直接转矩控制在无刷双馈电机应用中的仿真研究
2017-04-15侯春
侯春

摘要:本文结合无刷双馈电机的特殊结构以及传统直接转矩控制策略的原理,分析了无刷双馈电机直接转矩控制的基本原理,在此基础上建立了无刷双馈电机直接转矩控制的仿真模型。本文对此模型在亚同步状态下对其起动特性和带载调速进行了仿真,并通过实验数据分析进行了验证,证明了此种控制方式是在此种模式下是可行的。
关键词:无刷双馈电机 直接转矩控制 仿真研究
中图分类号:TM921.5 文献标识码:A 文章编号:1007-9416(2016)12-0006-03
1 无刷双馈电机直接转矩控制的基本原理
无刷双馈电机在运行时类似于绕线式感应电机,不过其极性有别于传统,无刷双馈电机的功率绕组pp和控制绕组pc分别相当于绕线式感应电机的定子绕组和转子绕组,依据绕线式感应电机转矩与磁链的关系,提出无刷双馈电机的转矩与磁链的关系式为:
式(1)中p为极对数,L为感应系数,为磁链,为率绕组与控制绕组磁链的夹角,其中下角标p、c分别表示功率绕组和控制绕组。
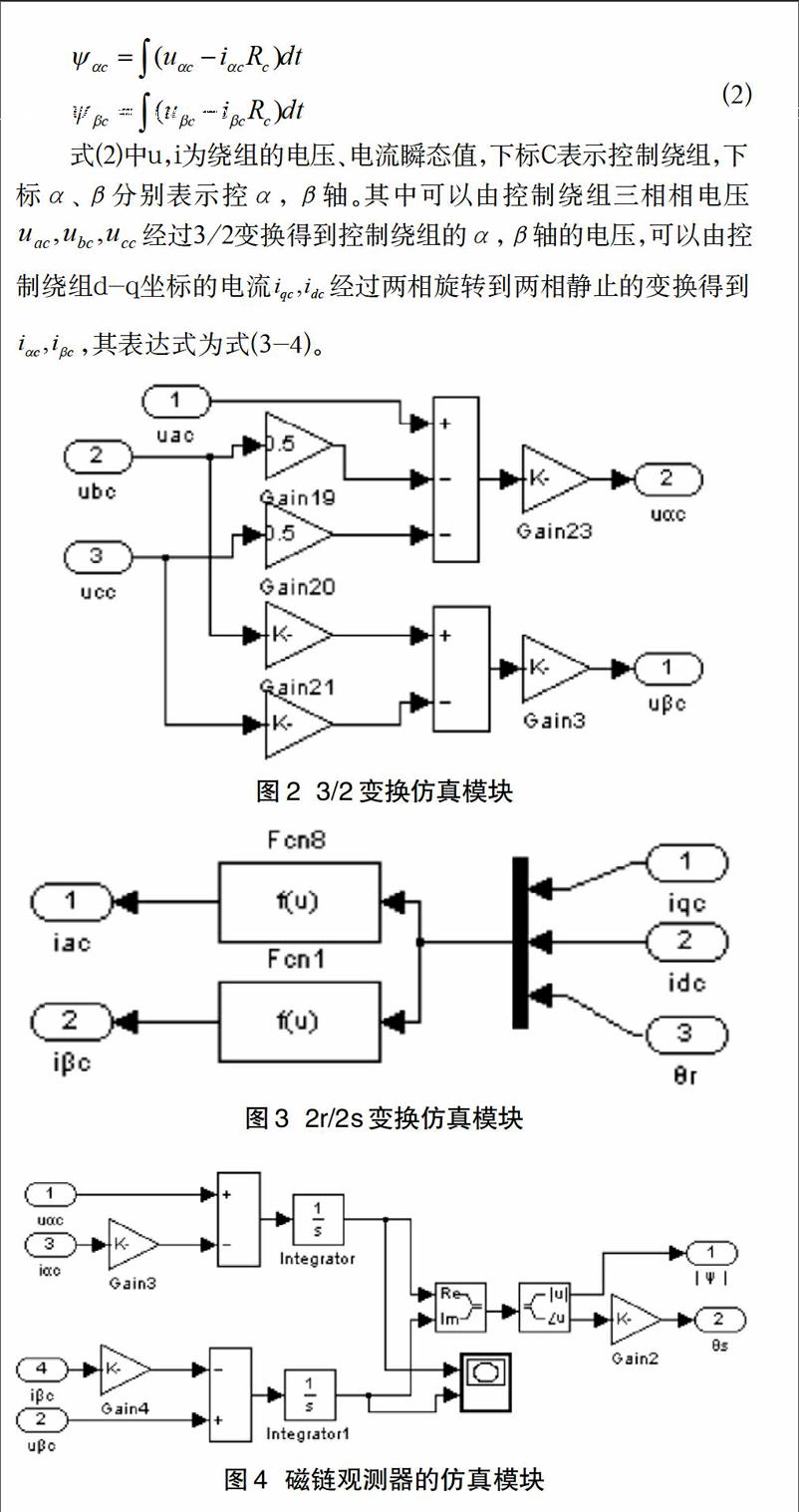
2 无刷双馈电机直接转矩控制系统的仿真模型
2.1 无刷双馈电机的直接转矩控制的仿真模型
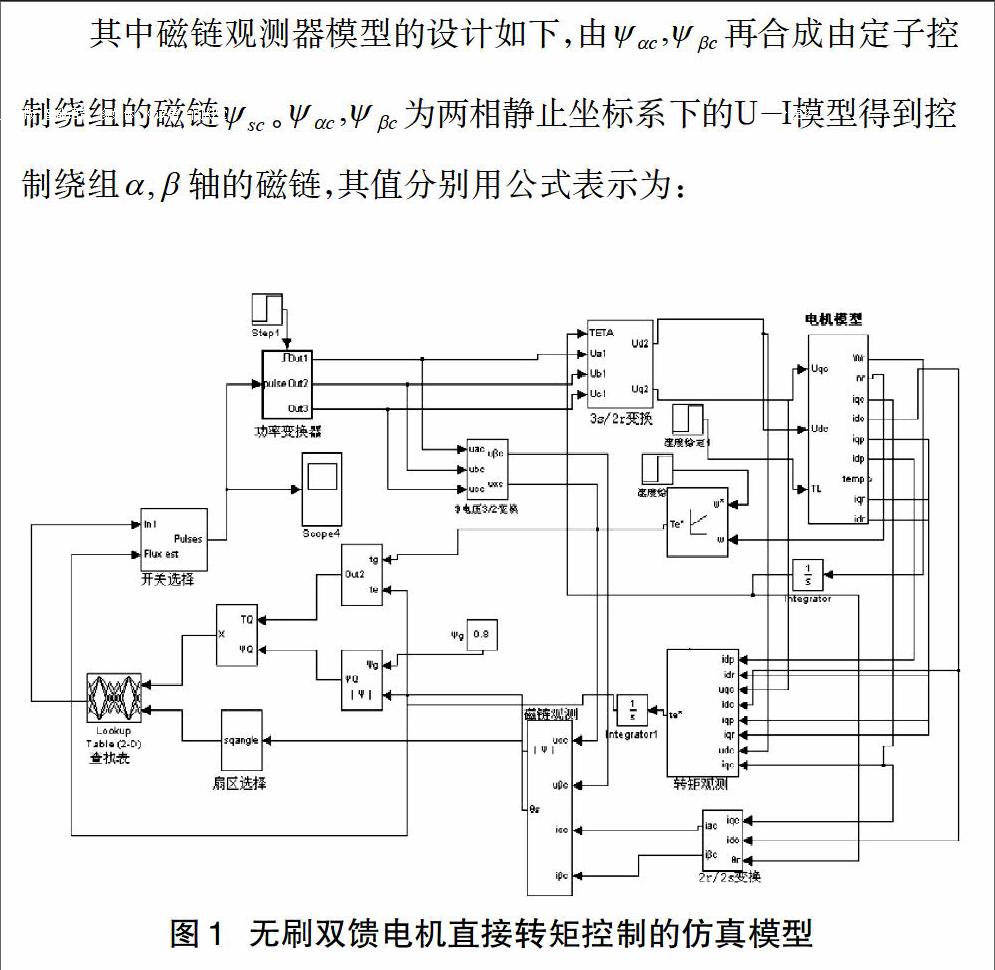
根据无刷双馈电机、直接转矩控制的原理,本文将总体的仿真模型分为磁链观测器,转矩观测器,磁链调节器和转矩调节器,速度调节器,磁链扇区的判断及开关状态表的建立,逆变器和查找表的输入与输出七个部分,分别搭建仿真模型,由这七个仿真模型构成无刷双馈电机的直接转矩控制的仿真模型,如图1所示:
磁链观测器的搭建仿真模型如图4所示。
2.2 控制系统的仿真波形分析
仿真实验中,对无刷电机在亚同步、同步以及超同步模式下,分别进行了模拟仿真,均取得良好的控制效果。本文仅以在亚同步状态下的启動特性和带载调速进行研究分析。
2.2.1 在亚同步状态下起动特性的仿真研究
图5为无刷双馈电机在亚同步电动状态下空载起动特性,图5(a)表示亚同步电动状态下空载起动电磁转矩波形,图5(b)表示亚同步电动状态下空载起动转速波形,由图5(c)可见控制绕组的电流频率为3Hz,且与功率绕组图5(d)的电流反相序。从图5(a)(b)(c)(d)中可见控制绕组、功率绕组的两相电流波形为正弦波,0.2s之前时电机单馈启动到1000 r/min,0.2s时调节给定转速为700r/min,经过0.4s的调节后电机基本上稳定在700r/min,电磁转矩稳定在0N.m。 定子侧控制绕组的磁链给定为0.8wb,由图5(e)可见,直接转矩控制的定子控制绕组的空间磁链轨迹为圆形,变化频率与电流同步。磁链幅值基本保持不变,维持在给定磁链值0.8wb,可见磁链能够得到很好的控制。
2.2.2 在亚同步状态下带载调速时的仿真研究
图6为无刷双馈电机在亚同步电动状态下带载调速时的波形,其中负载为恒转矩负载。仿真时,负载转矩保持5N.m,起动2.75s后转速突变,由650r/min变化到725r/min,功率绕组的电流图6(d)幅值减小,控制绕组的电流图6(c)幅值基本保持不变。图6(a)中在转速突变的时刻,对应图6(b)中电磁转矩Te虽然有波动,但是经过较为短暂时间的调节后,又稳定在和负载转矩相等的值。
3 结语
电机能够比较稳定的运行,从而验证直接转矩控制方式可以有效地对无刷双馈电机进行控制,且具有有很好的鲁棒性和快速性。
参考文献
[1]William R.Brassfield, René Spée, Thomas G. Habetler. Direct torque control for brushless doubly-fed machines[J].IEEE transactions on industry applications, 1996(5):1098-1104.
[2]姚俊,马松辉.Simulink 建模与仿真[M].西安:西安电子科技大学出版社,2002.
[3]李夙.异步电动机直接转矩控制[M].北京:机械工业出版社,1994.
[4]邓先明.无刷双馈电机的电磁设计分析及控制策略的研究[D].中国矿业大学,2007.
[5]张爱玲,张洋.基于转矩预测控制的无刷双馈电机直接转矩控制系统[J].电机与控制学报,2007(4):326-330.
