基于神经网络的车辆跟驰模型
2017-04-15王振文
王振文
摘要:本文提出了一种改进的车辆跟驰模型。基于神经网络的原理,在战略、战术和具体操作三个层次上对驾驶员行为进行全方位的分析,借助于速度、加速度、反应时间、 GPS 数据对神经网络进行训练,选取合适的神经网络层数、节点数以及合适的训练方法,利用误差反向传播( BP)算法,可以很好地实现对未来一个时刻车辆行为的预测。
关键词:神经网络 车辆跟驰 智能系统
中图分类号:U491 文献标识码:A 文章编号:1007-9416(2016)12-0081-01
引言
微观模型越来越多的被应用于评估新的智能运输系统。车辆跟驰模型就是其中之一[3]。车辆跟驰模型基于这样的假设:后车司机受到一系列变量的影响,车辆的行驶受到人的影响最大,所以建立模型实际上就是将人的驾驶技巧转化成智能系统。为了得到高保真度的微型仿真,人们主要是研究战术层面的行为。
1 神经网络的应用
人工神经网络(Artificial Neural Networks, ANN),一种模仿动物神经网络行为特征,进行分布式并行信息处理的算法数学模型[1]。这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。人工神经网络具有自学习和自适应的能力,可以通过预先提供的一批相互对应的输入-输出数据,分析掌握两者之间潜在的规律,最终根据这些规律,用新的输入数据来推算输出结果,这种学习分析的过程被称为“训练”。
2 车辆跟驰行为分析
人的驾驶行为可以分为三个层次:分别是:战略、战术和具体操作。战略的驾驶行为主要是路线的规划,战术的驾驶行为就是实现短期的目标,比如:超车,换道等,操作层面的驾驶行为就是具体的动作如:方向盘旋转,刹车行为等。车辆跟驰行为具有很强的非线性特性[2]。
ANN(artificial neural networks)可以用来解决复杂和不明确的问题。
基于数据的学习可以提取出数据中输出与输入之间的关系,它们之间的关系是复杂的、非线性的、难以精确获得的。而神经网络可以通过学习提取出数据之间蕴藏的规律,以较高的精度来预测将来的数据。
对车辆跟驰行为更加精确的模拟应该考虑到人反应的非线性和人感知的局限性。也就是说,驾驶员不能精确地感知相对速度和距离,做出决定的过程是非线性的。人工神经网络可以找到驾驶员感知到的变量和驾驶员控制动作变量之间的映射关系。这使得神经网络系统可以模拟和预测驾驶员的行为。
3 数值仿真
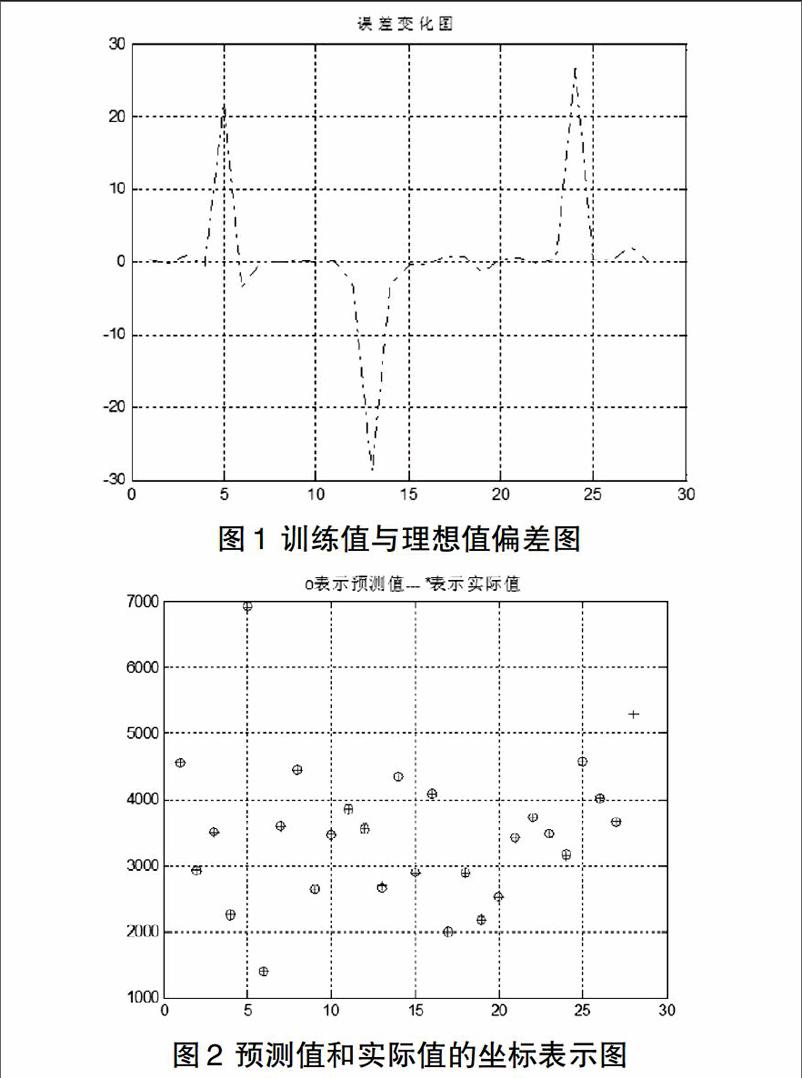
训练时,实验选取了27组输入变量(每组输入变量有三个元素),每组输入变量会有一个理想输出。也就是说,一共有27个输出值构成了一个行向量。用来检测的输入向量输入到训练好的神经网络中,同样输出27个元素的行向量。在MATLAB中画出这两个向量,进行比较,得出训练效果。图1表示训练值与理想值的偏差,误差绝对值可控制在30个单位之內,图2表示预测值与实际值的位置坐标。
4 结语
本文针对传统车辆跟驰模型存在的预测不准确,计算繁杂,实用性不高等缺点,提出了基于神经网络的车辆跟驰模型,首先分析了神经网络的应用原理和领域,其次分析了神经网络在车辆跟驰模型上应用的可行性,最后通过MATLAB数值仿真验证理论的正确性,证明了神经网络的方法可以提高模型预测的准确性。
参考文献
[1]韩立群.人工神经网络教程[M].北京:北京邮电大学出版社,2006:20-25,87.
[2]Khodayari A, Ghaffari A, Kazemi R, et al. A modified car-following model based on a neural network model of the human driver effects[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2012, 42(6): 1440-1449.
[3]黄婧祎.车车通信环境下耦合映射跟驰模型与超网络研究[D].上海:同济大学,2013.
