多旋翼无人机的电机关键参数确定方法
2017-04-20腾魏宗康郭子伟北京航天控制仪器研究所北京100039
吕 腾魏宗康郭子伟(北京航天控制仪器研究所北京100039)
多旋翼无人机的电机关键参数确定方法
吕 腾,魏宗康,郭子伟
(北京航天控制仪器研究所,北京100039)
通过直流电动机模型推导出PWM波的占空比与电机转速的模型,根据功率守恒方程和上述模型得出电机内阻、反电动势、自身力矩系数和螺旋翼的升力系数的计算方法。通过试验的方法测试安装有螺旋翼电动机的输入电流有效值、占空比和转速,并计算电动机的参数,最后带入到占空比与电机转速的关系模型中,验证以上推导出的模型和计算方法的合理性。结果表明模型的相对误差在3%左右。
电动机;PWM控制;多旋翼
0 引言
电机是旋翼无人机中的执行机构,控制器通过调节PWM波的占空比控制电动机的转速。在控制器中,占空比与电机转速的关系通过某一数学关系描述,所以其数学模型的准确性直接影响了旋翼无人机控制的结果。
目前,主要通过试验的方法测试占空比和转速和升力的关系曲线,从而获得旋翼动力装置参数测试和数学模型。虽然这种方法获得的关系式可以作为电机模型并参与控制器的设计,但是该模型中的数据缺乏具体的物理含义和严格的数学推导过程。
本文从经典的直流电动机模型入手,推导出PWM波的占空比与转速的关系模型。根据功率守恒方程和直流电动机模型导出电动机关键参数的计算方法,并通过试验验证模型的实用性。
1 直流电动机模型
根据电压平衡方程和力矩平衡方程建立直流电动机的模型:
其中,电机力矩L为电感,u为输入电压,R为内阻,i为电流,ke为感应电动势系数,ωm为电机的角速度,J为定子和负载的转动惯量,Tm为电机的输出力矩,Td为电机的负载力矩。其中,Tm=kmi,km是电机的力矩系数且数值上等于ke,用ke替代km。
多旋翼的电动机的负载分为电动机自身的转动阻力力矩和螺旋翼的阻力力矩,其中螺旋翼产生的阻力力矩与其转速的二次方成正比:
其中,a是螺旋翼的阻力力矩系数,b为电机自身的阻力力矩系数。将式(2)带入式(1)并且在ω0位置将线性化。
其中,x=表示系统状态,A=表示系统方程,输入函数为B=
2 包含PWM的执行环节模型
PWM通过对电机进行高频率的开通和关断来实现对电机速度的控制,当电机达到稳态时,电动机开始通电的状态x0和下一个周期开始通电时的状态xT相同。所以,根据线性系统理论有如下公式:
式(6)为输入电压。其中,λ为PWM的占空比,U为电源的电压。由于式(4)是线性系统,所以Φ(T,0)=eA(T-0),代入式(5)中得:
PWM的频率在10KHz左右的量级,其周期T很短。将式(7)在0点处进行Taylor展开并保留一次项,得到近似解:
式(9)的电机的电压补偿模型为:
式中,占空比和电压只以乘积的方式影响电机的电流和角速度,即通过调节占空比和电压均可改变电机的状态。当λU为定值时,占空比固定只调节电压U,和电压U固定仅调节占空比的效果相同。说明PWM调速等效于将电机的输入电压调整到λU,即式(11)所示。
3 试验设备
试验所用的设备和各装置的连接关系如图1所示。螺旋翼、电动机、电子调速计组成被测部分;遥控器和接收机组成控制部分,用于控制输入PWM的占空比;转速表和电源可以读出电机的转速和输入的有效电流值。
试验的步骤如下:
1)设置电源电压:断开电源与电调的连接,打开直流电源并设置输出电压(例如11.1V),然后连接电源和电调。
2)设置遥控器油门行程:将遥控器的油门拨到最大,然后打开遥控器听到正常提示音(依据具体的电调而定)后将油门拨到最小听到正常的提示音后,再断开和接通电调与电源的连接。
3)转速与占空比试验:调节遥控器的油门到指定的位置,然后在转速计上读出此时的转速。
4)重复步骤1,设置新的电压,然后按步骤进行下一轮试验。
4 电机参数确定方法
试验中采用外转子式电动机、二叶桨螺旋翼。将转子简化为薄壁圆筒,螺旋翼简化为细直杆,然后计算转子和螺旋翼总体的转动惯量。
式中,m1是转子的质量,r是转子的半径,m2是螺旋翼的质量,d是螺旋翼的直径。
根据能量守恒定律,电调输入的能量主要包括电动机做的功和线圈中消耗的能量,建立如式(13)所示的功率方程。
因为电源电压U、输出电流I和电机的转速ω均为已知,所以可以根据最小二乘法计算电阻R、螺旋翼负载力矩系数a和电机自身力矩系数b。
令式(1)的左边等于0,两个方程联立约去电流i得式(14),然后计算出电动势系数ke。
5 试验结果和模型验证
5.1 试验结果
试验分两次进行。第1次分为4组试验,主要目的是验证PWM调速等效于将电机的输入电压调整到λU的结论;第2次试验是电源输出的有效电流与电动机转速的关系。试验数据分别如表1和表2所示。

表1 试验数据1Table 1 Test data 1

表2 试验数据2Table 2 Test data 2
5.2 模型验证
使用第4节的方法计算试验中所采用的电动机的参数,其具体数值如表3所示。
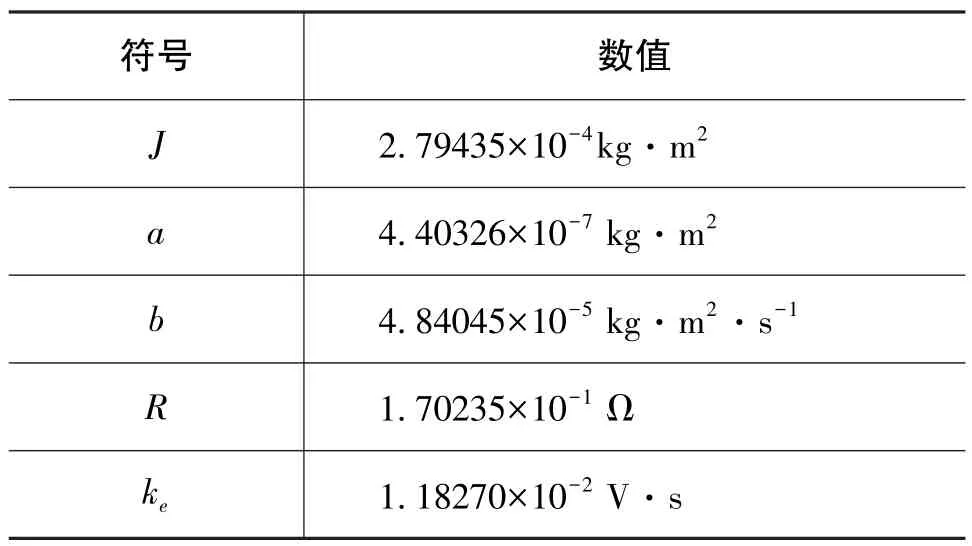
表3 试验所用的电动机参数Table 3 Parameter of the BLDC motor
观察表1中的数据得出,在占空比与电源电压的乘积相同的情况下,电动机的转速相近。为了更好地分析不同情况下转速的差异,本文计算了试验数据与模型结果的相对误差,如图2所示。
图2中,星形、圆圈、方形、菱形分别表示第1组、第2组、第3组和第4组的相对误差。4组试验的相对误差的平均值分别为6.7%、4.4%、2.6%、1.4%,所以电压大的与模型的吻合度高,建议使用电压高的电池供电。其中,虚线位置的相对误差为3%,实际中空比与电压的乘积大于4.44V,说明第4节中介绍的参数计算方法具有实用价值。
6 结论
本文通过传统的直流电动机模型推导出PWM控制电机转速模型,其中调节PWM占空比等效于将电机的输入电压变为电源电压与占空比的乘积。通过功率方程和直流电机方程推导出电机中关键参数的计算公式,通过试验计算了某一直流无刷电动机的参数,并且回代到PWM控制模型中。结果表明试验结果与模型结果在电压大于4.44V时相对误差小于3%,说明计算的参数具有实际应用价值。
[1] Bouabdalla S,Murrieri P,Siegwart R.Design and control of an indoor micro quadrotor[C].Proceedings of the IEEE International Conference on Robotics and Automation,2004.
[2] 张琛.直流无刷电动机原理及应用(第2版)[M].北京:机械工业出版社,2004.
[3] ZHANG Chen.Principle and application of BLDC motor (2nd)[M].Beijing:China Machine Press,2004.
[3] 江斌.小型四旋翼低空无人机飞行器综合设计[D].浙江大学,2013. JIANG Bin.The design of a small and low⁃altitude un⁃manned quadrotor aircraft[D].Zhejiang University,2013.
[4] Im W S,Liu W X,Kim J M.Sensorless control of 3⁃Phase BLDC motors using DC current model[C].IEEE Energy Conversion Congress and Exposition,2014.
[5] Lin Q B,Lu X F,Guo X H,et al.The simulation of sen⁃ sorless control of BLDC based on the counting of PWM Pulses[C].IEEE Conference and Expo Transportation E⁃lectrification Asia⁃Pacific,2014.
[6] Xia C L,Fang H W.Permanent⁃magnet brushless DC motor and its control[J].Transactions of China Electro⁃technical Society,2012,27(3):25⁃34.
[7] Matsui N.Sensorless PM brushless DC motor drives[J]. IEEE Transactions on Industrial Electronics,1996,43 (2):300⁃308.
Method of Determining the Motor Key Parameters in Multi⁃rotor UAV
LV Teng,WEI Zong⁃kang,GUO Zi⁃wei
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
A relationship,between the duty cycle of PWM and angular velocity of DC motor,is derived from the classic DC motor model.Based on power conservation equation and the above model,a calculation method is proposed to get the internal resistance,the electromotive force constant,the motor viscous friction constant and the rotor torque con⁃stant.The parameters of a real motor,mounted a rotary⁃wing,are calculated through above method with input effective cur⁃rent,duty cycle and angular speed data.Finally,comparing the angular velocity obtained by the above mentioned model with test in the same duty cycle,the results show that the relative error is about 3%.
DC motor;PWM control;multi⁃rotor UAV
T
1674⁃5558(2017)03⁃01258
A 文章编号:1674⁃5558(2017)03⁃01258
10.3969/j.issn.1674⁃5558.2017.02.019
吕腾,男,硕士,导航、制导与控制专业,研究方向为飞行器控制。
2016⁃03⁃27