步进电机加减速控制新方法的研究*
2017-04-12樊留强惠延波
樊留强, 惠延波, 王 莉
(河南工业大学,河南 郑州 450001)
步进电机加减速控制新方法的研究*
樊留强, 惠延波, 王 莉
(河南工业大学,河南 郑州 450001)
通过对步进电机加减速控制方法的深入研究,提出了五段S型曲线的加减速方法,根据设定的位移和时间,计算出S型曲线的参数,根据S型曲线的离散方法,实现PLC控制步进电机完成加减速控制。结果表明:这种加减速算法能够保证速度、加速度的连续,有效抑制失步和过冲现象,避免了机械柔性冲击,延长系统寿命。
步进电机; S曲线; 加减速控制
0 引 言
步进电机的工作原理是根据输入的脉冲信号产生位移运动。步进电机由于具有惯性小、定位精度高、无累计误差、控制简单等特点,成为自动控制系统的重要执行元件之一,广泛应用于工业控制系统[1-3]。随着步进电机驱动水平的提高,细分驱动技术已十分成熟,在步距角减小的同时,输出力矩增大,控制性能显著提高,在速度和负载变化较大时,步进电机能够实现平稳运动。目前,开环和闭环控制是电机控制常用的两种方法。闭环控制适用于精度要求较高的场合,但其系统成本和实现复杂度较高[4];开环控制方法常用且容易实现,适用于精度要求一般的场合。目前主要使用开环控制方式,但要解决失步或超步问题,其研究主要集中在加减速曲线的优化设计上[5]。
本文结合S曲线加减速控制算法,利用PLC内部高速脉冲输出功能直接控制步进电机,使其实现平滑加减速[6]。该算法能够保证速度、加速度的连续,有效抑制失步和过冲现象,避免了机械柔性冲击,延长系统寿命。
1 步进电机加减速模型建立与选择
1.1 步进电机加减速曲线研究
目前,对步进电机的加减速控制方法的研究主要集中在加减速曲线实现上,主要有三种,分别是直线型、指数型和S型,其加减速曲线分别如图1所示[7]。图1(a)中的直线型曲线,其数学计算简单但加速过程开始和结束时速度是突变的,加速度的突变,有可能会出现失步现象,还会给电机带来损害,减少其使用寿命;与之相比,图1(b)中的指数型曲线平滑性好,但加减速的起点和终点加速度仍有突变;S型曲线在加减速阶段的速度曲线形状整体呈现S形,其特点是升速与降速过程的曲线对称。总体来看,性能最好的是S型曲线,该曲线是目前研究的重点,其加减速过程中的加速度和速度平滑性均很好,性能最优,能够实现平稳精确的控制效果。从图1(c)S型曲线来看,该曲线共由七段组成,分别是加加速段、匀加速段、减加速段、匀速段、加减速段、匀减速段和减减速段。在第1、3、5、7段,加速度线性变化;在第2、6段,加速度为恒值;在第4段,加速度为零。S型曲线根据实际情况的应用可以简化为五段、四段。

图1 3种不同的加减速曲线
1.2 步进电机的动态特性研究
步进电机的动态特性运动方程[8]如下:
(1)
式中:J——系统总转动惯量;
θ——转子转角;
β——转子阻尼系数;
k——θ的比例因子;
Tz——所有阻力矩;
Td——电磁转矩。
在步进电机动态运行过程中,其角加速度曲线和矩频特性曲线如图2所示。从图2可以看出,转矩在驱动频率较低时比较大,但当频率上升到一定值后,转矩近似于线性下降。
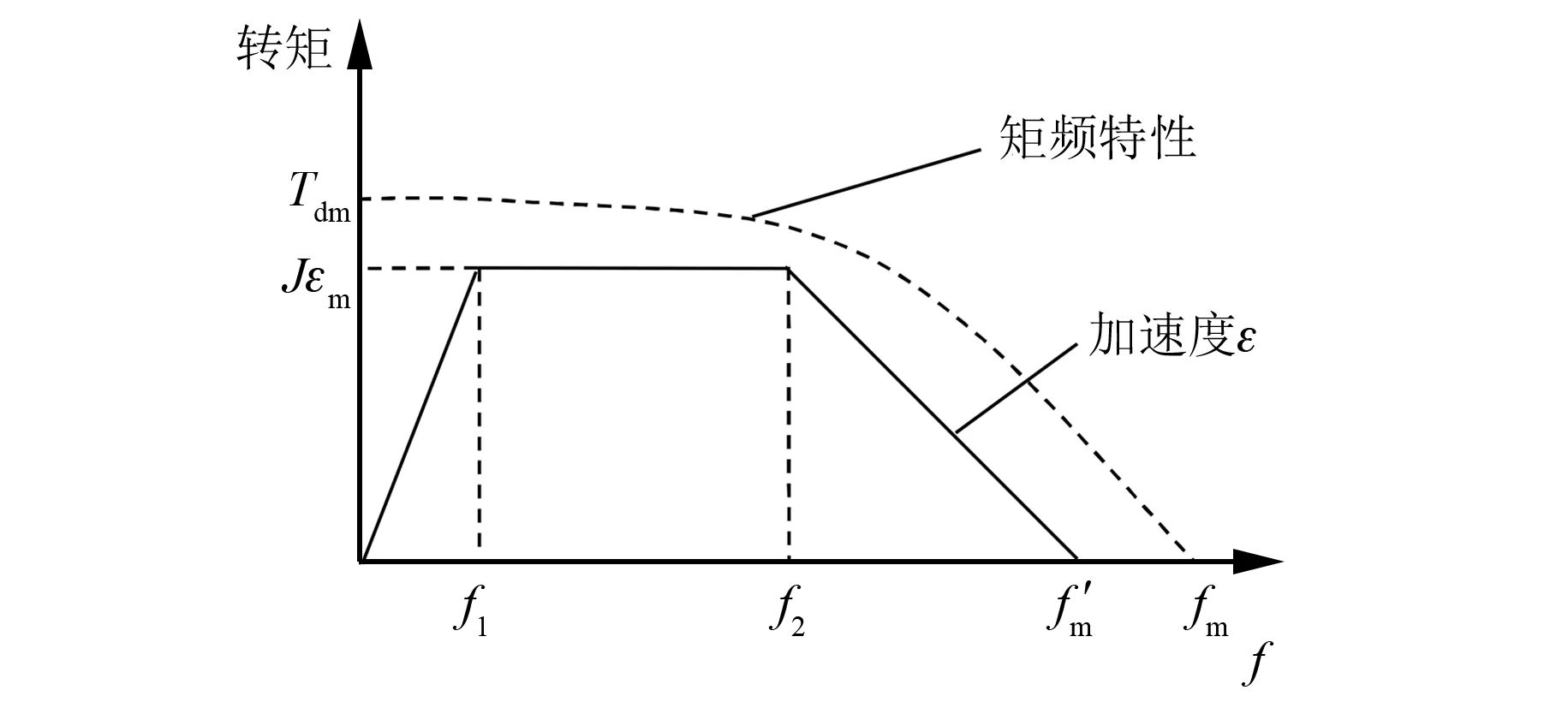
图2 矩频特性曲线和角加速度曲线
由式(1)可知系统的惯性扭矩为
(2)

对于图2中的三段加速度曲线,均为一次方程:
(3)
式中:A、B——待定常数。
假设变速过程中从频率f0变化到f1,对式(3)进行拉氏变换可得
(4)
即:
拉氏反变换并整理后得
改写为
(5)
其中:C=A/B-f0
由式(5)可知,B决定了f随t的变化规律。B<0时对应加速度曲线的第一段,B=0时对应第二段,B>0时为第三段。1/B的值反映了升速的快慢,其值与驱动系统有关。根据步进电机的矩频特性,其升速曲线应如图3所示。
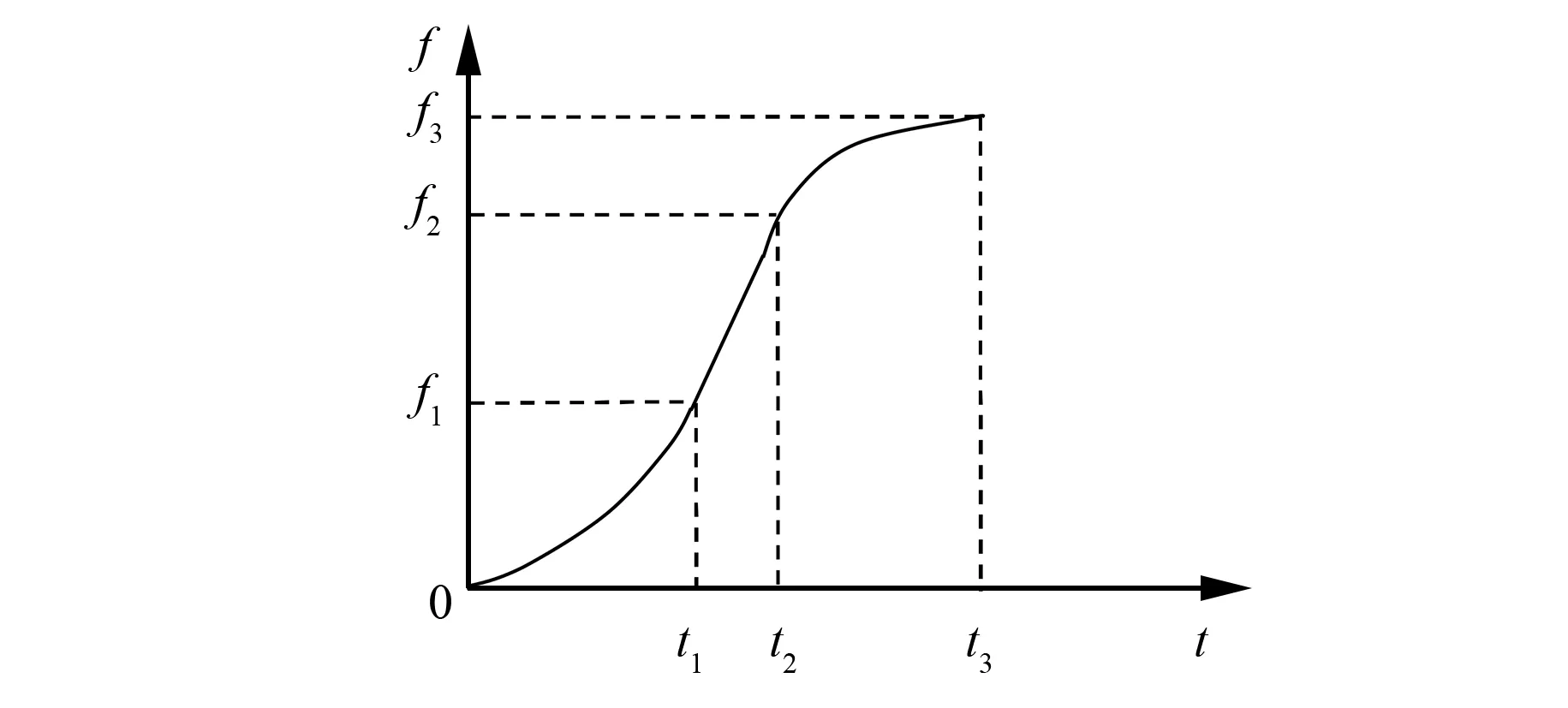
图3 升速运行曲线
2 S型曲线的加减算法
2.1 S型曲线加减速模型
在保证系统柔性的前提下,为简化算法,提出了五段S型加减速曲线[9-10],如图4所示。假设vs=ve,则T1=T2=T4=T5,S型曲线的加减速模型对称。根据文献[7]可得S型曲线的速度函数:
(6)
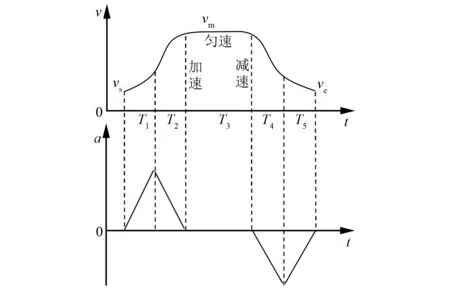
图4 五段S型加减速曲线
式中:a——设定的系统加速度;
vm——步进电机运行的最大速度;
vs——步进电机的起始速度;
ve——步进电机的终止速度;
T1~T5——各阶段的运行终止时间。
假设给定加速度为a,对应加速度曲线的最大值,加速段和减速段的加速度相等均为a,sa、sd分别为加速段和减速段的位移,则:
(7)
根据式(6),当t=T1时,有:
(8)
设加速段运行总时间为T,则
(9)
将式(9)代入式(8)化简得
(10)
联立式(7)、式(10)可得
(11)
由式(6)和式(11)可知,若给出vs、s和T,就可以求出加速段S型曲线的所有参数。其中vs可以由步进电机的参数特性和步进电机驱动器的细分数给出。减速段过程与加速过程类似。
2.2 S型曲线的离散化方法
2.2.1 脉冲序列逼近
为了得到如图3所示的驱动脉冲序列,需对式(5)进行离散化处理[11]。设t时刻,步进电机控制器发出第N个脉冲:
所以:
(12)
由式(12),用牛顿迭代法求出第N个脉冲的时刻,即
(13)
将式(13)迭代若干次,可求出t(N),再将其代入式(5)求出每个N对应的f(N),然后根据f(N)求倒数就可以求出T(N)。采用这种方法时,定时器的存储值需要不断更新,用脉冲序列来逼近图3所示的曲线。由于迭代需要占用CPU运算的时间,一般需要事先计算出与T(N)对应的定时器存储值,提前将建立好的数据表存储起来。采用查表方式查出定时器所需的存储值,以提高系统响应速度。
2.2.2 定时脉冲串输出
离散方法如图5所示。整个加速时间等分为若干时间段,设每个时间段的长度为t′,一般取t′=2/fs,其中fs为电机的起动频率。将t=nt′时刻的曲线值作为每个频段的频率值,但由于相邻时间段的频率变化较小,可以把整个时间段分为7段、9段等较少的段,使相邻段频率变化较大。可以通过定时器产生一段周期不变的脉冲串,使周期值与脉冲数的乘积正好等于定时时间间隔;然后产生下一个脉冲串,在设定的时间之内产生离散后的S型曲线的所有脉冲。
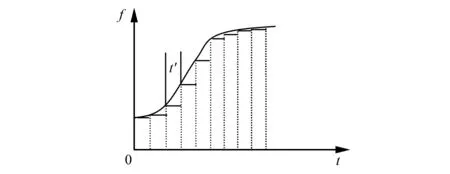
图5 离散的脉冲频率曲线
3 PLC实现S型曲线加速
由式(11)可知根据设定的s和T值可以计算出vm和a,从而可以得到速度曲线表达式;然后采用定时脉冲串方式进行离散化处理,得到步进电机从起动速度vs加速到正常工作速度vm的离散化脉冲频率曲线。计算出各步脉冲定时和时间间隔,利用PLC的PT0脉冲输出的方式,定时间隔产生多个连续的单段脉冲序列可以很好地拟合S型加减速曲线。
为了检验这种算法能否保证速度的连续性,设定加速段位移s=1 000个脉冲,加速时间为t=0.4 s,vs=2 000 Hz,由式(11)得
(14)
(15)
根据式(6)得到速度脉冲曲线:
(16)
根据S型曲线离散化方法,计算S型曲线加速过程中所需脉冲序列,包括脉冲频率和个数,结果如表1所示。

表1 步进脉冲时间间隔
4 结 语
通过对步进电机加减速算法的深入研究,提出一种根据设定的位移和加速时间实现S型曲线的加速控制算法;利用S型曲线的离散方法,实现PLC控制步进电机完成S型曲线的加速过程。利用S型升降速曲线可以抑制步进电机的失步和过冲现象,减小系统的柔性冲击。
[1] 花同.步进电机控制系统设计[J].电子设计工程,2011,19(15): 13-15.
[2] 江华生,李鸣,高素萍,等.基于PLC的步进电机控制技术[J].自动化技术与应用,2006,25(10): 54-56.
[3] 林晓新,吴小洪,曹占伦,等.S曲线加减速控制在LED粘片机中的应用[J].机械制造,2008,46(5): 21-23.
[4] 翟雁,郭阳宽,祝连庆,等.步进电机模糊PID闭环控制系统仿真研究[J].现代电子技术,2015,38(11): 146-149.
[5] 周黎,杨世洪,高晓东.步进电机控制系统建模及运行曲线仿真[J].电机与控制学报,2011,15(1): 20-25.
[6] 李亚,杨亮,任鹏,等.步进电机短位移高响应加减速控制方法研究[J].组合机床与自动化加工技术,2010(8): 30-32.
[7] 王勇,王伟,杨文涛.步进电机升降速曲线控制系统设计及其应用[J].控制工程,2008,15(5): 576-579.
[8] 陈爱国,黄文玲,杨红红.步进电机升降速曲线的研究[J].机电产品开发与创新,2003(2): 47-49.
[9] 张碧陶,高伟强,沈列,等.S曲线加减速控制新算法的研究[J].机床与液压,2009,37(10): 27-29.
[10] 李晓辉,邬义杰,冷洪滨.S曲线加减速控制新方法的研究[J].组合机床与自动化加工技术,2007(10): 50-53.
[11] 徐煜明.步进电机速度控制的研究与实现[J].工矿自动化,2007(2): 82-84.
Research of Step Motor on Acceleration and Deceleration Control Method*
FANLiuqiang,HUIYanbo,WANGLi
(Henan University of Technology, Zhengzhou 450001, China)
Based on further study of step motor on acceleration and deceleration control method, a new five phased S-curve acceleration and deceleration method was proposed.The parameters of S-curve could be calculated according to a set of displacement and time, then the PLC could complete the acceleration and deceleration control of step motor based on the discrete method of S-curve.The results showed that the method could make sure the speed and acceleration was continuous, also restrained phenomenon of out-of-step and overshoot, avoiding the mechanical flexible impact and extending the life of the system.
step motor; S-curve; acceleration and deceleration control
河南省科技厅自然科学项目(152102210270);河南省教育厅科学技术研究重点项目(14B460026)
樊留强(1990—),男,硕士研究生,研究方向为制造业信息化。 惠延波(1964—),男,教授,研究方向为制造业信息化、粮油食品检测技术与装置。
TM 301.2
A
1673-6540(2017)03- 0036- 04
2016 -07 -11
