自主移动智能金属探测器研制*
2017-04-12许江淳余丽玲黄生旺
许江淳, 余丽玲, 黄生旺
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
自主移动智能金属探测器研制*
许江淳, 余丽玲, 黄生旺
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
为提升民用金属探测器探测精度和智能化程度,设计并制作了一种可自主移动探测的金属探测器。可自主移动的小车承载AY—LDC1000传感器探头,利用金属的涡流效应,采用STM32作为微处理器,检测探测频率的变化,并控制探测器自主移动,能在指定范围内自动、准确地探测出金属位置。通过实验检测该系统的可行性和稳定性,结果表明:探测器能精确自动探测出金属目标,且具有较高的探测率。
自主移动; 金属探测器; AY—LDC1000; 涡流效应; STM32
0 引 言
金属探测器[1~3]设计技术经历了从最初的模拟电路检测处理技术到现如今的数字电路检测处理技术的演变,其分辨率、智能化以及灵敏度都有很大程度的提高。传统金属探测器探头在原理设计上一般利用正弦波振荡电路,该种电路设计较为复杂,探测灵敏度低且抗干扰能力差,环境及元件的改变都会导致波形失真。为了提高检测精度、灵敏度及稳定度,本设计以STM32为控制芯片,通过LDC1000数字传感器来探测导电或导磁金属的精确位置,利用LDC1000在金属探测上的特性,处理器通过探测反馈信号调整探测小车自身速度和位置,从而实现了快速、准确的金属物体定位。
1 金属探测的原理
金属物体探测的最基本原理是物理中的电磁感应原理,金属探测器原理图如图1所示,原始探测线圈的电感
L1、电阻R1、电压有效值E、电流有效值I1、角频率ω,被探测金属的等效涡流电感L2、电阻R2、涡流有效值I2,激励线圈与被探测金属的互感M之间的对应关系见式(1)和式(2)
I1R1+jL1ωI1=E+jMωI2
(1)
jMωI1=I2R2+jL2ωI2
(2)

图1 金属探测器原理图
根据式 (1)、式(2)得
(3)
由式(3)可知,当线圈靠近金属物体时,由于涡流效应导致线圈的等效电感、等效电阻发生改变,从而可以通过检测线圈的电压变化达到金属检测的目的[4]。
但是,上述方法在探测时等效电感与等效电阻的变化同时发生,当两变量耦合时,可能使探测线圈的电压为0,从而导致检测出错。由于在稳定的工作状态下,金属探测器探测线圈中的振荡频率几乎是一个定值,当检测有金属物体时频率改变。为提升探测精度,提出并采用了一种利用频率变化原理来进行金属探测的方法。频率变化公式
Δf=-kf30ΔL
(4)
式中 k与c相关,f0为初始稳定电路中的频率,ΔL为线圈电感变化量[5]。
电磁感应在金属中会产生涡流损耗和磁滞损耗。功率损耗P,涡流损耗因子Wx,磁场交变频率f,磁感应强度的幅值B[4]之间的对应关系
P=Wxf2B2
(5)
从式(4)中可看出频率的变化受线圈等效电感变化的影响,从式(5)中可看出频率还与损耗功率有关。以下分析不同情况下频率的变化规律:
1)导电导磁的金属:导电性及导磁性都较好,由于涡流电流比较大,产生的磁场极大地削弱了原磁场,使电感略有降低,导致频率只有小幅度的上升。
2)导电不导磁的金属:导电性好但不导磁,致使在探测过程中涡流损耗大,但磁滞损耗小,使电感有小幅度的增加,导致频率会有一定幅度的下降。
3)导磁不导电金属:导磁性好但不导电,致使其涡流损耗小,而磁滞损耗很大,电感降低幅度比较大,导致频率有明显的上升幅度。
4)不导电不导磁的非金属物料:导电性和导磁性都不好,电感及频率几乎没有变化[4]。
2 系统硬件设计
本设计使用LDC1000作为探测器探头,系统微控制器选用STM32。当探头通过金属物体上方时,探头内部工作频率会发生变化,从而能方便地实现金属探测。系统整体结构简图如图2所示。LCD1000电感传感器将检测到的信号传给STM32,STM32对检测到的数据进行分析处理后通过调节占空比从而改变舵机的方向和速度。当检测到金属,电机停止转动此时蜂鸣器响且发光二极管发光显示屏显示检测到物体。
2.1 主控电路模块
根据功能需求,本设计采用微处理器选用ST公司的型号为STM32F103芯片,其内核工作频率可高达72 MHz,片内RAM为256 kB,系统对数据存储和对数据的运算处理有较大裕量,其丰富外设接口,如UART,I2C,SPI等,以及丰富的固件库资源。硬件上系统的电路体积会更小,性能更高,软件上编程更简单。
2.2 电源模块
电源模块采用LM2596开关电压调节器,为降压型电源管理单片集成电路,具有自我保护电路和很好的负载调节特性。由于该器件可以使用通用的标准电感,简化了开关电源电路的设计,是理想的电源模块使用芯片。固定输出版本有3.3,5,12 V,可调版本可以输出小于37 V的各种电压。此处使用LM2596将7.2 V电压降为5 V电压给舵机供电。
2.3 电机驱动模块
本模块选用的是可自由旋转的舵机,它由直流电机、传感器和控制电路组成自动控制系统[6]。可以根据需要给控制电路传送信号得到想要的旋转角度。舵机有自己的最大旋转角度,此处选择最多可旋转180°的舵机。此处用舵机同时控制小车转动和前进的速度。舵机的转角及速度是由STM32单片机产生脉宽调制(PWM)波控制的,小车的两个轮子分别由两个同型号的电机控制,最优占空比的变换是通过多次试验得出来的。通过程序中的算法和多次测试,选出最佳的数据,小车移动精度为0.1 mm,旋转角精度可达0.5°,高精度运动控制可使主控模块更好地控制小车,使其更快更准地接近金属物体。
2.4 传感器检测模块
LDC1000是世界上首款电感/数字转换器,能够直接输出数字量,在恶劣环境中,具有非常高的可靠性。提供SPI接口可以方便连接MCU,只需外接一个线圈就可以实现非接触式电感检测。当通有交流信号的传感器线圈靠近金属物体时,线圈中的信号发生改变,根据信号的变化来检测金属[7]。LDC不仅可以测出不同属性的金属物体而且还可以检测金属与传感器线圈的距离,可以方便小车自动搜索到金属物体。LDC数据读写时序如图3。
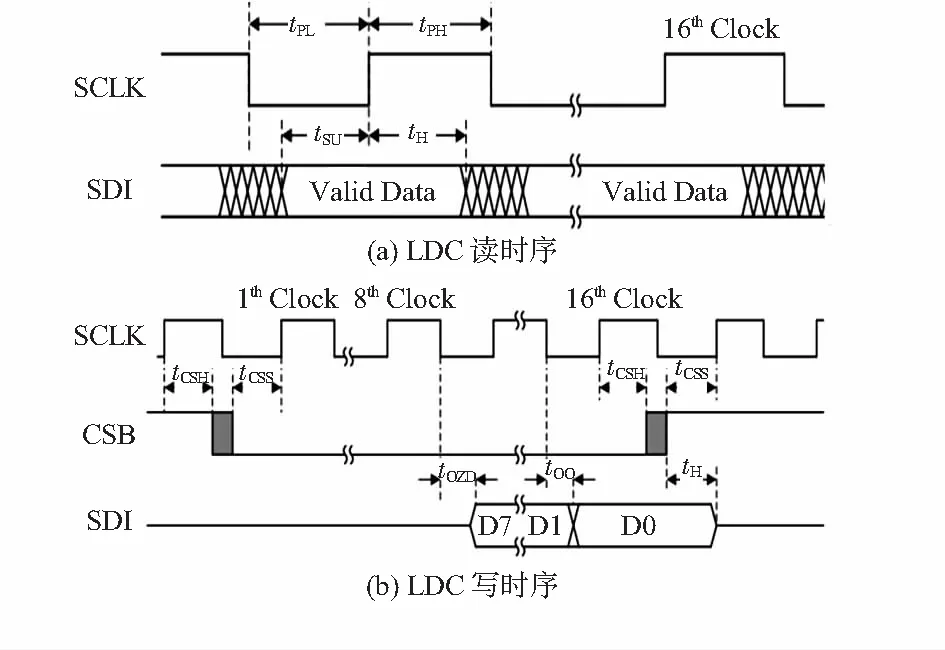
图3 LDC读/写时序
2.5 声光显示模块
利用LDC1000可以检测金属与检测线圈距离的特性,小车自动寻找金属物体。未处理其根据LDC1000探测信号反馈信息逐渐调整舵机的转角和速度。当探头停止在金属物体的正上方时,小车停止运动,启动声光报警提示,显示屏上显示找到金属。
3 系统软件设计
先初始化程序,根据LDC1000 数据手册及实际测试可知,如果响应时间在2 592~12 000 μs的范围内,说明LDC1000初始化成功,STM32将读取LDC1000的数据并继续判断频率的变化情况,否则程序将返回初始状态重新开始;如果频率没有变化STM32将重新读取LDC的数据;如果金属探测器在探测目标正上方时频率有小范围下降,则可判定为导电的金属;如果有小范围上升,则可判断为导电导磁的金属;如果频率上升较大,则判断为导磁的金属。系统主流程图如图4所示。
依据LDC1000 使用手册及试验可知传感器测量距离的原理就是距离d与Rp值成比例,通过Rp可以推算出金属的距离,线圈中的等效电阻Rp与谐振频率f的计算
R=(Rmax×Rmin)/[Rmin×(1-Y)+Rmax×Y]
(6)
Y=Pdata/215
(7)
F=(1/3) ×(Fext/Fcount)×t
(8)
式中Pdata为LDC输出的数据与距离d有关,其寄存器的地址为0x21和0x22,Rmax和Rmin为线圈周围无金属时和线圈距离金属最近时实际测量中线圈的等效电阻值(事先写入寄存器中)。Fext是外部基准时钟频率,Fcount是LDC内部计数器值,t为响应时间。将系统初始化时的Rp和f显示在屏上作为参考点,用检测到金属物体的信号值与参考点的信号值相减得到变化值Δf,不同的金属检测得到的Δf也不同,据此即可进行相应的判断。依次按照设定对LCD1000的寄存器写入对应的控制字,利用spi_readBytes函数可以一次性将所有寄存器内的值全部读出。
数据在程序中的处理:
spi_readBytes(LDC1000_CMD_REVID,&orgVal[0],12);
writerByte(LDC1000_CMD_RpMAX,RpMAX);
writerByte(LDC1000_CMD_RpMIN,RpMIN);
writerByte(LDC1000_CMD_SENSORFREQ,0x94);
writerByte(LDC1000_CMD_LDCCONFIG,0x17);
writerByte(LDC1000_CMD_CLKCONFIG,0x02);
writerByte(LDC1000_CMD_INTCONFIG,0x02);
writerByte(LDC1000_CMD_THRESHILSB,0x50);
writerByte(LDC1000_CMD_THRESHIMSB,0x14)。
4 测试方案与测试数据
4.1 测试方案
为了验证本文设计的硬件电路和软件系统的有效性和可靠性,以1 m2无机玻璃板作为检测区域[8],将待测物置于玻璃板下方,如图5(a)所示。小车进入探测区后,让小车缓慢前进,探头左右扫描金属物体,由于探头扫描的圆半径为10 mm,所以,当探头检测到边缘的金属丝时让小车后退5 mm后旋转大约90°,让小车前进5 mm后让其再转90°往回继续扫描,当快扫描到金属物体时减慢小车的前进速度并做微小的调整让探头准确接近金属物体[9]。多次测量发现线圈中的振荡频率在没有金属物体时稳定在1.5 MHz。金属物体探测器的实物图如图5(b)。
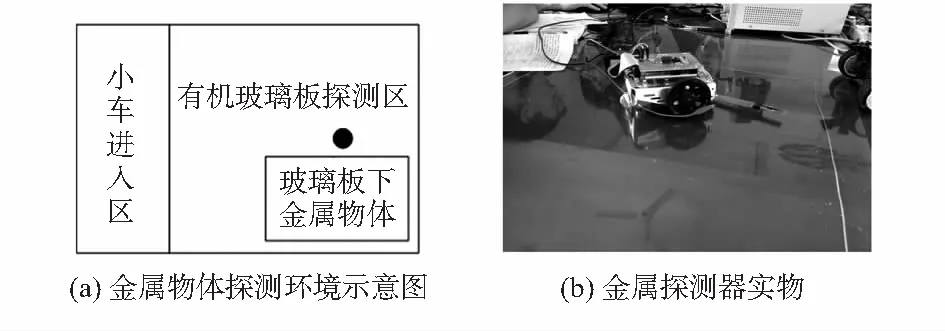
图5 金属探测器环境示意图和实物图
4.2 探测频率测试
为验证导电金属、导磁金属、既导电又导磁金属的频率变化特性,对探测频率进行如下测试:将探测小车置于1 m2有机玻璃板上,测出探头未检测金属时模块输出的初始频率值,然后再分别测出探测器在探测一元硬币大小的木块(既不导电也不导磁)、一角硬币(铝制不导磁)、一元硬币(导电导磁)、一元硬币大小的磁性物体时模块输出的频率值,将检测到不同物体时的频率值与初始值相减得到相对频率值Δf,除木块Δf为0外,其他物体探测得到的Δf会随着探测距离的变化而变化。以步进距离为0.5 mm对相对频率Δf进行采样,不同材质金属的频率变化Δf变化情况如图6所示。
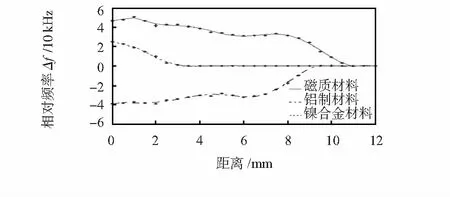
图6 不同材质金属的频率变化
4.3 测试结果
本设计以LDC1000线圈附近无金属物时的频率1.5 MHz为基准频率,当线圈在导电导磁(镍合金)物体正上方时,频率上升22 kHz左右。当线圈在磁性物体正上方时,频率上升45 kHz左右;当线圈在导电不导磁物体(铜块)正上方时,频率下降40 kHz左右。将测得的频率与设定的频率变化范围进行对比,在一定的误差范围内,如果检测频率在此范围内,则认为检测到了对应的金属物体。通过可自主移动小车寻找金属物体时线圈频率变化的规律,可寻找到不同材质的金属并给出定位指示。
对不同材质的目标物体进行探测实验,每种实验80次,并分别统计检测时间和探测识别次数,测试结果如表1。
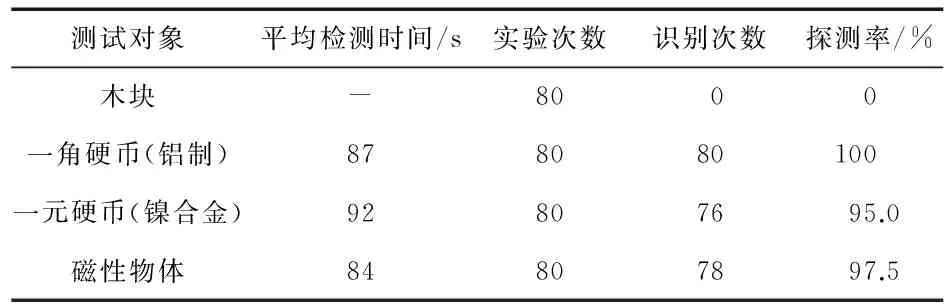
表1 测试结果
对木块的识别率为0;对铝质目标识别率为100 %,平均耗时87 s;对镍合金材质目标探测识别率为95 %,平均耗时92 s;对磁性材质探测识别率为97.5 %,平均耗时84 s。
5 结 论
实验表明:研究设计的可移动自主式金属探测器具有较强的自主探测能力,探测精度高、识别效果好、系统稳定性高。后期可在此次研制基础上进行放大制作和改进,以便应用于实际生产生活中。
[1] 周灵彬,疏晓宇.金属物体探测定位器设计[J].工业仪表与自动化装置,2016(1):111-114.
[2] Xu Fengqiu,Xu Xianze,Li Zhongbing,et al.A differential probe design for large-range metal detector[J].Sensor Review,2014,341:67-74.
[3] 殷建国.单片机金属检测器系统研究[J].现代电子技术,2010(4):183-186.
[4] 彭建学,叶银忠,侍 尉,等.基于跨导测量的金属探测方法[J].电测与仪表,2013(4):82-85.
[5] 刘慧娟,李志刚.一种基于电压和频率的金属探测方法[J].仪器仪表学报,2006(7):769-772.
[6] 花加丽,李开霞,叶晓东,等.高灵敏度金属分离器传感线圈的设计[J].自动化与仪器仪表,2011(6):50-51.
[7] Zhang Q B,Zhao J.A review of dynamic experimental techniques and mechanical behaviour of rock materials[J].Rock Mechanics and Rock Engineering,2014(47):1411-1478.
[8] 陈 庚,李 擎,时佳斌,等.未知环境中机器人可行区域的认知研究[J].传感器与微系统,2015,34(1):66-68.
Research and fabrication of autonomous mobile intelligent metal detector*
XU Jiang-chun, YU Li-ling, HUANG Sheng-wang
(Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China )
In order to improve detection precising and intelligentia- lize degree a metal detector which can be used for autonomous mobile detection is designed and fabricated.Using metal eddy current effect detect change of frequency use STM32,as microprocessor AY—LDC1000 sensor probe carried by autonomous mobile car can automatically and accurately detect metal position.Feasibility and stability of the system are tested by experiments.The experimental results show that the detector can detect metal target accurately and automatically, and has high detection rate.
autonomous mobile; metal detector; AY—LDC1000; eddy current effect; STM32
10.13873/J.1000—9787(2017)04—0107—04
2016—04—22
云南省科技厅项目(2009GJF30050);国家质检总局科技计划项目(2013QK104)
TP 311
A
1000—9787(2017)04—0107—04
许江淳(1962-),男,副教授,硕士生导师,从事嵌入式系统技术及应用、SOC及FPGA系统技术应用等研究工作。
