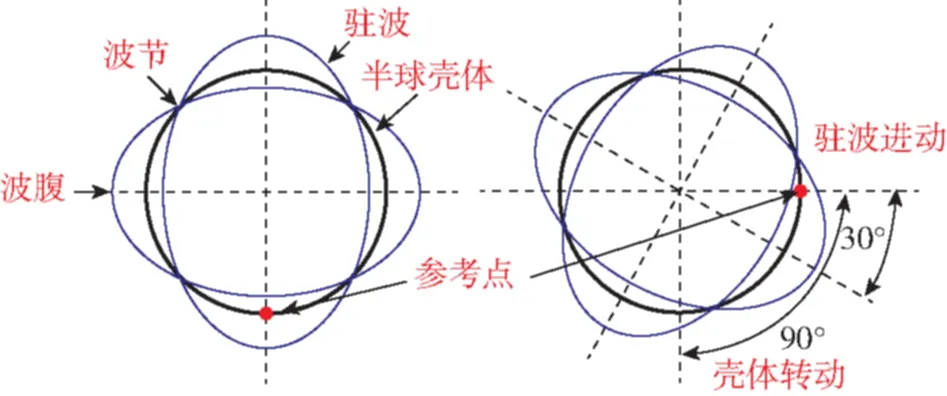
图1 半球谐振陀螺测量原理Fig.1 The measurement principle of HRG
半球谐振陀螺可以工作于两种模式:全角模式(Whole-angle mode)和力平衡模式(Force-to-rebalance mode)。全角模式下,检测电极直接读出驻波相对于壳体的位置,比例因子只与几何进动因子有关,因此十分稳定(10-6量级);由于驻波可相对于壳体自由进动,因而陀螺具有很大的动态范围。力平衡模式下,通过反馈控制使驻波相对壳体位置固定,控制所需电压与角速度成比例。相对于全角模式,力平衡模式的测量精度高、噪声性能和零偏稳定性较好,但动态范围较小。两种模式各有优缺,应根据应用场合合理选择:高速情况下首选全角模式,而低速高精度测量首选力平衡模式[1]。
2 半球谐振陀螺发展历程
美国Northrop Grumman公司的半球谐振陀螺是当前谐振陀螺领域的标杆产品,其发展历程如图2所示。
1965年,Delco工程师论证了将Byran效应应用于角速度测量的可行性,第一个半球谐振陀螺由此诞生[1]。随后半球谐振陀螺研究停滞,直到1975年,NAVAIR资助Delco工程师开发直径58mm半球谐振陀螺Block 10,并在80年代初采用熔融石英材料制作半球谐振子(Block 20),使品质因数超过107。在此期间,封装技术、调平技术、镀膜技术的发展及误差机理的分析为半球谐振陀螺的性能提高打下坚实基础。80年代Delco公司开发了HRG158系列,并基于HRG158Y开发了六轴冗余惯导系统Carousel-404,首次展示了半球谐振陀螺的优异性能。该系统在4000h的波音747飞行测试中导航精度达到0.8nmi/h,且没有一次故障。但由于第一次海湾战争的爆发,该系统没能投产。

图2 美国Northrop Grumman公司半球谐振陀螺发展历程[1,11]Fig.2 The development of HRG in Northrop Grumman of the USA
20世纪80年代末,在海军资助下,第一个30mm半球谐振子问世。这一阶段,许多关键技术得到发展,例如谐振子加工工艺的提高、谐振子品质因数的进一步提高、谐振子修形系统的完成、陀螺电路性能的提高等。1982年,关于半球谐振陀螺的公开报道,激发了包括苏联、中国等国家在内的其他国家相继展开关于半球谐振陀螺的研究。1996年,基于HRG 130Y的第一个空间惯性参考单元(Space Inertial Reference Unit,SIRU)发射升空(NEAR),其主要性能指标如表1所示。SIRU系统在商用通信卫星及土星探索项目CASSNI中的应用均取得成功。

表1 HRG 130P与mHRG对比[11, 14]
20世纪90年代末,经过一系列结构及工艺改进,Northrop Grumman半球谐振陀螺最终确定量产型号 HRG 130P,并开发了基于该型号的扩展空间惯性参考单元(Scalable Space Inertial Reference Unit,SSIRU)。
3 国内外研究进展
目前,美国Northrop Grumman公司的主要型号为HRG130P型半球谐振陀螺,产品零偏稳定性小于0.0015(°)/h,角度随机游走小于0.00015(°)/h1/2,角度白噪声小于0.003 arc s/Hz1/2,比例因子短时稳定度小于5×10-6,可靠性极高。另外,该系统公开报道的零偏稳定性达到0.0001(°)/h,角度随机游走达到0.00002(°)/h1/2,为目前基于半球谐振陀螺的惯性系统产品中公开报道的最高指标。当前,该公司惯性系统部门正致力于研发微型半球谐振陀螺(milli-HRG)以及基于已有空间技术的陆基惯性导航系统,拟应用于高精度指向系统。基于HRG 130P,研发人员对微型半球谐振陀螺结构进行了极大简化,核心部件个数仅为5个(如图2右下角所示);采用了基于低功耗元件的电路设计,从而大大降低功耗。为进一步降低成本,并提高惯性系统导航精度,近年来Northrop Grumman公司大力发展连续自校正(Self-calibration,SC)算法。该算法的核心思想是通过交换激励检测模态,进行陀螺零偏的自补偿;通过跟踪进动因子,进行力平衡模式比例因子的自补偿。测试结果表明,对于同样的mHRG,采用自补偿算法后长时零偏稳定性有望提高1个数量级[9-14]。HRG 130P及mHRG主要参数对比如表1所示。基于mHRG和自补偿算法,该公司正在研发小型陆基惯性传感单元(Inertial Sensor Assembly,ISA),如图3所示,并称该单元将成为今后该公司惯性技术生产线的核心。

图3 Northrop Grumman公司研发中的ISAFig.3 The ISA being developed by Northrop Grumman
法国Sagem公司从20世纪90年代开始半球谐振陀螺仪技术的研究,得到法国国家空间研究中心(CNES)和法国武器装备部(DGA)的大力支持。目前半球谐振陀螺产品型号为Regys 20,其零偏稳定性优于0.01(°)/h,比例因子误差为5×10-6,角随机游走达到0.0001(°)/h1/2[6]。其创新的平面电极结构极大地简化了陀螺加工、装配工艺,降低了成本,如图4所示。目前,Sagem公司已有数千个半球谐振陀螺在陆基、航海、空间及导弹领域成功应用。例如,自2007年以来,Sagem公司有超过100个半球谐振陀螺在空间成功应用,8个轨道通信卫星采用Sagem半球谐振陀螺轨道姿态控制系统;自2011年以来,船用陀螺罗经Bluenaute AHRS已经装配数百艘船只,如图5所示。基于上述成功应用,Sagem公司认为:未来半球谐振陀螺是最有可能与光学陀螺并驾齐驱的陀螺仪。

图4 法国Sagem公司半球谐振陀螺结构[7]Fig.4 The structure of Sagem HRG

(a) 空间速率陀螺单元 (b) BlueNaute惯性导航系统[6]图5 法国Sagem公司代表产品Fig.5 Typical products of Sagem: (a) Spatial rate gyro unit; (b) BlueNaute INS
俄罗斯在半球谐振陀螺研究方面也有较为深厚的积累。理论研究方面,苏联科学院应用力学研究所茹拉夫廖夫和克里莫夫的专著《固体波动陀螺》以及马特维耶夫教授等的著作《固体波动陀螺》成为半球谐振陀螺研究领域的重要理论参考。工程技术方面,俄罗斯拉明斯克仪器设计制造局是俄罗斯最早研究半球谐振陀螺,并研发出工程样机的单位之一。该单位早期研制直径为100mm的半球谐振陀螺,之后研发了直径为50mm的半球谐振陀螺,其随机漂移达到0.005~0.001(°)/h,随机游走达到0.005~0.01(°)/h1/2,预测寿命可达20年。2002年底,拉明斯克仪器设计制造局研制的HRG经过严格论证已经满足武器系统应用要求,考虑投入使用。苏霍伊飞机制造公司从2003年起考虑将其某型飞机惯组系统全部换装为HRG惯组系统。以此为基础,拉明斯克仪器设计制造局当前正在研发直径为30mm的半球谐振陀螺,拟于2016年底完成工程样机的性能测试。
国内半球谐振陀螺始于20世纪80年代,部分学者自1983年第一篇HRG介绍文章后,开始进行相关理论研究。90年代主要为理论研究和原理验证阶段,关于半球谐振陀螺的研究主要集中于半球谐振子的壳体振动特性理论研究及实验验证。1997年,国家对HRG进行立项,由中国电子科技集团公司第二十六研究所进行样机的研制。之后,国内陆续出现了关于半球谐振陀螺的回路控制、误差分析、误差补偿的相关研究,研究单位包括哈尔滨工程大学、哈尔滨工业大学、北京航空航天大学、国防科学技术大学等。中电二十六所于2002年研制出第一批样机,工作于力平衡模式,基本具备了对角速率进行测量的功能。该所于2003年完成第二批样机,在谐振子的加工平衡、正交控制电路设计、微弱振动信号检测等方面取得一定进展,其随机漂移精度小于0.2(°)/h,灵敏度比第一批样机提高了2个数量级,提高了HRG的测量精度。随后,该所在谐振子加工及平衡、电路的优化设计方面不断改进,使半球谐振陀螺初步达到导航级工作性能。2015年,由该所承担的国家863项目长寿命高可靠半球陀螺仪顺利通过验收,其主要性能与国外半球谐振陀螺对比如表2所示[4, 14-15]。
2012年10月,该所半球谐振陀螺仪成功完成为期2年的空间卫星飞行实验,拟进一步验证半球谐振陀螺在轨工作寿命、可靠性和空间环境适应能力。与此同时,国内相关单位也开展了半球谐振陀螺的抗振性能、动态性能优化、在轨标定、寿命预测等方面的研究[15]。
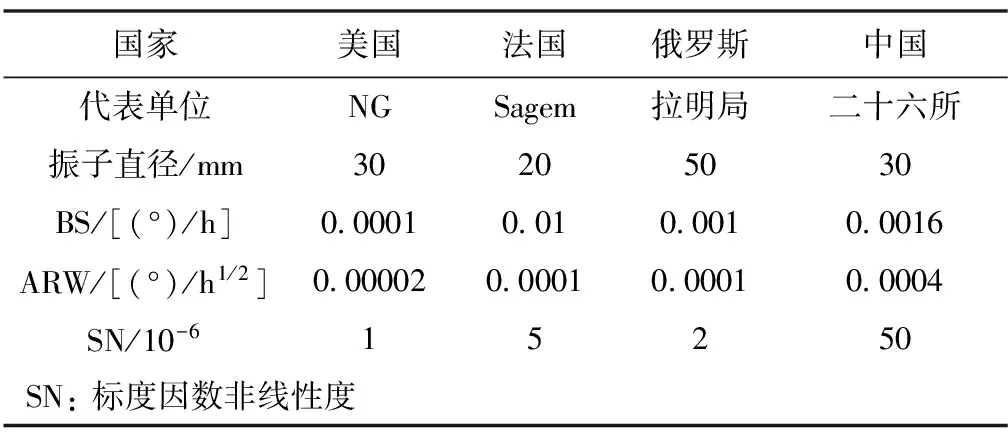
表2 国内外半球谐振陀螺主要参数对比
4 展望
从国际,特别是美国Northrop Grumman和法国Sagem两大巨头发展来看,半球谐振陀螺的未来发展方向有如下趋势:
1)推广半球谐振陀螺在航海和陆基领域的应用。半球谐振陀螺在空间领域的优势已毋庸置疑,其应用向航海和陆地的推广是必然趋势。目前,两大公司争相推出面向航海和陆地应用的惯性传感单元,并作为公司的研发核心和重点产品[7,12-13]。
2)不断减小整个系统的成本、体积、质量和功耗(Cost,size,weight and power, C+SWaP)。作为一种新型固态陀螺仪,半球谐振陀螺已经证明其可以达到导航级工作性能,并且在可靠性、寿命及噪声性能方面具有独特优势。与光纤陀螺、激光陀螺相比,能否推广应用取决于同等工作性能下其C+SWaP是否具有竞争力。
3) 半球谐振陀螺精度不受尺寸限制,其直接测量角度和全角模式下动态范围大等优点启发了微型半球壳谐振陀螺的发展[16],有望应用于无GPS辅助、高动态范围环境下精密导航与制导。
国内半球谐振陀螺仪在理论研究、基础工艺及工程样机性能上有所突破,但陀螺性能稳定性、成品率、可靠性及基于半球谐振陀螺的惯性系统研究及应用研究方面与国外仍有较大差距。半球谐振陀螺相关技术仍需相关研究人员刻苦攻关。
[1] Rozelle D M. The hemispherical resonator gyro: From wineglass to the planets[C]//Proceeding 19thAAS/AIAA Space Flight Mechanics Me, 2009: 1157-1178.
[2] Anon. Northrop Grunnan′s hemispherical resonator GYRO matks 30 million operating hours in space[DB/OL].[2016-01-29].http://news.northropgru-mman.com/news/releases/northrop-grumman-s-hem
ispherical-resonator-gyro-marks-30-million-operating-hours-in-space.
[3] Remillieux G, Goudon J C, Roberfroid D. Coriolis vibrating gyros for aeronautical applications[J]. SAE Technical Paper 2011-01-2731, 2011.
[4] Jeanroy A, Bouvet A, Remillieux G. HRG and marine applications[J]. Gyroscopy & Navigation, 2014, 5(2):67-74.
[5] Remillieux G, Delhaye F. Sagem coriolis vibrating gyros: A vision realized[C]//Inertial Sensors and Systems Symposium. IEEE, 2014:1-13.
[6] Jeanroy A, Grosset G, Goudon J C, et al. HRG by Sagem from laboratory to mass production[C]//IEEE International Symposium on Inertial Sensors and Systems. IEEE, 2016:1-4.
[7] Lenoble A, Rouilleault T. PRIMUS : SWAP-oriented IMUs for multiple applications[C]//DGON Inertial Sensors and Systems (ISS). 2016.
[8] Bryan G H. On the beats in the vibrations of a revolving cylinder or bell[J]. Cambridge Philosophical Society, 1980, 7(3):101.
[9] Meyer A D, Rozelle D M. Milli-HRG inertial navigation system[J]. Gyroscopy & Navigation, 2012, 3(4):24-29.
[10] Trusov A A, Phillips M R, Mccammon G H, et al. Continuously self-calibrating CVG system using hemispherical resonator gyroscopes[C]//IEEE International Symposium on Inertial Sensors and Systems. IEEE, 2015.
[11] Rozelle D M, Meyer A D, Trusov A A, et al. Milli-HRG inertial sensor assembly: a reality[C]//IEEE International Symposium on Inertial Sensors and Systems. IEEE, 2015:1-4.
[12] Trusov A A, Phillips M R, Bettadapura A, et al. mHRG: Miniature CVG with beyond navigation grade performance and real time self-calibration[C]//IEEE International Symposium on Inertial Sensors and Systems. IEEE, 2016.
[13] Trusov A A, Meyer A D, Mccammon G H, et al. Toward software defined Coriolis Vibratory Gyroscopes with dynamic self-calibration[C]//DGON Inertial Sensors and Systems (ISS). 2016.
[14] http://www.northropgrumman.com/Capabilities/SIRU/Documents/Scalable_SIRU_Family.pdf
[15] 毛海燕,梁宇,袁小平,等. 半球谐振陀螺现状及发展趋势[J]. 压电与声光, 2014(4): 584-587.
[16] 潘瑶,杨开勇,吴素勇,等. 微三维谐振陀螺研究的起源、进展与未来[J]. 飞航导弹,2014(10):76-82.
Hemispherical Resonator Gyroscope: Current Advances and Future Trends
PAN Yao, QU Tian-liang, YANG Kai-yong, LUO Hui
(College of Optoelectronic Science and Engineering, National University of Defense Technology, Changsha 410073, China)
Hemispherical resonator gyroscope(HRG)is a novel kind of solid-state gyroscope that measures angular velocity through Coriolis effect. The advantages of simple structure, high precision, low power, long lifetime, high reliability and radiation robustness make HRG the most suitable sensor for strap-down inertial navigation system especially for space applications. Not-limited by quantum effect, HRG is regarded as an important path to high-precision miniaturized gyroscopes. This paper first introduces the basic principles of HRG, followed by its development history and current advances. In the end, the future trends of HRG technology are discussed.
Hemispherical resonator gyroscope; Coriolis effect; Inertial navigation
2016-12-22;
2017-02-03
国家自然科学基金(61575220)
潘瑶(1990-), 女,博士研究生,从事谐振陀螺技术研究。E-mail:yaomeredithpan@hotmail.com
10.19306/j.cnki.2095-8110.2017.02.002
V241.5
A
2095-8110(2017)02-0009-05