空管二次雷达数据仿真系统的设计与实现
2017-04-14郭金亮
姜 鹏,张 喆,郭金亮
空管二次雷达数据仿真系统的设计与实现
姜 鹏1,张 喆2,郭金亮1
(1. 中国民航珠海进近管制中心,广东 珠海 519015;2. 中国民航大学,天津 300300)
主要研究了空管二次雷达数据仿真系统的设计思路与实现方式。利用大地坐标投影算法实现雷达目标从WGS84空间坐标到平面直角坐标的转换,并将转换后的平面直角坐标进行平移,得出雷达目标相对于雷达站的距离以及方位。结合以上参数,按照ASTERIS CAT001标准雷达数据帧格式对雷达目标的各参数信息进行编排,封装成HDCL同步数据并发送,实现二次雷达数据仿真的目的。二次雷达数据仿真系统具有广泛的推广前景和应用价值,可以被广泛应用于雷达数据研究、空管自动化系统告警测试等领域。
雷达;数据仿真;空中交通管理;地图投影;坐标转换;ASTERIX
0 引言
目前,已被广泛应用于民用航空领域的空管二次雷达,来源于空战中区分敌我双方飞机的敌我识别系统,将其与飞行计划信息处理结合而形成的空管自动化系统是目前空中交通管制行业实施雷达管制的主要手段。近年来伴随着我国航空事业的不断发展,航班量不断增加,空域流量愈加繁忙,二次雷达作为对空监视的主要手段,对其数据的分析和研究已逐渐成为空管核心数据研究的热点;相关研究成果的投入使用,对实际的空管安全运行及工作效率的提升都会起到很大的帮助[1]。
由于雷达设备构造复杂,价格昂贵,在科研以及教学领域很难以直观、经济的方式进行数据分析和研究,而利用计算机仿真技术却可以很好满足这一需求[2,3]。在国内,对雷达数据仿真技术的研究尚刚刚起步,二次雷达数据的模拟仿真系统也较多,但功能大多与空管实际业务相差较大,或只侧重对雷达信号的分析处理而缺乏仿真输出的功能,或仿真的效果与实际需要出入较大,无法直接应用等;此外,现空管单位使用二次雷达仿真系统普遍存在数据输出格式单一,受限于特定空管自动化系统的情况,不便于市场推广应用。本文介绍了空管二次雷达数据仿真系统的设计思路,通过地图投影、坐标系转换等技术完成空管二次雷达数据仿真系统地搭建,并按照ASTERIX标准格式进行数据编排,以UDP网络数据[4]或者HDLC数据格式输出,理论上不受自动化系统数据格式限制,可直接应用于各类空管自动化系统;此外,本文所涉及的系统还支持对多种格式雷达数据的解码分析,可用于空管雷达数据质量监视或进一步分析处理等。
1 二次雷达数据仿真系统的设计思路
二次雷达系统的工作原理是通过地面雷达询问与机载应答机的应答,来快速获取飞机的应答机编号、高度、距离、方位等参数,再通过计算机系统的处理即可将目标信息显示在计算机屏幕上。要实现二次雷达目标在处理中心屏幕上的动态显示,需要对雷达目标位置及背景地图数据进行投影和坐标系转换等一系列处理并按照标准的雷达数据格式进行封装输出,因此数据仿真系统的总体设计由三部分组成:地图投影、坐标系转换、ASTERIX标准格式数据封装,整个过程如图1所示。
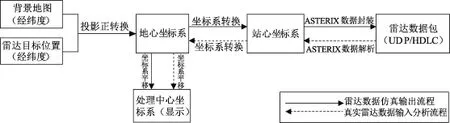
图1 二次雷达仿真系统设计原理Fig.1 Design principle of Secondary Radar Simulation System
2 大地坐标系投影
大地坐标系是大地测量工作中所使用的基准坐标系,大地坐标系的确立需要确定一个大小和形状与大地体相近,且两者位置相对固定的旋转椭球作为参考椭球,参考椭球面是大地测量计算所使用的参考面,地面上任何点的坐标均可以通过大地经度L、大地维度B以及大地高度H三个参数来表示。目前世界各地根据本国大地测量使用不同的参考椭球,但比较通用的是WGS-84大地坐标系,其坐标原点为地球质心,采用国际大地测量与地球物理联合会第17届大会大地测量常熟推荐值[5],如表1所示。
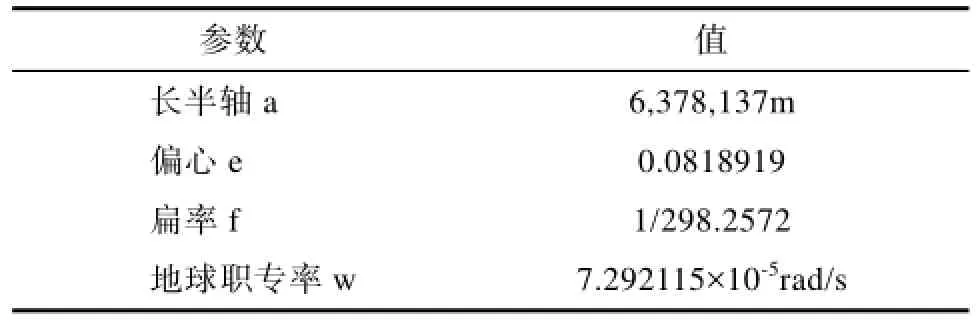
表1 WGS-84参数
在确定参考椭球体后,需要将以参考椭球体基准面所确定的球面坐标转换为平面直角坐标,即利用一定的数学算法将大地坐标系中的经线和纬线投射到平面上,这种技术称之为地图投影。但由于地球球体本身的不规则形,因此导致其无法展开形成一个平滑的曲面,因此至今没有任何一种数学算法能做到绝对的精确无误,由此按照不同的需求产生了多种投影方法。本文采用在WGS-84椭球体上的高斯-克吕格(Gauss-Kruger)投影方式,它的投影原理是设想一个与椭球面中央子午线横切的椭球圆柱。以中央子午线为中心,两侧按照一定的经度差投影于圆柱表面,再将圆柱表面按照南北极方向的母线剪开,形成的平面即为高斯投影平面[6]。高斯投影平面的原点为中央子午线与赤道投影线的交点,中央子午线方向为x轴,赤道方向为y轴,构成了高斯-克吕格投影直角坐标系。高斯-克吕格投影长度和面积上的变形较小[7],在我国大、中比例尺地图的投影中多采用该方法。
高斯投影的正算就是已知大地坐标(L,B)求解高斯投影平面坐标(x,y),其计算公式为[8]:
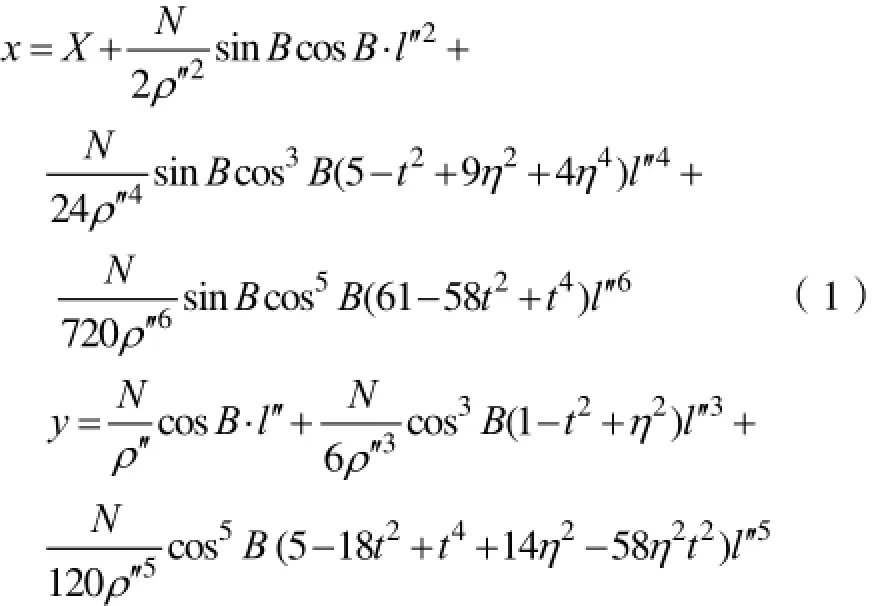
式1中,角度均为弧度。X为子午线弧长,l′′=L-L0(L0为中央子午线经度),t=tgB,(ab、为椭球体长短半轴),N=,称作极曲率半径)。
高斯投影的反算就是已知高斯投影平面坐标(x,y),求解大地坐标(L,B),其计算公式为:

t
3 坐标系转换
在输出想要仿真的二次雷达数据,首先要确定雷达数据包中各参数的值,由于雷达输出的数据是以雷达的坐标为中心的站心坐标系,要仿真输出二次雷达数据,首先得由于是文献[5]对各类坐标系转换的方法进行了对比,得出采用地心坐标系作为统一坐标系进行转换可以较少地球曲面误差的结论[9],本文中也采用类似方法,以地心坐标系作为统一坐标系进行坐标转换。
3.1雷达目标地心直角坐标系到站心极坐标系的转换
在雷达数据仿真的目的是动态的输出雷达数据,以模拟真实雷达目标的运动轨迹,按照标准ASTERIX雷达数据帧的格式要求,在目标坐标、速度矢量等参数已知的前提下,需要将雷达目标的地心坐标转换为以雷达站为中心的极坐标,即雷达目标相对于雷达站的距离(rho)、方位(theta),如图2所示。
3.1.1 计算目标相对于雷达站的距离
假设雷达站的投影坐标为(Xradar,Yradar),雷达目标的投影坐标为(Xp,Yp),根据勾股定理就可以计算出目标相对于雷达站的距离,方法如下:

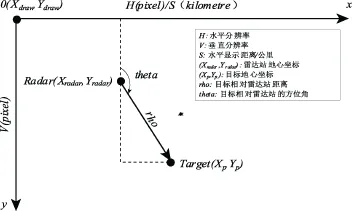
图2 目标相对于雷达的距离和方位推算Fig.2 Distance and orientation of the target relative to the radar
3.1.2 计算目标相对于雷达站的方位
雷达目标相对于雷达站的方位(theta)是指雷达站与目标之间连线与雷达站正北方向的顺时针夹角,计算雷达站的方位需要考虑象限因素的影响。
当目标位于雷达站为中心的第一象限时,计算方法如下:

当目标位于雷达站为中心的第二、三象限时,计算方法如下:

当目标位于雷达站为中心的第四象限时,计算方法如下:3.2地心坐标系到处理中心坐标系到的平移

如何将已知经纬度坐标的目标动态的显示在雷达处理中心的屏幕上,除了完成2.1中大地坐标与地心坐标之间相互转换外,还需要实现屏幕坐标与地心坐标的二次转换,由于处理中心雷达屏幕坐标与地心坐标均为二维平面坐标,因此这种转换是通过X轴、Y轴坐标平移的方式进行的[10],转换步骤如下。
3.2.1 确定处理中心雷达屏幕显示范围以及显示比例
用S表示屏幕水平显示的最大地理距离,W表示屏幕的水平分辨率,假设屏幕水平显示范围S=400公里,屏幕的水平分辨率W=800像素,那么很容易得出屏幕显示比例,即S/P=400/800=0.5公里/像素。
3.2.2 根据中心点的地心坐标推算绘图点的投影坐标
用(centerX、centerY)来表示屏幕中心点的地心坐标,(drawX、drawY)来表示绘图原点的地心坐标;一般来说,使用各类计算机语言进行编程时,绘图原点均为画布的左上角,如图3所示:其中V为屏幕垂直分辨率,H为屏幕的水平分辨率。
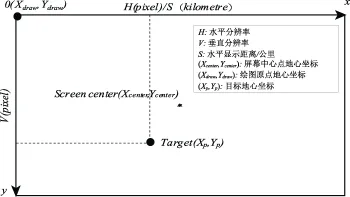
图3 目标在屏幕上的位置推算Fig.3 Target location on the screen
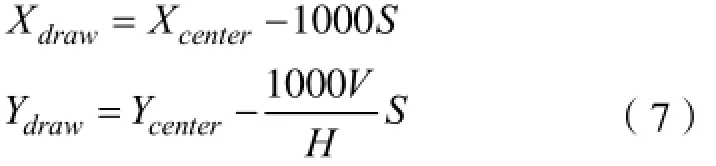
那么在知道中心点地心坐标的前提下,可以根据屏幕长宽比推算出绘图原点的地心坐标,计算方法如下:
3.2.3 计算目标在处理中心雷达屏幕上的显示位置
假设某雷达目标地心坐标为(pX,pY),那么可以根据其相对于绘图原点(drawX,drawY)的相对位置以及屏幕显示比例/SP得出该目标在屏幕上所显示的像素位置(px,yp),计算方法如下:

4 ASTERIX雷达格式数据仿真输出
ASTERIX是多用途结构化欧控监视信息交换(All purpose Structured Eurocontrol suRveilance Information eXchange)的缩写,是欧洲民航合作组织(ECAC)制定的监视设备和自动化系统信息交换的标准。ASTERIX标准是为雷达数据的传输和交换而专门定义的应用/表述协议,它是一个雷达目标参数集合,定义了用于交换的空管监视信息的详细结构:下至每一个比特的编码,上至数据块的组织便于实现异构的监视设备和/或自动化系统之间的信息交换。ASTERIX标准参照ISO/OSI(开放系统互联)模式中的表述层及应用层(第6,7层)而制定,数据的传输可以使用低层的通用协议,如TCP/IP,X.25,HDLC等,目前ASTERIX雷达数据传输主要采用HDLC协议[11]。
4.1ASTERIX数据帧构成
数据块(Data Block)是ASTERIX应用实体(空管自动化系统、雷达系统)间信息交换的基本单位,由数据类型字段、长度字段、记录字段组成,如图4所示。

图4 ASTERIX数据帧格式Fig.4 Format of ASTERIX Data Block
1、数据类别(Data Category):对传输的内容进行分类,如CAT001(目标信息),CAT002(服务信息),CAT008(气象信息)等。
2、记录(Record):某种数据类别的实体单位,如CAT001的一个记录用于描述一个雷达目标,CAT002的一个记录用于描述一个雷达服务(正北/扇区)信息。一个记录由一个域规格字段(FSPEC)和若干个数据域(Data Field)组成。
3、域规格字段(Field Specification,FSPEC):
FSPEC位于一个记录的最前面,定义了一个记录里面实际包含的数据域。
4、数据域(Data Field):用于描述记录(Record)中数据条目(Data Item)的具体实现内容。一个记录里面由若干个数据域组成,FSPEC里面规定了该记录(Record)中所包含的数据域类别,如雷达目标信息类下面的:雷达SAC/SIC地址码,MODE-C高度等。
4.2ASTERIX CAT001数据帧输出
雷达仿真程序中,应用最多的是CAT001(目标信息)类型的ASTERIX标准数据帧,表2列举了其包含的部分常用Data Field。将上文中计算出来的雷达参数按照CAT001数据帧进行封装,以实现雷达数据仿真输出的目的,仿真效果如图5所示。
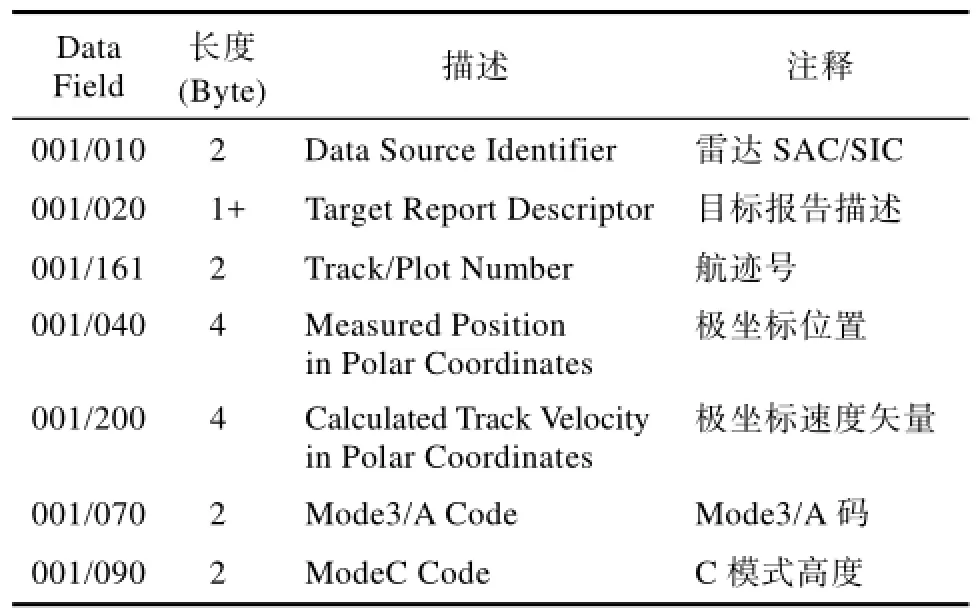
表2 ASTERIX CAT001数据条目
5 结论
本文给出了二次雷达仿真系统的设计理念以及实现方法。先利用高斯投影算法实现大地坐标系到投影坐标系的坐标转换,再通过坐标系平移,完成雷达目标投影坐标到到处理中心雷达屏幕显示位置的映射。动态测算雷达站与目标之间的相对位置,其与目标速度、二次代码等信息以ASTERIX标准数据帧的格式进行封装并发送。该仿真系统的研发涉及坐标投影、雷达仿真等专业领域,具备较高的学术价值;从推广前景来看,该系统使用便捷,扩展性强,可广泛的应用于雷达数据模拟仿真以及民航空中交通管理等领域。
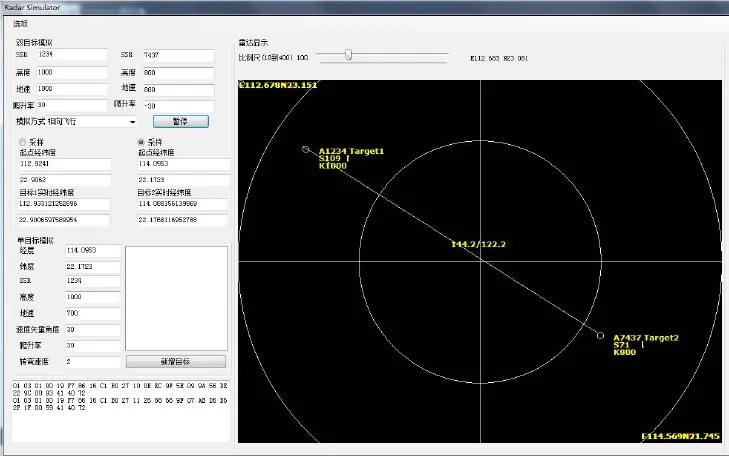
图5 仿真目标在屏幕上显示Fig.5 The simulation target display on screen
[1] 刘小兵, 俞静一, 赵玉奎. 二次雷达工作模式发展展望[J].软件, 2012, 33(4): 78-80.
LIU X B, YU J Y, ZHAO Y K. Advances of the Secondary Surveillance Radar work mode[J]. Computer Engineering & Software, 2012, 33(4): 78-80.
[2] 李任增, 文福安. 通信原理虚拟实验仿真平台的设计和实现[J]. 软件, 2013, 34(6): 1-4.
LI R Z, WEN F A. Design and Implementation of Virtual Experiment Simulation Platform Based on Communication Theory[J]. Software, 2013, 34(6): 1-4.
[3] 符应彬. 计算机虚拟技术在现代制造业中的应用[J]. 软件, 2013, 34(5): 83-84
FU Y B. Computer Simulation Technology in The Modern Manufacturing Applications. Software, 2013, 34(5): 83-84
[4] 罗星星, 蒲保兴, 赵颖, 等. 随机网络编码数据传输的仿真实现[J]. 软件, 2014, 35(8): 32-37.
LUO X X, PU B X, ZHAO Y, et al. Simulation and Implementation of Data Transmission Based on Random Linear Network Coding. Software, 2014, 35(8): 32-37.
[5] 金宏斌, 徐毓, 董峰. 雷达信息处理系统中的坐标变换问题研究[J]. 空军雷达学院学报, 2003, 17(3): 54-58.
JIN H B, XU Y, DONG F. Research on Coordinate Transformation Under Radar Information Processing Systems[J]. Journal of Air Force Radar Academy, 2003, 17(3): 54-58.
[6] 孙东磊, 赵俊生, 郭忠磊. 对高斯投影与横轴莫卡托投影差异的研究[J]. 海洋测绘, 2011, 31(1): 9-11.
SUN D L, ZHAO J S, GUO Z L. Research on Difference Between Gauss-Kruger Projection and Transversal Mercator Projection[J]. HYDROGRAPHIC SURVEYING AND CHARTING, 2011, 31(1): 9-11.
[7] 盖森, 熊伟, 刘建忠, 杨斌. 基于Proj.4的空间坐标转换[J].测绘工程, 2012, 21(2): 29-38.
GAI S, XIONG W, LIU J Z, YANG B. Spatial coordinate transformation based on Proj.4[J]. ENGINEERING OF SURVEYING AND MAPPING, 2012, 21(2): 29-38.
[8] JUIE ZHU. Conversion of earth-centered earth-fixed coordinates to geodetic coordinates[J]. IEEE Transactions on AES, 1994, 30(3): 957-962.
[9] 李锋, 金宏斌, 马建. 多雷达数据处理中坐标转换的新方法[J]. 微计算机信息, 2007, 23(4): 303-305.
LI F, JIN H B, MA J C. A New Method of Coordinate Transformation Under Multi-Radar Data Processing System[J]. MICROCOMPUTER INFORMATION, 2007, 23(4): 303-305.
[10] 苏志刚. 雷达视频地图的坐标转换[J]. 中国民航学院学报, 1999, 17(1): 16-18.
SU Z G. The Coordinates Conversion on the Radar Map[J]. JOURNAL OF CIVIL AVIATION UNIVERSITY OF CHINA, 1999, 17(1): 16-18.
[11] 华炜. 浅析标准雷达数据格式ASTERIX[J]. 民航科技, 2001, 2: 14-18.
HUA W. Analysis of Standard radar data format ASTERIX[J]. CIVIL AVIATION SCIENCE & TECHNOLOGY, 2001(2): 29-38.
Design and Implementation of Secondary Radar Signal Simulation System
JIANG Peng1, ZHANG Zhe2, GUO Jin-liang1
(1. Zhuhai Terminal Air Traffic Control Center.CAAC, Zhuhai 519015, China; 2. Civil Aviation Uniaversity of Chiana, Tianjin 300300, China)
This article design and implementation of multi radar signal simulation system. To achieve the conversion of level rectangular coordinate radar target WGS84 space geodetic coordinate coordinates by using the transverse Mercator Projection algorithm, the plane coordinate conversion of the X, Y axis coordinate translation, the target relative to the radar station distance and azimuth, arrangement of all kinds of parameter information of radar target in accordance with the Asterix standard CAT001 radar data frame format, packaging a HDCL synchronization signal to realize the purpose of simulation. The results show that the multi radar signal simulation system is widely used, and can be widely used in the field of Civil Aviation Radar, ATC automation system and radar signal simulation.
Radar; Signal simulation; Air traffic control; Map projection; Coordinate transformation; ASTERIX
TP391.9
: A
10.3969/j.issn.1003-6970.2017.02.003
国家自然科学基金委员会与中国民用航空局联合资助项目(U1633107)。
姜鹏(1983-),男,工程师,硕士,主要研究方向:空中交通管理。
姜鹏(1983-),工程师,主要研究方向:空中交通管理。
本文著录格式:姜鹏,张喆,郭金亮. 空管二次雷达数据仿真系统的设计与实现[J]. 软件,2017,38(2):10-15