面向车道线图像识别的多种滤波方式对比分析
2017-04-26吴志军马林才刘大学
吴志军,马林才,刘大学
(浙江交通职业技术学院,浙江 杭州 31112)
面向车道线图像识别的多种滤波方式对比分析
吴志军,马林才,刘大学
(浙江交通职业技术学院,浙江 杭州 31112)
针对图像预处理的结果会影响车道线识别精度和速度的问题,文中选取二维小波包分解滤波、中值滤波和锐化滤波对某一汽车常用工况下的车道线图像分别进行滤波降噪,采用Sobel算子对未经滤波处理和经过3种滤波处理的车道线图像进行了边缘检测。结果显示二维小波包分解滤波处理后的图像能识别的车道线特征点数目最多,中值滤波处理后的图像能识别的车道线特征点占比最高,锐化滤波处理后的图像识别速度最快。
车道线;二维小波包分解滤波;中值滤波;锐化滤波
1 概述
随着汽车工业在中国的高速发展,汽车主动安全性能正逐步成为人们重点关注的性能指标之一。作为汽车主动安全系统之一的车道保持系统(Lane Keeping System, LKS)在汽车主动安全领域扮演的角色越来越重要。研究表明,大约15%的道路交通事故是由车辆驶离公路造成的[1],车道保持系统能够有效地减少道路交通事故的发生。目前,关于车道保持系统的研究主要集中在两个方面:一是当检测到车辆在行驶过程中偏离车道时,系统向驾驶员发出车道偏离警告信号[2-3];二是系统发送警告信号的同时,通过干预转向系统,纠正车辆姿态,使车辆行驶在正确的车道上,从而保证驾驶员的行车安全[4-5]。
不管系统是否带有干预功能,车道线的识别是车道保持系统的核心部分,其识别质量的好坏直接影响着整个系统控制结果。图像在采集、获取、传送和转换过程中通常会受到随机信号的干扰,大量噪声会导致图像的质量下降,同时也会掩盖车道线信息,因此,在图像中的车道线进行识别前,还需对图像进行预处理—滤波降噪。为了尽可能降低噪声对车道线识别结果的影响,本文选取了二维小波包分解滤波、中值滤波和锐化滤波3种方式,利用Matlab编程工具对某一汽车常用工况下的车道线图像分别进行了滤波,并对3种滤波结果进行了分析。
2 3种滤波方式
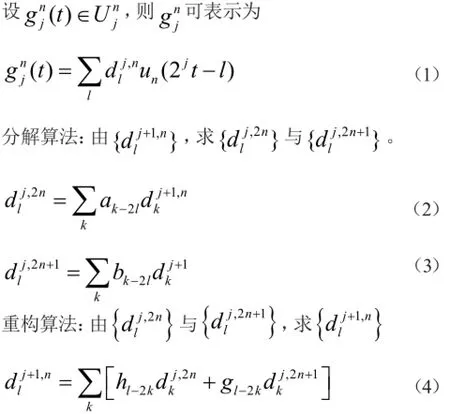
(1)维小波包分解滤波。二维小波包分解能将频带进行多层次划分,对分辨率分析没有细分的高频部分进一步分解,且能依据被分析特征自适应地选择相应的频带,使之与信号频谱向匹配,从而提高时频分辨率[6]。它属于线性时频分析法,具有良好的时频定位特性以及对信号的自适应能力。具体分解算法和重构算法如下。
Matlab M语言编程如下:
T=wpdec2(f,1,’sym2’);
thr=10;
NT=wpthcoef(T,0,’s’,thr);
f2=wprcoef(NT,1);
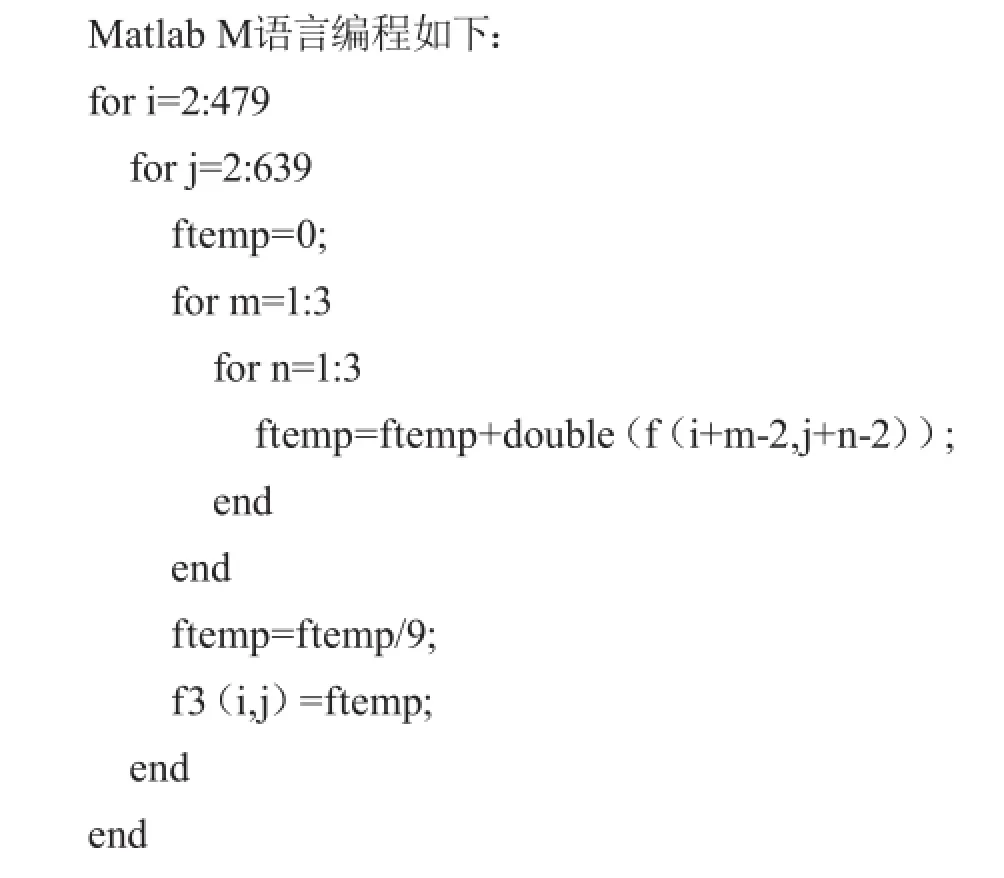
(2)中值滤波。中值滤波是一种局部空间域处理的算法,其基本原理是用几个像素灰度的平均值来代替每个像素的灰度[7]。设图像f(x,y),滤波处理后得到的一幅图像为g(x,y)。

式中,x,y=0,1,2,…,N-1;S是(x,y)点邻域中点的坐标集合,但其中不包括(x,y)点,M是集合内坐标点的总数。式(5)说明了滤波后的图像g(x,y)中的每个像素的灰度值均有包含在(x,y)的预定邻域中的f(x,y)的几个像素的灰度值的平均值来决定。
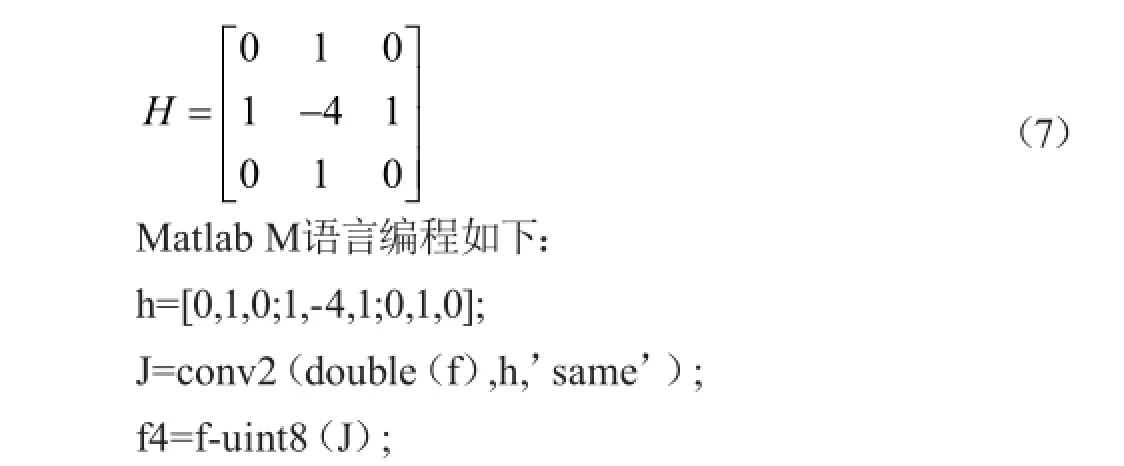
(3)锐化滤波。车道线边缘模糊使得图像特征提取、识别和理解的难度加大,锐化图像能够增强图像边缘特征,使得边缘变得清晰、易处理。图像锐化有多种方式,如梯度法、锐化算子、拉普拉斯算子、掩模法等。本文采用拉普拉斯算子,这是常用的边缘增强处理算子,比较适用于改善因光线的漫反射造成的图像模糊。离散函数的拉普拉斯算子公式[8]为:

对于式(6)也可用拉普拉斯算子模板来表示
3 滤波结果分析
本文选取某段高速公路的车道线图像,尺寸为640×480。为了降低运算量,提高运算速率,笔者将原始彩色图像进行了灰度化处理,并在此基础之上,利用Matlab编程工具以3种不同滤波方式对灰度化的原始图像进行降噪,结果如图1所示。中值滤波方式能有效地去除图像中的椒盐噪音,但是相比较原始图像,车道线的边缘变得模糊。锐化滤波方式能增强车道线边缘的特征,有助于提取车道线信息,但是同时也强化了图像中环境区域的噪音。二维小波包分解方式结果介于中值滤波方式和锐化滤波方式,车道线边缘特征比中值滤波方式的结果要稍好些,但是要稍弱于锐化滤波方式。

(a)原始图像的灰度图

(b)二维小波包分解

(c)中值滤波

图1 3种滤波方式结果
针对未经滤波处理和经过3种滤波处理的车道线图像,本文采用Sobel算子进行车道线的边缘检测,检测结果如图2和表1所示。
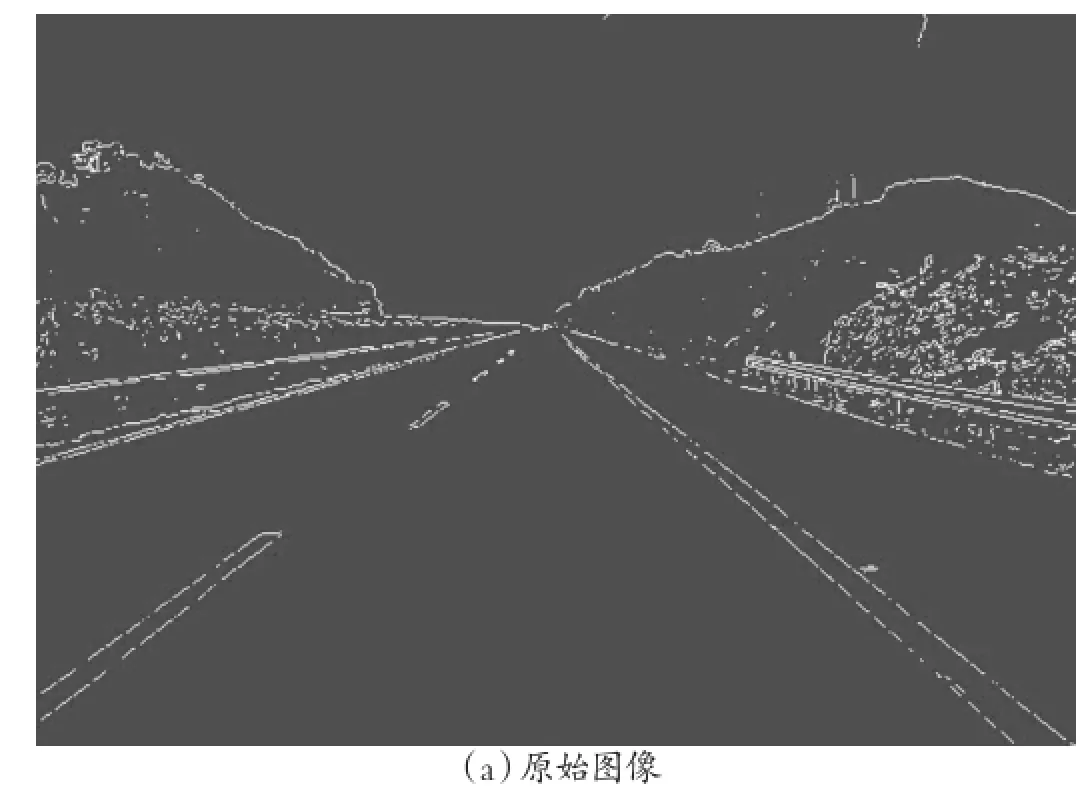
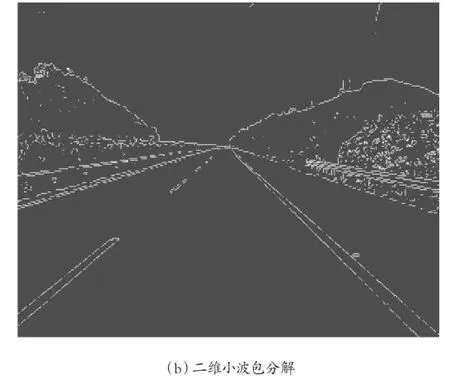
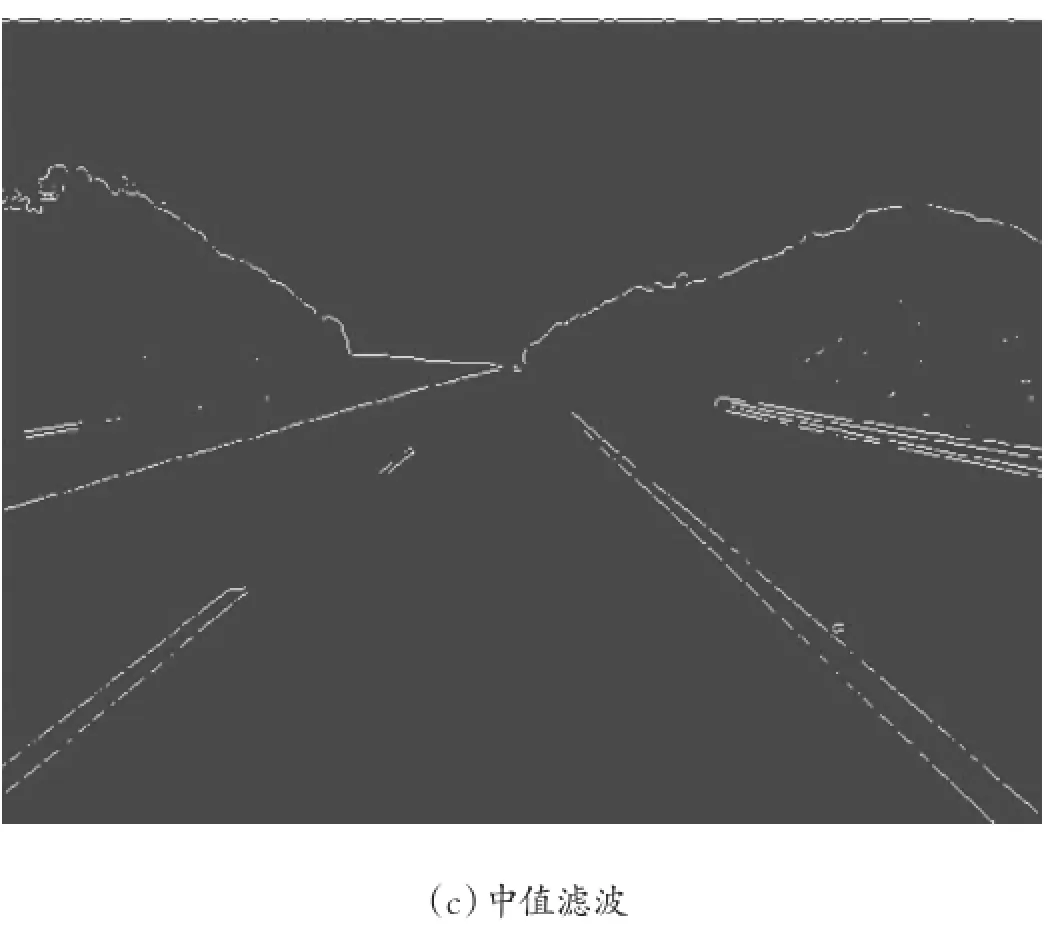
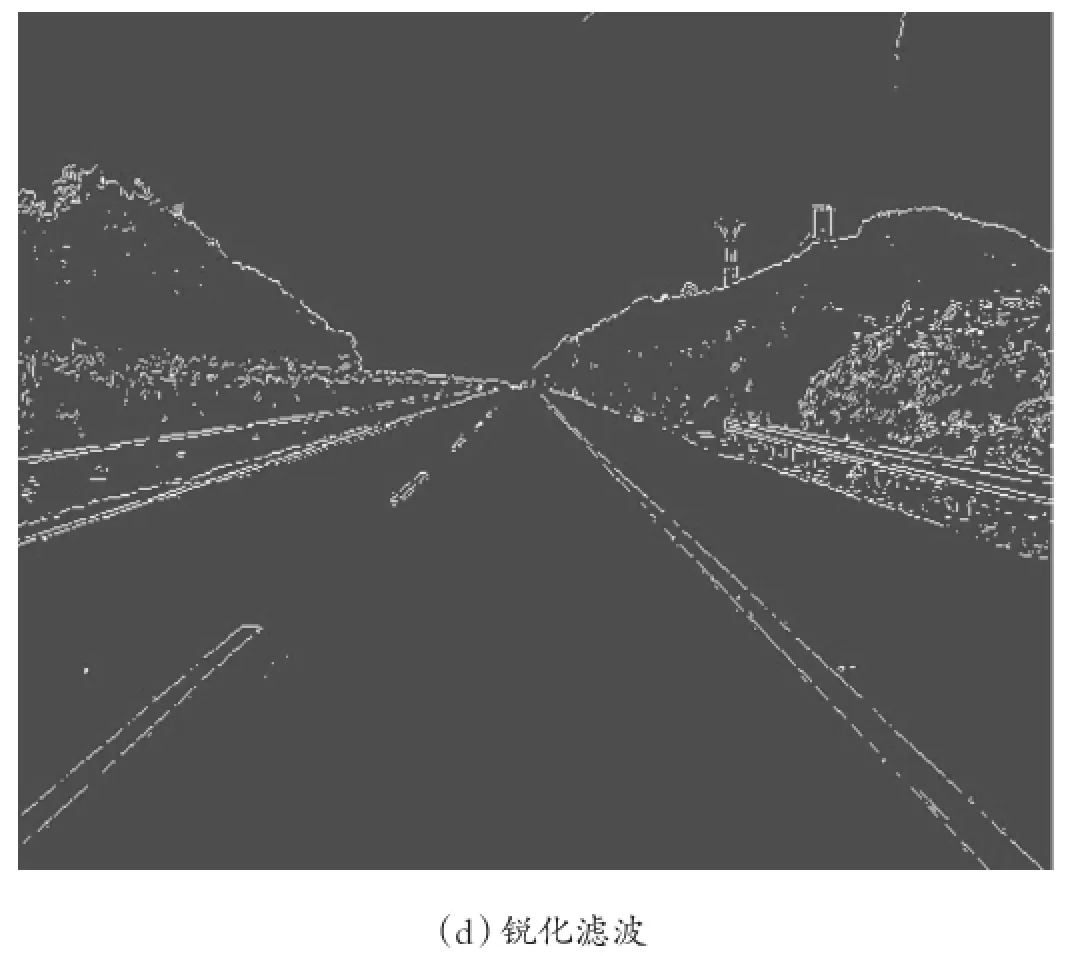
图2 3种滤波方式处理后的图像边缘检测结果
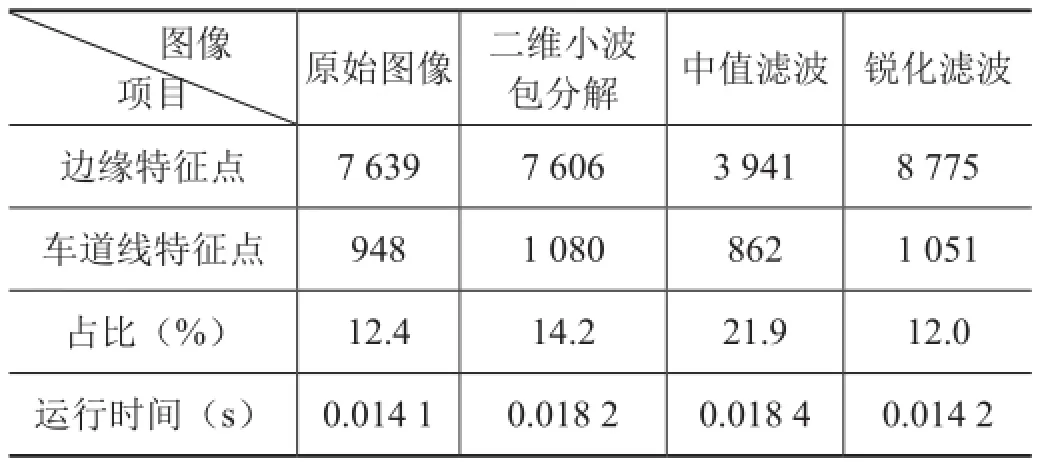
表1 3种滤波方式的图像车道线检测结果对比分析
对图2中的4幅图像设定感兴趣区域,确保该区域能够全部包围车道线图像信息,以此去除车道线以外的其他特征点,结果如图3所示。运行时间是指对图1进行边缘检测时程序执行的时间,每组循环测试1 000次,做4组,取每次运行时间的平均值。
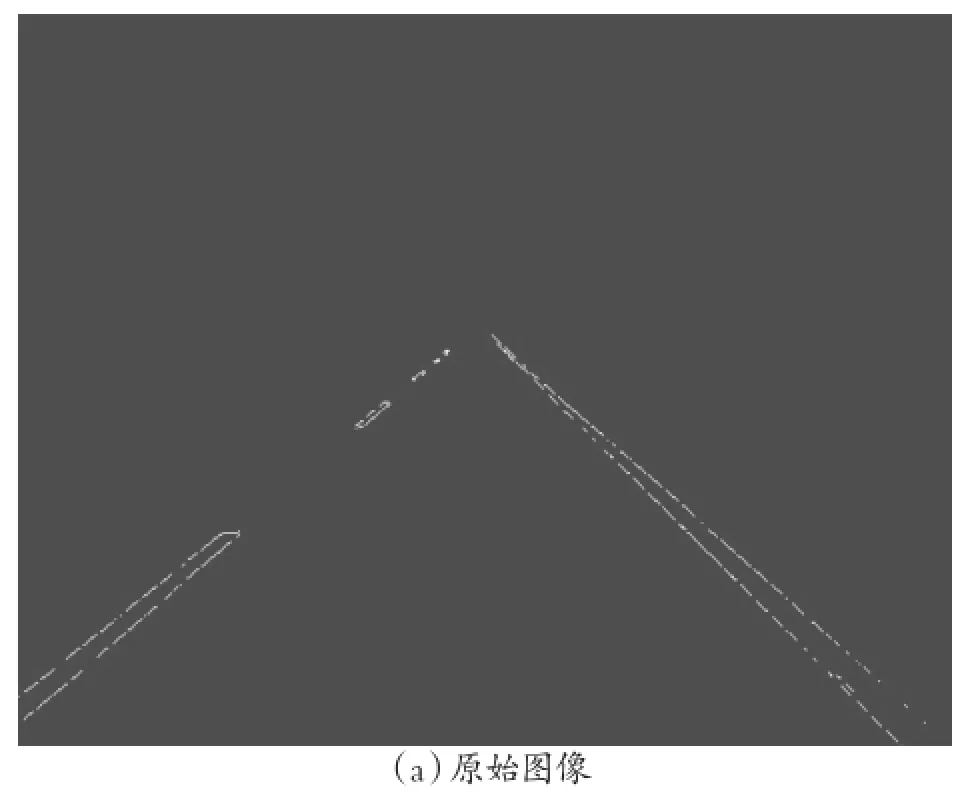
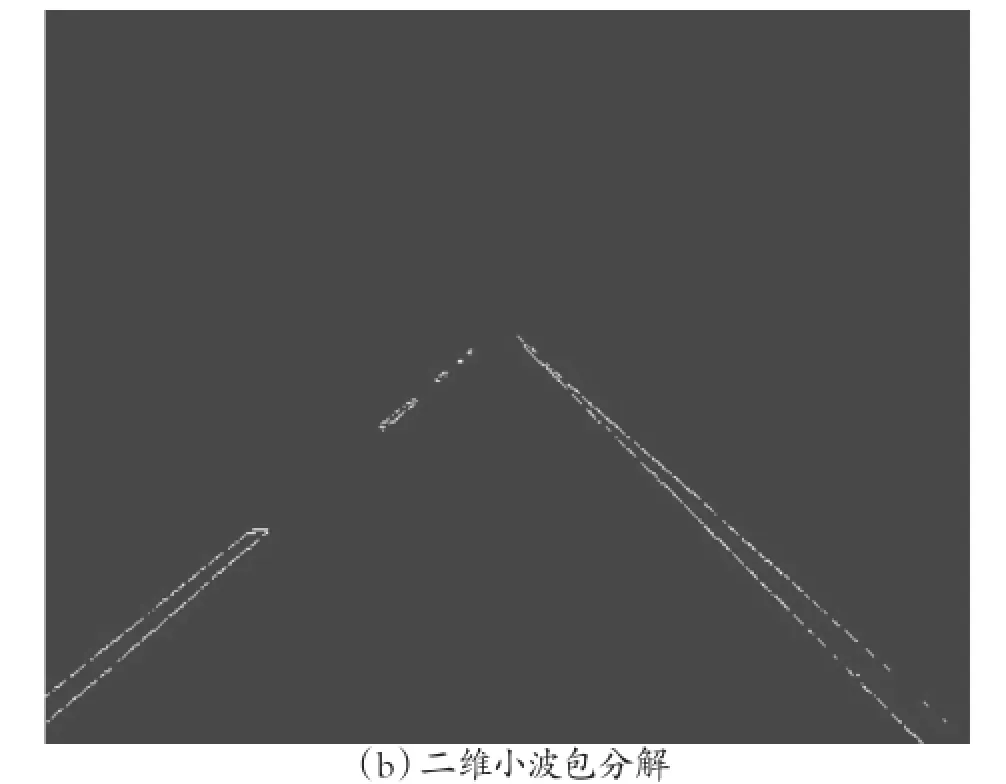
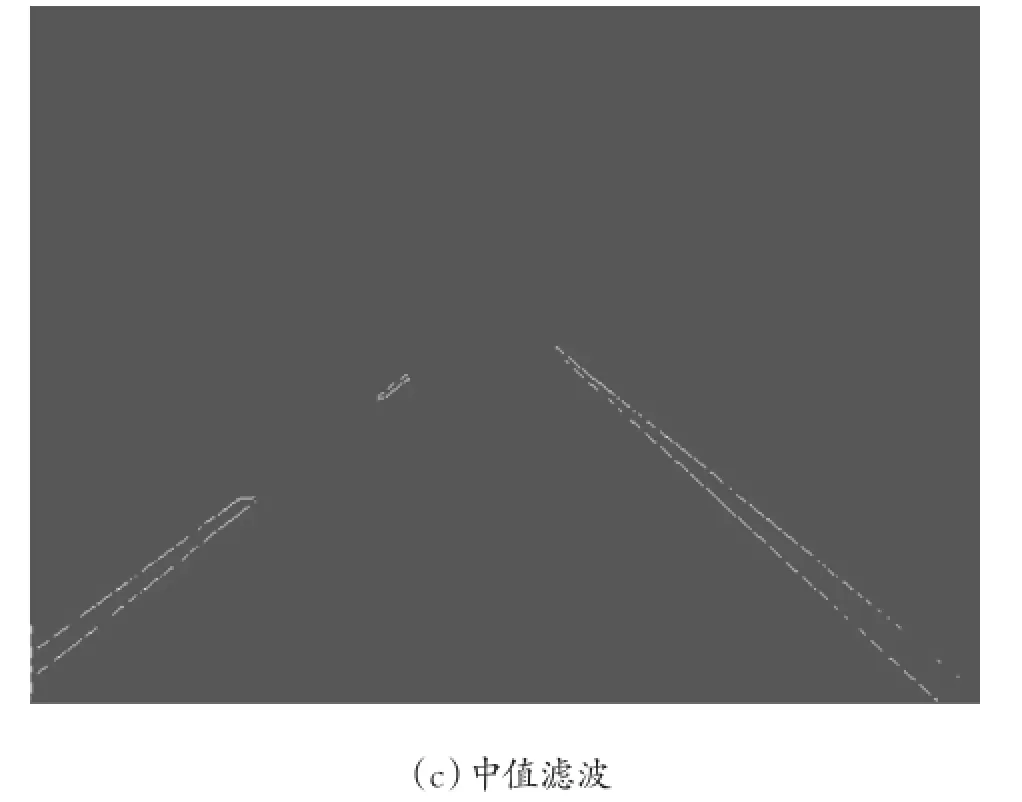
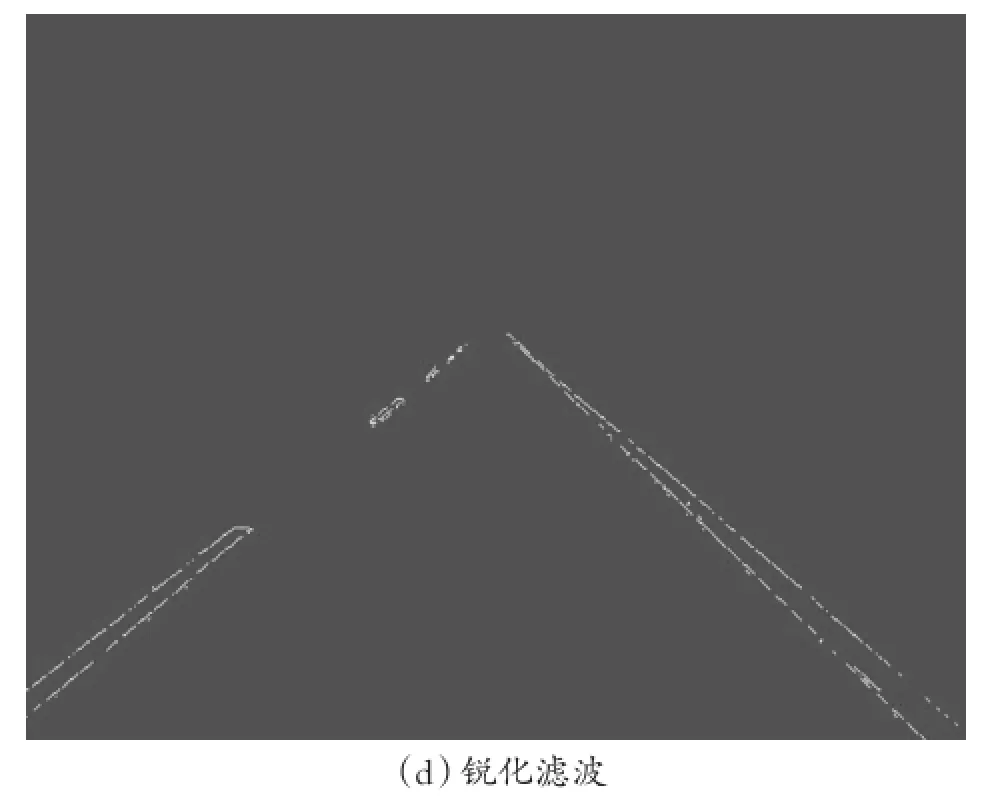
图3 3种滤波方式处理后的图像车道线检测结果
锐化滤波处理后图像的边缘有所增强,识别的边缘特征点数目最多,达8 775个,但是车道线特征点数目要较少于二维小波包分解滤波处理后的图像,运行时间0.014 2 s与未经处理的图像相近,快于另外两种滤波处理后的图像。中值滤波处理后图像的边缘变得模糊,因此,识别的边缘特征点数目和车道线特征点数目要小于另外3种情形。由于中值滤波能够把环境的椒盐噪间去除,模糊了干扰源的边缘,因此,其车道线特征点占边缘特征点的比值是最高的,达21.9%。
4 结语
本文通过对某一汽车常用工况下的车道线图像分别进行二维小波包分解滤波、中值滤波和锐化滤波,结果表明车道边缘强化方面,锐化滤波要强于另外两种,中值滤波最弱。为进一步了解3种滤波方式处理后的图像对车道线识别的影响,本文采用Sobel算子对未经滤波处理和经过3种滤波处理的车道线图像进行了边缘检测,结果显示二维小波包分解滤波处理后的图像能识别的车道线特征点数目最多,中值滤波处理后的图像尽管识别的车道线特征点数目最少,但是占比最高,锐化滤波处理后的图像识别速度最快。
[1]National Highway Traffic Safety Administration.Traffic safety facts 2007:NHTSA’s national center for statistics & analysis[R]. National Highway Traffic Safety Administration,2008.
[2]林广宇,魏朗,蹇小平.基于嵌入式的车辆偏离预警系统研究[J].电子设计工程,2010(18):26-28.
[3]秦洪懋.基于驾驶行为的车道偏离预警系统关键技术研究[D].南京:江苏大学,2014.
[4]张海林.基于电动转向的车道保持系统[D].北京:清华大学,2012.
[5]孔悦. 基于虚拟行驶环境下的汽车车道保持技术研究[D].吉林:吉林大学,2015.
[6]张德丰. 数字图像处理(MATLAB版)[M].北京:人民邮电出版社,2009.
[7]贺兴华,周媛媛,王继阳,等. MATLAB7.x图像处理[M].北京:人民邮电出版社,2006.
[8]杨丹,赵海滨,龙哲,等. MATLAB图像处理实例详解[M].北京:清华大学出版社,2013.
Comparable analysis of multiple filtering methods for lane line image recognition
Wu Zhijun, Ma Lincai, Liu Daxue
(Zhejiang institute of communications, Zhejiang 31112, China)
With regarding to the problem that results of the image pre-processing will affect the identification of lane line in its accuracy and speed,this paper chooses the decomposition filtering, median filtering and sharpening filtering of two-dimensional wavelet packet to filter the noise of the lane line image for the particular vehicle under common operating condition and the Sobel operator is used to test the the edge of the lane line images of those which has non-filtering processing and experienced three filtering processes.The results show that images,which have been processed by the decomposition filtering by the two-dimensional wavelet packet,identify the largest number of lane line feature points;images,which have been processed by the median filtering,identify the highest proportion of lane line feature points;images,which have been processed by the sharpening filtering have the highest identification speed.
lane line; decomposition filtering of two-dimensional wavelet packet ; median filtering; sharpening filtering
浙江省科技计划项目;项目编号:2015C31056。
吴志军(1989— ),男,浙江苍南,助教,硕士;研究方向:图像处理,智能汽车。