基于LabVIEW控制的小型太阳跟踪发电系统
2017-04-24孔丽晶曹艺严石鸿基郑晅丽陈晓航吴志明
孔丽晶,曹艺严,石鸿基,郑晅丽,陈晓航,吴志明
(厦门大学 物理系,福建 厦门 361005)


基于LabVIEW控制的小型太阳跟踪发电系统
孔丽晶,曹艺严,石鸿基,郑晅丽,陈晓航,吴志明
(厦门大学 物理系,福建 厦门 361005)
根据视日运动轨迹跟踪算法,以步进电机为执行机构,设计了基于LabVIEW和串口控制的太阳跟踪发电系统. 该系统通过计算机串口控制步进电机,带动太阳电池板实时、自动地跟踪太阳. 该设计提高了光伏发电系统的转换效率.
太阳能发电;跟踪系统;LabVIEW
太阳能作为一种绿色、可再生能源,其开发利用对缓解日益严峻的能源危机有着十分重要的意义. 然而,由于成本较高,光伏发电技术目前还未进入主流的电力市场. 为了提高地面光伏发电竞争力,可以通过聚光发电的形式,使光伏系统具有更优的性价比,而如何以较低的成本,便捷、准确地实现太阳跟踪是这项技术的关键. 太阳跟踪方式主要分光电式和机械式. 前者为被动跟踪,受环境影响较大(尤其在多云或阴雨天时);后者为主动式,指的是控制信号来自于控制器中预先存储的与当地经纬度相关的太阳运行轨迹函数,即视日运动轨迹跟踪法. 本文采用机械式跟踪方式,以步进电机作为执行机构,基于LabVIEW和串口控制,设计了小型太阳跟踪发电系统. 研究结果表明:该系统操作方便、运行良好、功能丰富.
1 系统机械结构
太阳能跟踪系统根据系统转动部件中所含转动轴的个数,可以将跟踪方式分为单轴跟踪和双轴跟踪. 由于太阳高度角每天变化不大,因此单轴跟踪一般都是在东西方向上跟踪太阳方位角变化,而高度角只作季节性调整. 双轴跟踪则是同时控制系统方位角和高度角,既跟踪太阳东升西落,又跟踪太阳在一年四季的仰角变化. 由于双轴跟踪精度较高,故其发电量一般会比单轴高10%,但其系统构成相对复杂,成本和能耗也高[1]. 考虑到系统造价、维护成本,以及实际的使用环境,本项目采用性价比相对较高的单轴跟踪方式,因此只需1台步进电机,且步进电机的选型及其安装位置考虑了系统的可行性及其能量消耗. 图1为发电系统的机械结构,全框架所用材料具有良好的散热性能[2].

图1 发电系统机械构架
2 硬件电路设计
用计算机控制步进电机一般的做法是在其扩展槽上安装步进控制卡,这种方法不仅成本较高,而且不便于操作. 近年来,出现了将计算机串口进行二次开发,用于电机控制的技术,具有成本低、操作简单、兼容性好等优点[3-9].
2.1 RS232串口控制步进电机工作原理
该系统用到的串口见图2(a),其发送数据的过程如图2(b)所示,大致为:先发送起始位(逻辑“0”)进行同步,接着按规定的波特率从低位到高位依次发送通讯数据的各二进制位,最后发送停止位(逻辑“1”). 可见,通过改变发送的字节数及所发送的字节内容,可在TXD(发送数据)端产生任意数量的脉冲,而改变波特率可动态调整发送脉冲的频率.

(a) RS232串口

(b) 串口发送数据过程
因此,若由计算机通过RS232接口向步进电机驱动器发出2路控制信号:一路以TXD信号作脉冲方波信号,控制步进电机的运转步数;另一路以RTS信号作方向电平信号,控制电机转动方向,则仅用1个串口就能够控制步进电机的运转[10].
2.2 接口电路设计
由于步进电机驱动器的接口并不是按照串口的标准来设计和连接的,因此,为了将串口引脚与电机驱动器的线路进行匹配,必须设计电平转换电路,从而实现RS232电平至TTL电平之间的转换,让计算机发出的信号能稳定、高效地传送到电机驱动器上. 图3为步进电机及其驱动电路的实物连接图,图4为串口电平转换电路.

图3 步进电机及其驱动电路实物图

图4 串口电平转换电路
3 系统软件设计
3.1 软件设计平台LabVIEW简介
LabVIEW是由美国国家仪器公司推出的虚拟仪器开发平台. 与传统的C和BASIC等基于文本语言产生代码的开发环境相比,LabVIEW使用的是流程化图形缩程语言,具有直观简单、易于操作的特点,可使没有丰富编程经验的工程人员从繁重的程序代码编写工作中解脱出来,将更多的精力放在测试上[11-14].
3.2 软件总体结构
太阳跟踪系统软件是在LabVIEW 8.20 环境中开发完成的,其主界面如图5所示,主要包括参量初始化、手动调整、自动跟踪及复位等.
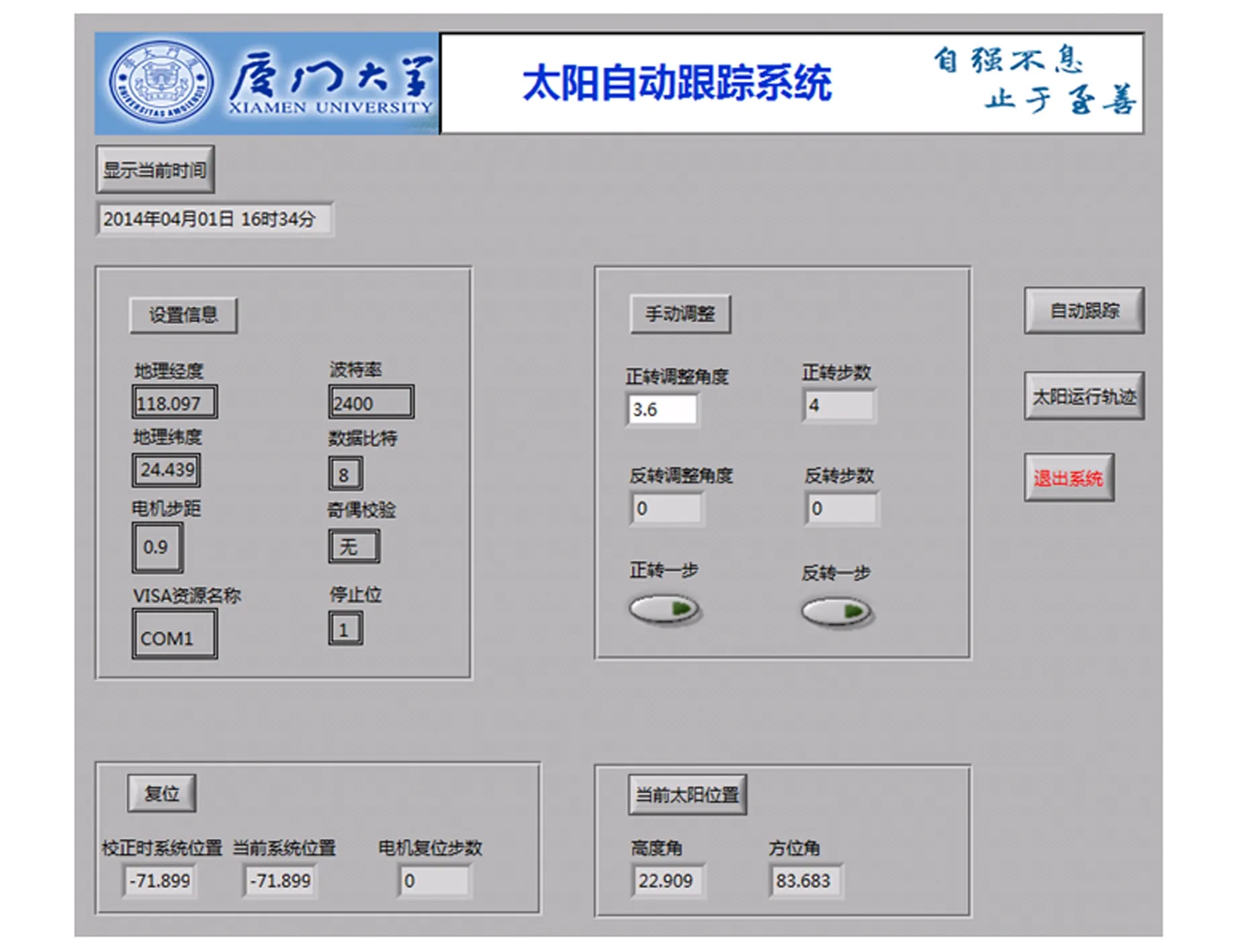
图5 软件主界面
程序设计思路是:跟踪开始前,先对系统参量进行初始化,包括当地的地理经度、纬度、步进电机的步距角、串口资源配置等. 初始化模块还用来判断跟踪系统是否位于机械原点,若不在机械原点则进行复位操作. 首次使用该系统时,需先校正机械系统原点,手动调整太阳电池板,使之正对太阳,并记录校正时间. 初始化工作完成后,启动自动跟踪,系统将自动获取计算机当前时间,判断其是否在预设的跟踪起止时间内. 如果当前时间不在预设的时间范围内,则系统进入等待状态,一段时间后重新判断当前时间是否满足跟踪条件;如果满足,则系统进入视日运动轨迹跟踪模式,计算出当前太阳位置与系统位置的差角,调整跟踪系统位置. 根据设计,系统每隔1 min计算1次目标位置与当前系统位置的差值,由软件通过串口控制电机,带动太阳电池板转向目标位置. 如此循环,直至时间到达预设的跟踪结束时间为止,然后系统自动复位,等待新的一天开始. 系统主程序流程图见图6.

图6 跟踪系统主程序流程图
3.3 太阳位置计算
天文学上,太阳的观测位置可根据当地的地理位置和时间来确定. 视日运动轨迹跟踪的原理正是根据太阳运行轨迹,由天文学公式计算出每一时刻的太阳高度角与方位角参量,再利用计算机带动跟踪装置,实现跟踪太阳的目的[15-20].
太阳位置计算程序严格按照相关天文学公式编制而成. 图7为厦门大学夏季某日08:57至17:00太阳方位角变化的软件计算结果.

图7 太阳方位角变化轨迹
3.4 步进电机控制程序
程序通过属性节点设置串口RTS引脚的状态并发送至RTS信号线上,作为控制电机转动的方向信号;同时将十六进制“FF”通过VISA写入函数发送到TXD引脚上,作为步进脉冲信号,脉冲数由程序循环次数决定. 因方向信号需先行于脉冲信号,故程序采用顺序结构加上一定的延时来实现. 图8为示波器实测的TXD(CH1通道)和RTS(CH2通道)引脚信号.

图8 示波器实测步进脉冲和方向信号
3.5 复位程序
输入校正时间后,程序自动计算该时刻的太阳方位角并存入文本jfr.txt,作为系统原点位置. 进行复位操作时,利用读取文本文件函数将文本jfr.txt和jr.txt中保存的角度值取出作差. 由于运行自动跟踪模块时,程序是以即时更新的形式将系统位置对应的角度存入文本jr.txt中,因此,当跟踪结束后,保留在该文本中的角度值就代表了当前系统的位置. 通过比较校正时系统位置与当前系统位置的角度差,就可以得到电机所需转动的步数,然后通过调用相应的电机控制程序,带动机械系统回零. 复位程序框图见图9.

图9 复位程序框图
4 结束语
本文从软、硬件两方面入手,根据视日运动轨迹跟踪算法,通过计算机串口控制步进电机,带动太阳电池板实时、自动跟踪太阳,从而提高了太阳电池对太阳光的转换效率,降低了发电系统成本. 实验表明:该系统不论是软件程序的运算执行,还是硬件设备的驱动运行,都基本实现了预期目标.
[1] 许启明,冯俊伟,宫明. 太阳能利用跟踪技术的研究进展[J]. 安徽农业科学,2011,39(10):6294-6297.
[2] 卢鑫. 基于聚光型光伏模组的太阳跟踪系统结构设计及性能分析[D]. 长春:长春理工大学,2010.
[3] 杨林,王晓光. Labview控制步进电机[J]. 微计算机信息,2004,34(2):7-8.
[4] 庄瑞荣,吴先球. 基于LabVIEW的步进电机控制[J]. 现代电子技术,2012,35(4):202-204.
[5] 王继业. 用串行口控制步进电机两维运动系统[J]. 微计算机信息,2007,23(7):130.
[6] 谢其德,张云云. 利用串口实现步进电机的控制[J]. 现代电子技术,2004,27(3):9-11.
[7] 陈晋玮,卢道华. 用VC实现PC机串口对步进电机的控制[J]. 微机发展,2003,13(5):55-56.
[8] 蒋敬,吴本科,高健,等. 虚拟仪器通过串行接口控制步进电机的设计[J]. 电子科技,2012,25(8):46-48.
[9] 吕红英,顾明华,李凌燕,等. 基于LabVIEW的亥姆霍兹线圈磁场自动测量系统[J]. 物理实验,2014,34(5):20-23.
[10] 隋振,李明哲,蔡中义,等. 一种直接采用计算机串行口控制步进电机的新方法[J]. 电子技术应用,2002,28(8):26-28.
[11] 张重雄. 虚拟仪器技术分析与设计[M]. 北京:电子工业出版社,2007.
[12] 陈锡辉,张银鸿. LabVIEW 8.20 程序设计从入门到精通[M]. 北京:清华大学出版社,2007.
[13] 王力,施芸城,杨忠杰,等. 基于LabVIEW的锁相放大器的设计与测量[J]. 物理实验,2015,35(9):33-36.
[14] 戴皓珽,倪晨,方恺,等. 基于LabVIEW研究硅光电池特性[J]. 物理实验,2014,34(10):18-25.
[15] Cooper P. The absorption of radiation in solar stills [J]. Solar Energy, 1969,12 (3):333-346.
[16] 中国科学院紫金山天文台. 中国天文年历仁[M]. 北京:科学出版社,1986.
[17] 马健,向平,赵卫凤,等. 基于步进电机的太阳跟踪系统设计[J]. 电力电子技术,2008,42(9):34-36.
[18] 张文青. 基于虚拟仪器的太阳能自动跟踪系统的研究与设计[D]. 南京:南京理工大学,2011.
[19] 路博. 光伏系统中的高精度太阳跟踪方法研究[D]. 新乡:河南师范大学,2012.
[20] 曾利霞. 基于视日运动轨迹的双轴太阳跟踪系统的研究[D]. 武汉:湖北工业大学,2012.
[责任编辑:尹冬梅]
Sun-tracking solar power system based on LabVIEW
KONG Li-jing, CAO Yi-yan, SHI Hong-ji,ZHENG Xuan-li, CHEN Xiao-hang, WU Zhi-ming
(Department of Physics, Xiamen University, Xiamen 361005, China)
Based on high-precision sun-tracking algorithm and LabVIEW platform, a sun-tracking solar power system was designed with a stepper motor as the executing agency. To automatically drive the solar panel to track the sun in real-time, the system used a computer to control the stepper motor through a serial port. The improved deign had a good human-computer interface, increased the conversion efficiency of the system.
solar power; tracking system; LabVIEW
2016-05-31
孔丽晶(1982-),女,福建莆田人,厦门大学物理系工程师,硕士,主要从事基础物理实验教学和太阳能电池研究工作.
TK513.4
A
1005-4642(2017)04-0011-05
“第9届全国高等学校物理实验教学研讨会”论文
