基于TDOA的超声波二维定位系统的设计
2017-04-15苏鑫臧俊斌
苏鑫+臧俊斌


摘要:该文介绍了一种基于到达时间差算法的超声波定位系统。系统通过对超声波信号到达探测节点之间的时间差进行计算得到精确可靠的定位坐标并显示于上位机软件。针对定位过程中引起误差的多种因素进行了分析并加以修正,有效地提高了定位精度7cm到10cm,实验结果验证了本设计达到了应用需求。
关键词:超声波;空间定位;TDOA
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2016)34-0267-03
Abstract: This paper introduces a kind of ultrasonic positioning system related to the time difference of arrival(TDOA). By calculating the time different between the detection node and the ultrasonic signal, the system obtain precise and reliable location coordinates and make these being displayed in upper computers software. In the meantime, aiming at a variety of factors, which make positioning process give rise to error, the system analyze and correct them in order to effectively improve the positioning accuracy that promote from 7cm to 10cm. Finally, the experimental results verify that the design reach the applied requirements.
Key words: ultrasonic; spatial location; TDOA
近年来,三维空间的精准定位技术在工业和生活中的需求越来越多。自动化仓储、焊接机器人和3D打印机等应用场景下对定位技术的要求不断提高,新兴的VR和AR等技术同样需要丰富的空间定位技术的支持。
通过测量信号达到若干节点的时间差来计算信号源所在位置的方法叫做TDOA定位技术,它具有定位精度高、定位速度快和抗干扰能力强的优点。
超声波测距是一种抗干扰能力比较强的非接触式测距方法,相比红外、激光和无线电等测距方法,超声波不受光线、物体颜色等因素影响,且具有构造简单成本低的优点。
1 系统定位原理
二维平面内的定位需要至少三个不共线的节点。信号源周期性发出信号,当其中一个节点首先收到信号时将该节点时间差记为0,并开始计时。分别记录信号到达另外两个节点的时间距离到达第一个节点的时间差。假设三个节点的时间差分别为[tA]、[tB]、[tC],三个节点及其坐标分别为A([xa],[ya])、B([xb],[yb])、C([xc],[yc]),信号源坐标为([x],[y])。通过以下方程组可解得信号源坐标位置:
非线性方程组(1)直接求解很困难,一般采用泰勒级数展开法和Chan法。泰勒级数展开算法只有在迭代运算的初始值比较准确的条件下才能快速收敛。Chan法具有计算量小的优点,但是在节点数目少于三个的情况下精度不高。
考虑到方便安装节点和提高定位精度并简化计算,将三个节点位置设置为A(0,[ya])、B(0,0)、C([xc],0),方程组(1)将简化为:
解方程组(2)便可得到定位点坐标。
2 系统硬件设计
2.1 硬件系统概述
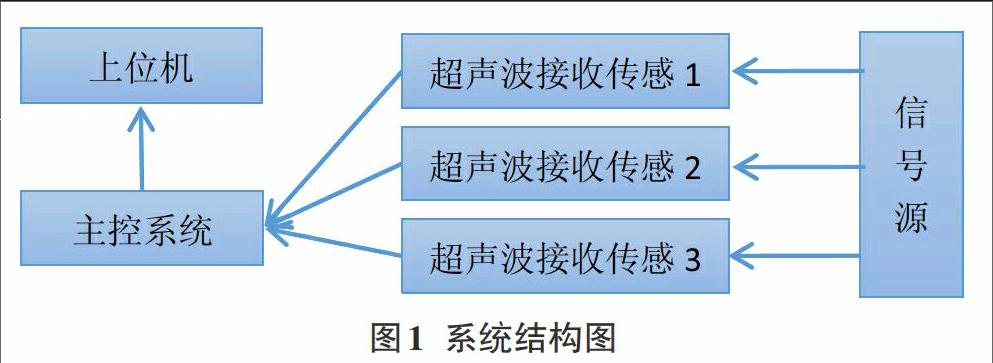
超声波三维定位系统包括硬件系统、上位机监控软件和系统API三部分。超声波三维定位系统结构图如图1所示。
超声波定位系统中超声波发射器作为被定位点发射超声波,通过多个超声波接收传感器采集超声波信号,MCU记录时间差并通过上述算法对数据进行处理来确定定位点的坐标,最后使用串口向上位机或焊接机器人等设备发送定位结果。
2.2 电源模块设计
电源模块的功能是为整个硬件电路供电,使硬件系统能够稳定地运行。当电源电压不稳定而产生波动时,单片机可能会因此丢失数据或发生复位甚至是宕机。本系统采用ASM1117系列穩压器为系统提供稳定可靠的5V电压。ASM1117的应用电路简单,只需要配合采样电阻和滤波电容就能够很好地工作。
2.3 主控芯片
本系统主控芯片选用STC15W4K16S4,该单片机抗干扰能力强,内部有16K程序储存空间,4096字节RAM,四个串口和四个外部中断,完全满足定位系统的需要。
2.4 超声波传感器模块
超声波传感器选用TCT40-16收发分体式换能器,其发射声压在117dB以上,接收灵敏度≥-65dB,中心频率为40kHz,满足系统的工作需求。
单片机GPIO端口的输出功率小,无法直接驱动超声波传感器发出超声波,所以采用74HC04组成的推挽式电路进行功率放大以便使发射距离足够远,满足测量距离要求。电路图如图2所示。输出端上拉电阻R1,R2,一方面可以提高反向器74HC04输出高电平的驱动能力,另一方面可以增加超声换能器的阻尼效果,缩短其自由振荡的时间。
超声波接收电路采用CX20106A集成电路对超声波接收传感器收到的信号进行放大和滤波,抗干扰能力好,灵敏度高。电路如图3所示,中心频率约42kHz,当收到超声波信号时管脚7输出一个下降沿来触发单片机外部中断。
3 定位误差及修正
3.1 环境温度影响及其修正
环境温度主要对超声波声速产生影响,而声速的精度直接影响着系统的定位精度。超声波在空气中传播时,其速度[C]与温度[T]的关系如下:
式中[T]为摄氏温度。
系统使用体积小精度高的温度传感器DS18B20测量环境温度来修正误差。
3.2 时间差误差的影响及其修正
在到达时间差的定位算法中,由于信号到达各节点的时间差是定位的依据,所以由时间测量不准确而产生的误差对定位精度的影响是最大的。超声波测距原理如下:
其中[t]是系统测得的时间差;[t0]是实际时间差;[dt]是时间差的误差,为常数项,主要由驱动电路和超声波传感器的响应延迟和单片机的相应延迟等组成。
为了修正时间差误差的影响,进行时间差误差测试实验。在间隔不等的直线上将超声波发射传感器和超声波接收传感器正对放置,测量多组时间差并与真实时间差对比,测得时间差误差为0.09ms。所以真正的时间差为:[t0=t-0.09]。
4 实验结果
为检验系统定位的效果,选择某仓库空地进行定位实验。在仓库中划定一个二十五平方米的方形区域作为实验场地,将三个超声波接收器放置在任意不共线的三个点处,并将其所在点的坐标设定到系统中。
在实验场地中任意设定定位点并在定位点放置超声波发射器,开启定位系统记录定位坐标和实际坐标。实验结果如下:
5 结束语
本设计将到达时间差定位技术应用于超声波二维定位中,误差修正的引入使得定位准确度较好,误差小于5cm,平均误差3.2cm。采用VB.NET编写了上位机桌面程序,实现了对定位系统的实时监控,可以对定位点进行实时追踪。
参考文献:
[1] 杨俊峰, 张丕状. 基于Chan算法和Taylor级数混合算法的到达时差定位[J]. 核电子学与探测技术, 2013, 33(4):480-482.
[2] 吴琳. 室内定位技术探讨[J]. 江西测绘, 2013(2).
[3] 赵奇, 樊奔. 提高超声波测距精度的方法[J]. 中国西部科技, 2007(9):47-48.
[4] 吴新章, 张焕武. TDOA定位技术系统实验[J]. 中国无线电, 2010(6):46-47.
[5] 劉哲, 陈日林, 滕鹏晓,等. 基于平面传声器阵列的声源定位系统[J]. 声学技术, 2011, 30(2):123-128.
[6] 周康磊, 毛永毅. 基于残差加权的Taylor级数展开TDOA无线定位算法[J]. 西安邮电大学学报, 2010, 15(3):10-13.
[7] 姚世选, 李宝良, 蒋晓伟,等. 基站式声源定位系统的研究与设计[C]. 2009全国虚拟仪器大会论文集(一). 2009.
[8] 钱政, 王中宇, 刘桂礼. 测试误差分析与数据处理[M]. 北京:北京航空航天大学出版社, 2008.
