大型望远镜主镜位置采集系统设计*
2017-04-13栾红民李玉霞吴庆林曲云昭
栾红民,张 斌,李玉霞,吴庆林,王 晶,曲云昭
(1.中国科学院长春光学精密机械与物理研究所,长春130033;2.中国科学院大学,北京101400)
传感器应用
大型望远镜主镜位置采集系统设计*
栾红民1,2,张 斌1*,李玉霞1,吴庆林1,王 晶1,2,曲云昭1,2
(1.中国科学院长春光学精密机械与物理研究所,长春130033;2.中国科学院大学,北京101400)
对大型望远镜主镜位置进行高精度实时采集是实现主镜位置控制,提高望远镜成像质量的前提。设计了大型望远镜主镜位置采集系统,包括位置采集模块和上位机软件。位置采集模块对位移传感器信号进行调理后使用24 bit的ADC芯片ADS1259实现模数转换,采用DSP处理转换后的数字信号并与上位机通信,同时实现CAN总线组网;上位机软件使用python语言设计,实现主镜位置信息的实时处理和显示。经过测试,该系统的采集误差小于2 μm,能够实现对望远镜主镜位置信号的高精度采集。
大型望远镜;主镜位置采集;模拟信号调理;ADS1259;python
望远镜是进行深空观测与天文研究的最重要的、最基本的工具,其口径越大,集光能力越强,分辨能力越高。为了使镜面因重力引起的面形变化最小,主镜通常采用无定向支撑系统[1]。采用这种支撑技术时,对于小口径望远镜而言,主镜的自重较小,可以认为,安装完成后,主镜相对于镜室的位置不会随着望远镜观测姿态的变化而变化。但是,随着主镜口径的增大,主镜的自重也显著增加,而主镜的支撑结构不可能有无限的刚度,在望远镜观测姿态变化时,或者主镜受到风载、振动等外界因素扰动时,主镜就会相对于镜室产生微量的位移。主镜与镜室的相对位置的变化,会影响望远镜的后继光路的对准,引起离轴、离焦等像差,造成望远镜指向误差[2]。因此,必须对主镜相对于镜室的位置变化进行实时采集与控制,以保证成像质量。
在当今大型望远镜的设计与制造中,主镜位置的采集及控制与主镜的面形控制同等重要,是主动光学系统中不可或缺的组成部分。欧南台的VST望远镜[3]以及 VLT望远镜[4]、美国军方 3.67 m AEOS望远镜[5]以及美国的8 m GEMINI望远镜[6]的主镜支撑系统中都采取在镜室安装位移传感器的方法来测量主镜和镜室相对位置,对主镜位置进行采集与控制。
本文设计了望远镜主镜位置采集系统,包括位置采集模块和上位机软件。位置采集模块以ADC芯片 ADS1259为模数转换电路的核心,以TMS320F28069型DSP作为处理器,实现对望远镜主镜位置信号的高精度采集;上位机软件使用python语言进行设计,主要功能是接收主镜位置原始信息,并进行实时处理与显示。经过实验验证,该系统能够对望远镜主镜位置变化进行准确采集,可以满足实际工作需求。该研究对于大口径望远镜主动光学系统具有重大的意义,为主镜位置控制提供了依据以及技术支撑。关于主镜位置控制的相关问题与技术将在另外的文章中说明与讨论。
1 位置采集模块设计
位置采集模块包括电源电路、调理电路以及数字信号传输电路三部分。电源电路负责产生合适的电压为模拟电路以及数字电路供电;调理电路负责对位移传感器信号进行模拟调理,并输入至ADC芯片完成模数转换;数字信号传输电路负责对数字信号进行处理与存储,与上位机通信,并通过CAN总线组网。
1.1 电源电路设计
通过对电路进行供电需求分析,基于性能以及复杂度的考虑,设计了如图1所示的电源拓扑结构。
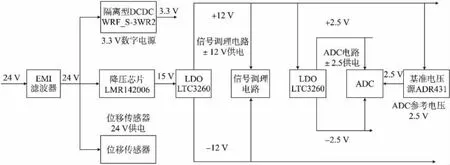
图1 电源拓扑结构示意图
如图1所示,使用FI-B03D型EMI滤波器对外部输入电源进行滤波,防止外部电源中的噪声信号进入电路。使用WRF-S-3WR2型隔离型稳压开关电源生成3.3 V数字电源,将数字电源与模拟电源进行隔离,以避免数字电源中的噪声耦合至模拟电源中。模拟电路的±12 V电源和±2.5 V电源采用低噪声双极性LDO电源芯片LTC3260产生;为了提高电源效率,减小系统功耗,利用LMR14206将+24 V降压到+15 V作为LTC3260的输入电源。ADC芯片的参考电源采用TI公司的ADR431基准电压芯片提供,相对于ADC芯片的片上基准,ADR431具有更小的噪声,更高的精度和稳定性,使测量结果精度更高。为了降低位移传感器输出信号中的噪声,使用滤波后的外部电源为其供电。
1.2 调理电路设计
望远镜位置信号主要有以下特点:位移传感器输出差分信号,幅值范围在±11.25 V之间,属于低频信号,能量主要在几百赫兹以下;干扰特别强,既来自内部,如主镜支撑结构的固有振动,也来自外部,如工频干扰或者信号接地不良等因素引起的干扰[7]。所以,需要设计调理电路对位移传感器信号进行缩放与滤波,以便充分利用高性能ADC,并将信号从噪声中提取出来,最后通过ADC芯片输出位置信息的数字信号。调理电路是位置信号采集模块的核心部分,主要由输入级、滤波级、ADC驱动级以及ADC输出级构成,如图2所示。

图2 调理电路结构示意图
1.2.1 输入级
输入级的噪声系数对调理电路的总噪声系数影响最大,故要求输入级电路必须噪声小、增益稳定、抗干扰能力强[8]。采用低噪声仪表放大器AD8221接收位移传感器输出的差分信号,实现差分至单端的转换,其输入电压噪声密度为电路如图3所示。
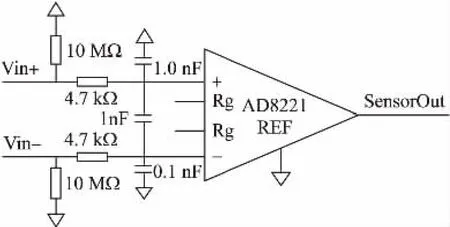
图3 输入级仪表放大电路
AD8221的RG端开路,设置为单位增益,可让该电路具有80 dB以上的共模抑制能力,能够抑制传感器与电路之间的长导线可能会拾取的共模噪声。输入级前端采用阻容式射频滤波器,抑制射频噪声,减小射频噪声对测量结果的干扰;此外,该滤波器还能使差分线与接地之间的交流信号保持平衡,同时也在测量带宽内维持了较高的输入阻抗,避免增加信号源的负载。
1.2.2 滤波级
为了满足ADC的量程以及限制噪声带宽并避免混叠,在第2级中对信号进行缩放和滤波,放大电路与滤波电路均采用低噪声精密运算放大器ADA4004实现,其电压噪声密度为首先将该器件配置为反相放大器,增益为0.2,使位置传感器信号缩放至ADC的输入范围;然后基于巴特沃斯低通滤波器的最平响应的特点,又利用该器件设计了2极点单位增益Sallen-Key滤波器,对信号进行滤波,将其从噪声中提取出来。滤波电路如图4所示。
由图4可得到相关公式如下:
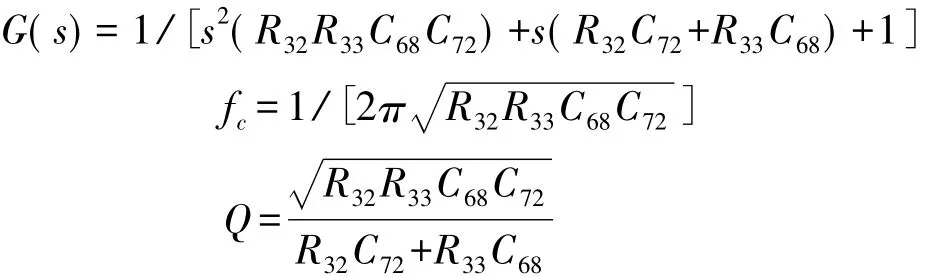
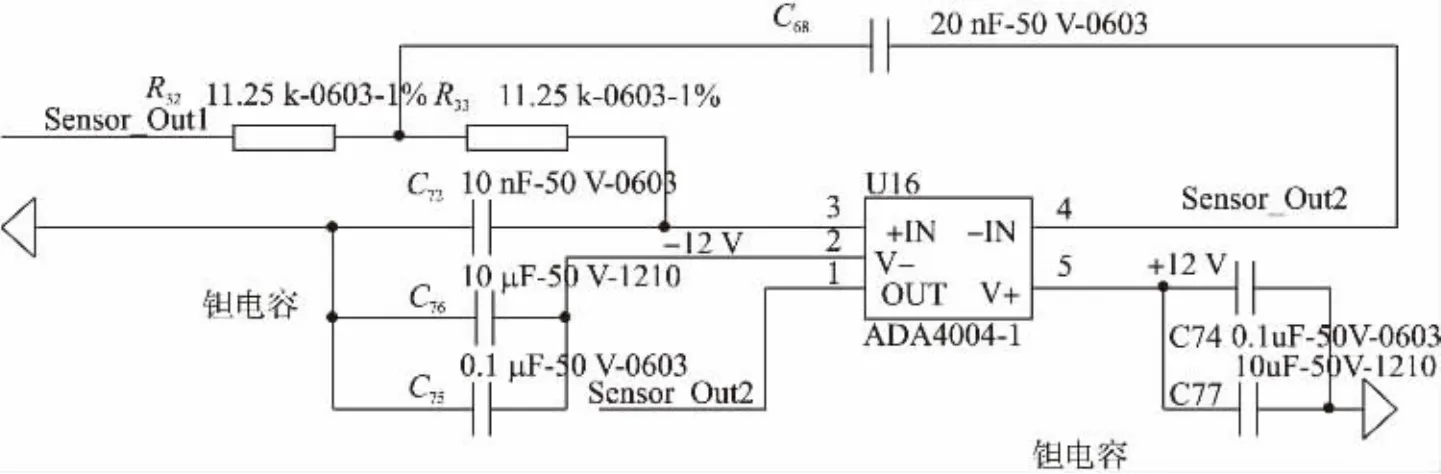
图4 单位增益Sallen-Key滤波器电路
经过计算,可得到该滤波器的截止频率大约为1 kHz,Q值为0.71,其频率响应如图5所示。该滤波器仅允许目标频率通过,从而防止ADC对混叠频率进行采样;同时,设计成单位增益的Sallen-Key滤波器,运算放大器被用作单位增益缓冲器,使其具有高增益精度,提高信号采集质量[9]。
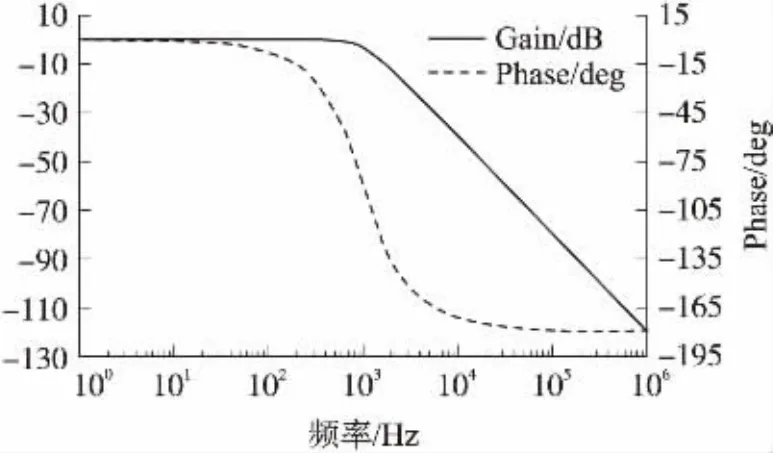
图5 Sallen-Key滤波器频率响应波特图
1.2.3 ADC驱动级
ADC驱动级实现单端至差分的转换,并将结果输入ADC芯片。AD8476是一款单位增益差分ADC驱动器,内置精密激光调整匹配薄膜电阻,具有低增益误差、低增益漂移(最大1×10-6/℃)和高共模抑制(80 dB)的特性。它可执行单端至差分的转换,同时提供VOCM引脚,允许将输出信号转换为对ADC芯片而言的最佳电平。具体电路如图6所示。
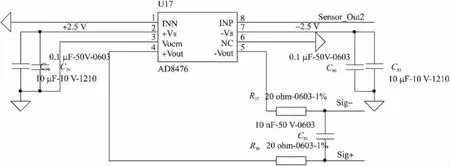
图6 ADC驱动电路
本电路中,输出共模电平设置为0 V,考虑到前一级反相放大器的增益为0.2,当ADC使用2.5 V基准电压时,可获得±12.5 V可用输入范围,确保输入ADC的信号具有最大的动态范围,并满足位置传感器的测量输出幅值范围。其输出信号经过RC共模滤波器滤波后,送至ADC的输入端。
1.2.4 ADC输出级
模数转换使用24 bit,14 KSPS的 ADC芯片ADS1259实现,该器件漂移低,内部集成一个四阶稳定Σ-Δ积分调制器,具有出色的噪声抑制性能和线性特性,电路如图7所示[10]。

图7 ADC电路
ADC采用全差分输入设计,使其具备良好的共模噪声抑制特性,同时也将二次失真改变为共模噪声进行抑制;同时,将输入的差分信号交叉接在ADC的差分输入端,对前一级中的反相放大器对信号造成的反相进行校正。其参考电源采用ADR431基准电压芯片提供,转换后的数字信号通过SPI接口输出。
1.3 数字信号传输电路设计
数字信号传输电路的结构如图8所示。使用TMS320F28069型DSP作为处理器,通过SPI总线和ADS1259通信,对其进行配置以及数据读取;通过RS485总线与上位机通信,将采集到的数据发送给上位机进行位置解算与显示;通过I2C总线与片外存储器通信,对关键配置数据与位置数据进行存储;利用CAN总线实现分布式位置信号采集模块组网[11],各CAN网络节点的ID通过读取拨码开关配置。
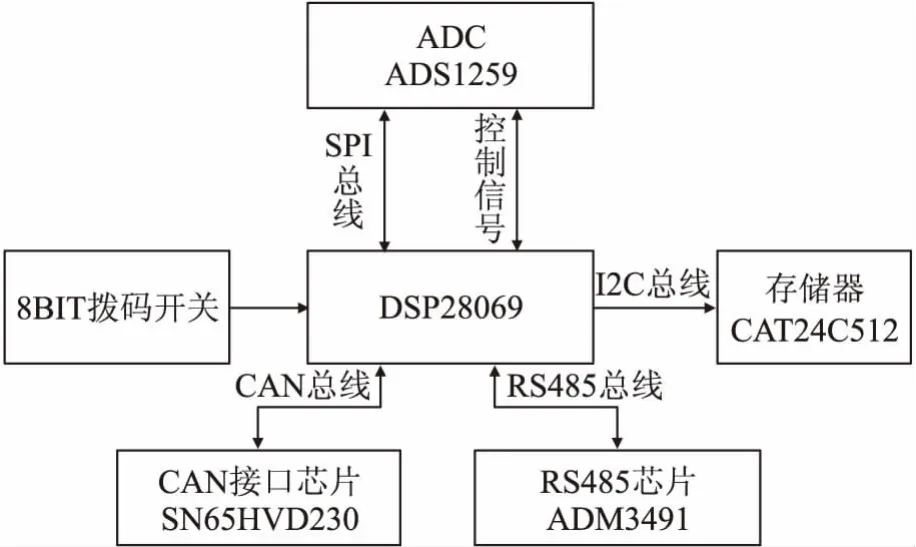
图8 数字信号传输电路结构示意图
1.4 电路布局
电路的性能依赖于合理的PCB布局,包括电源旁路、信号走线以及适当的电源层和接地层等。考虑到所采用的器件多为表面贴装式,电路内接口众多,具有大量互连,所以PCB采用四层板进行布局,分别为信号层、电源层、接地层、信号层。
PCB采用完整的接地层,不仅用作信号电流的低阻抗返回路径,还能将EMI/RFI辐射降至最低,同时,由于接地层的屏蔽作用,电路受外部EMI/RFI的影响也会降低。对模拟地与数字地进行分割,并通过铁氧体磁珠单点互连,防止数字地中的高频开关噪声串入模拟地中,同时也避免模拟地和数字地之间产生意外的直流电压损坏ADC器件[12-13]。去耦电容尽量靠近电源引脚,防止产生额外的走线电感,模拟电源去耦至模拟地,数字电源引脚去耦至数字地。模拟信号布线尽可能短,差分信号遵循等距、等长的原则,以降低电路中信号线间的耦合电容;输入信号线与输出信号线尽可能远离,以避免输出信号通过分布电容与输入电路之间形成反馈,引起电路工作的不稳定。
2 上位机软件设计
上位机软件使用PyQt进行界面开发,使用python语言在Eclipse集成环境中进行功能设计[14],初步实现以下功能:接收位置信号采集模块发送的原始数据,然后解算为实际的位置信息并以实时曲线的形式实时显示出来;将所接收到位置数据存储在excel中,用作后续查证。图9为主镜位置采集系统上位机软件界面。
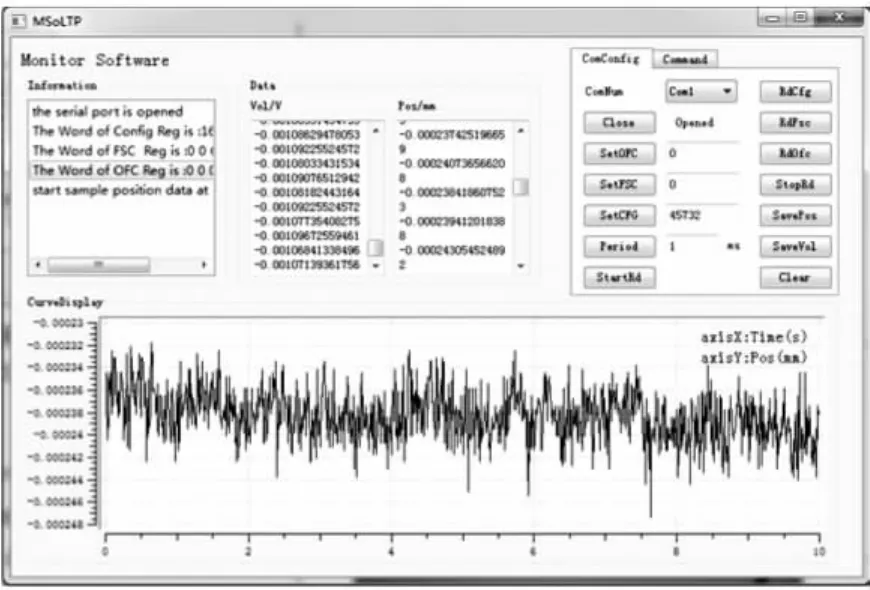
图9 上位机软件界面
上位机软件的相关功能皆使用python各模块中的库函数实现,如xlrd模块(读写excel文件)、guiqwt模块(绘制实时曲线)、pySerial模块(读写RS232接口)等。
3 实验结果
为了检测系统性能进行了实验测试,测试平台由位移传感器(NovoTechnik公司,F205.1g型)、供电电源、位置采集模块以及PC组成,如图10所示。位移传感器有效量程为-2.5 mm~2.5 mm,灵敏度为4.5 V/mm;供电电源为24 V±20%。将位移传感器固定后,使用FLUKE公司的数字精密台式万用表采集其输出电压作为位置采集模块的参考;该万用表型号为8846A,采集精度为0.002 4%。
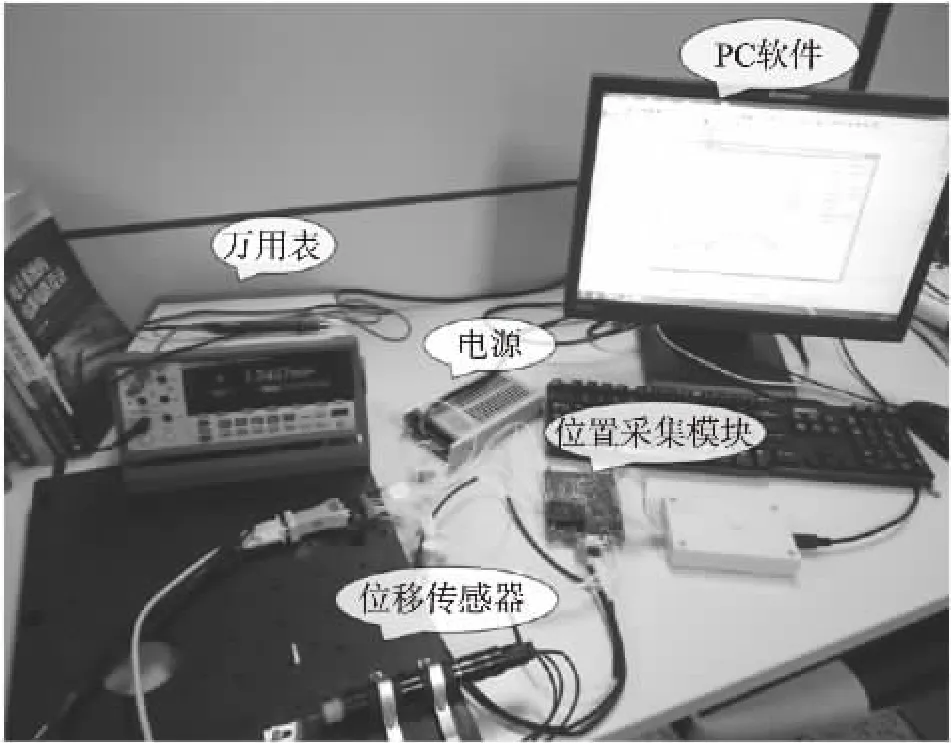
图10 实验平台硬件组成
3.1 测试结果
将位移传感器伸缩至不同的位置,固定好后分别使用本文设计的位置采集模块与万用表进行测量,测量结果如表1所示。

表1 部分位置测量数据
由表1可以看出,采集模块测量值与万用表测量值的偏差小于10 mV,折算成位置误差小于2 μm;图11为传感器输出电压值为0 V、7.733 V与-4.714 V时的测量曲线,采集频率为100 Hz;可以看出,数据波动小于0.2 mV,折算成位置波动小于0.04 μm。表1和图11表明,采集模块的位置测量精度可以满足大型望远镜主镜位置监测需求。
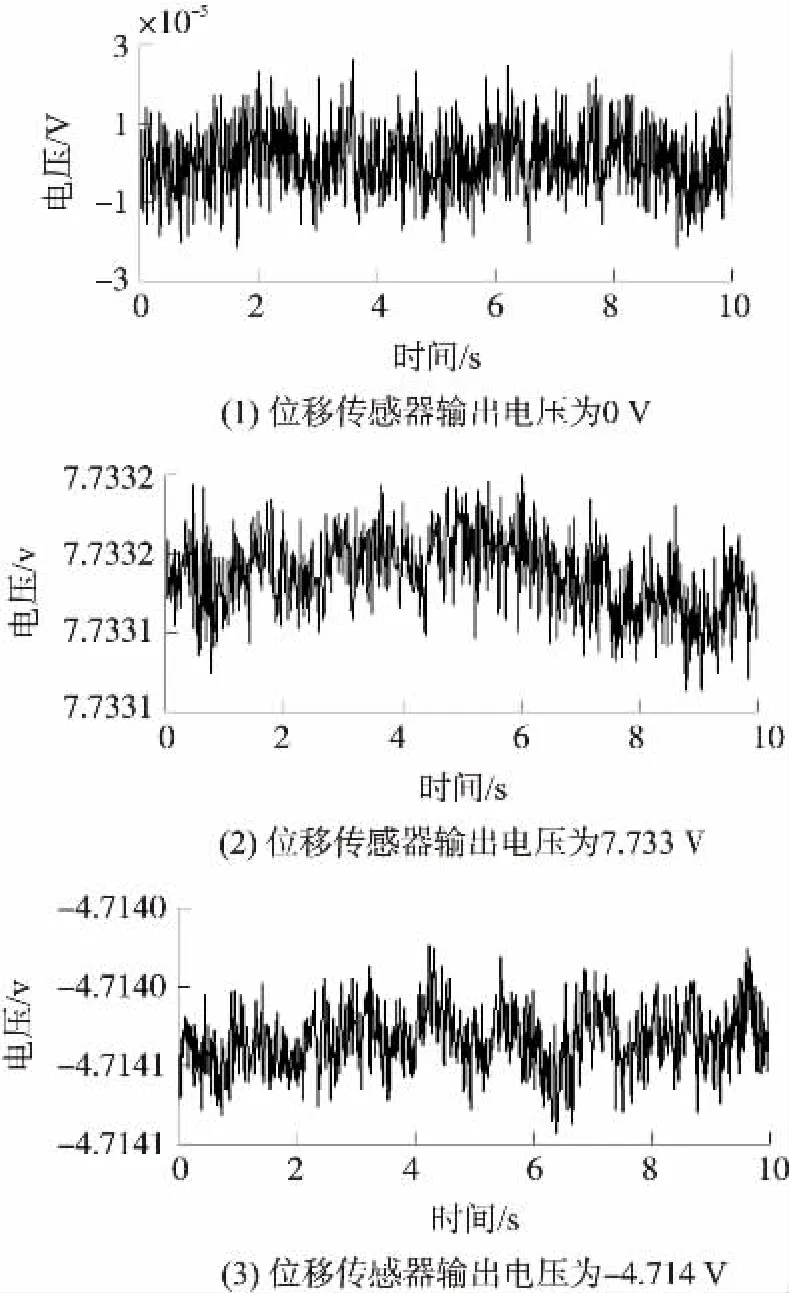
图11 位置采集模块测量曲线
3.2 误差影响因素分析
(1)环境因素
环境因素主要包括两方面:①测试时人员走动等原因造成的测试平台低频率的振动所引起的误差;②温度因素:所使用的位移传感器温度漂移特性为0.45 mV/℃,该因素对长时间测量时的误差影响较为明显。
(2)测量因素
经过分析,造成误差的测量因素如下:位移传感器本身特性,例如灵敏度、线性度、重复性等造成的误差;位置采集模块本身的精度所引起的误差。
4 结束语
针对大型望远镜主镜位置监测的需求,设计了位置采集系统,实现了对主镜位置信号的采集与显示。经过测试,采集位置误差小于2 μm,可以应用于大型望远镜主动光学系统中,作为主镜位置控制的依据。
下一步工作,是将该位置采集系统应用于望远镜主镜支撑结构中,将分布式位置采集模块与上位机控制器通过CAN总线组网,实现主镜轴向与径向共6个自由度的位置信息的监测与控制。
[1] 范磊.2 m级地基望远镜SiC主镜轻量化设计及支撑技术研究[D].长春:中科院长春光学精密机械与物理研究所,2013.
[2] 李玉霞,刘昌华,王建立,等.大型望远镜主镜位姿解算与检测系统设计[J].电子测量与仪器学报,2015,29(5):766-774.
[3] Schipani P,Orsi D S,Ferranina L,et al.Active Op-Tics Primary Mirror Support System for the 2.6 m VST Telescope[J].Applied Optics,2010,49(8):1234-1241.
[4] Hovsepian T,Michelin J L,Stanghellini S.Design and Tests of the VLT M1 Mirror Passive and Active Supporting System[J].SPIE,1998(3352):424-435.
[5] James E Kimbrell,David G.AEOS 3.67 m Telescope Primary Mirror Active Control System[J].SPIE,1998(3352):400-411.
[6] Larry S,Eugene H,Myung C.Gemini Primary Mirror Support System[J].SPIE,1994(2199):223-238.
[7] Scott E.Disturbance Rejection of the WIYN Telescope Position Control Servo System[J].SPIE,(2479):278-288.
[8] 于向前,陈鸿飞,邹鸿,等.极微弱准直流电流信号测量电路的设计[J].仪表技术与传感器,2015(8):62-64.
[9] 林斯波,葛愉成.基于Sallen_Key滤波器的主成形放大电路的研究[J].核电子学与探测技术,2015,35(4):408-416.
[10]秦晓霞,高艳,余辉洋.一种宽量程气压传感器的接口电路设计与测试标定[J].传感技术学报,2015,28(3):320-324.
[11]李平,魏长宝.CAN总线检测系统的多接口设计研究[J].电子器件,2015,38(4):917-921.
[12]汪涛,唐清清,刘江.PSD微位移测量系统的设计与验证[J].传感技术学报,2014,27(4):472-476.
[13]郝晓明,李杰,黄玉岗.基于ADS8568的八路数据采集系统设计[J].传感技术学报,2016,29(1):150-154.
[14]邱霞,段渭军,黄亮,等.基于PyQt无线传感器网络监控软件开发[J].现代电子技术,2014,37(16):65-70.
栾红民(1987-),男,吉林省洮南市人,长春光机所硕士研究生,主要从事电子学设计及精密跟踪控制方向的研究,luanhongmin2016@163.com;
张 斌(1981-),男,导师,吉林省长春市人,副研究员,硕士研究生导师,博士,主要研究方向为光电望远镜伺服控制技术、主动光学控制系统,13844908289@ 163.com。
Design of Primary Mirror Position Acquisition System of Large Telescope*
LUAN Hongmin1,2,ZHANG Bin1*,LI Yuxia1,WU Qinglin1,WANG Jing1,2,QU Yunzhao1,2
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China; 2.University of Science Academy of Sciences,Beijing 101400,China)
High precision primary mirror position real-time acquisition of the large telescope is the premise to realize the primary mirror position control and improve the image quality.The primary mirror position acquisition system of the large telescope is designed,including the position acquisition module and the PC software.The position acquisition module is used to condition analog signal from displacement sensor,convert analog signal to digital signal through 24 bit ADC-ADS1259,process digital signal by DSP,communicate with the PC,and set up the LAN by CAN field-bus.The PC software programed by python is used to realize primary mirror position information real-time processing and displaying.Through testing,it is found that acquisition error is less than 2 μm,and the precision of the primary mirror position acquisition system can satisfy the requirement.
large telescope;primary mirror position acquisition;analog signal conditioning;ADS1259;python
TN710;TN929.52
A
1004-1699(2017)02-0313-06
C:7230
10.3969/j.issn.1004-1699.2017.02.025
项目来源:中国科学院长春光学精密机械与物理研究所重大创新项目专项基金项目(Y3C122E130)
2016-06-29 修改日期:2016-08-10