一种基于多相机的多介质三维重建算法研究
2017-04-08何露茜何斌
数字技术与应用 2017年2期
关键词:三维重建
何露茜++何斌

摘要:随着计算机技术的快速发展,基于图像的水下三维重建逐渐成为计算机图形学和计算机视觉领域的研究热点之一。但是大部分水下三维重建都是将相机沉入水中完成,本文提出了一种基于多相机的多介质三维重建算法,将相机置于空气中来实现水下运动捕捉。
关键词:三维重建;多介质;运动捕捉
中图分类号:TP391.4 文献标识码:A 文章编号:1007-9416(2017)02-0160-02
2.2 多介质三维重建
因为折射率的印象,中心透视模型不再满足,均匀介质下的三维重建模型也不再适用。
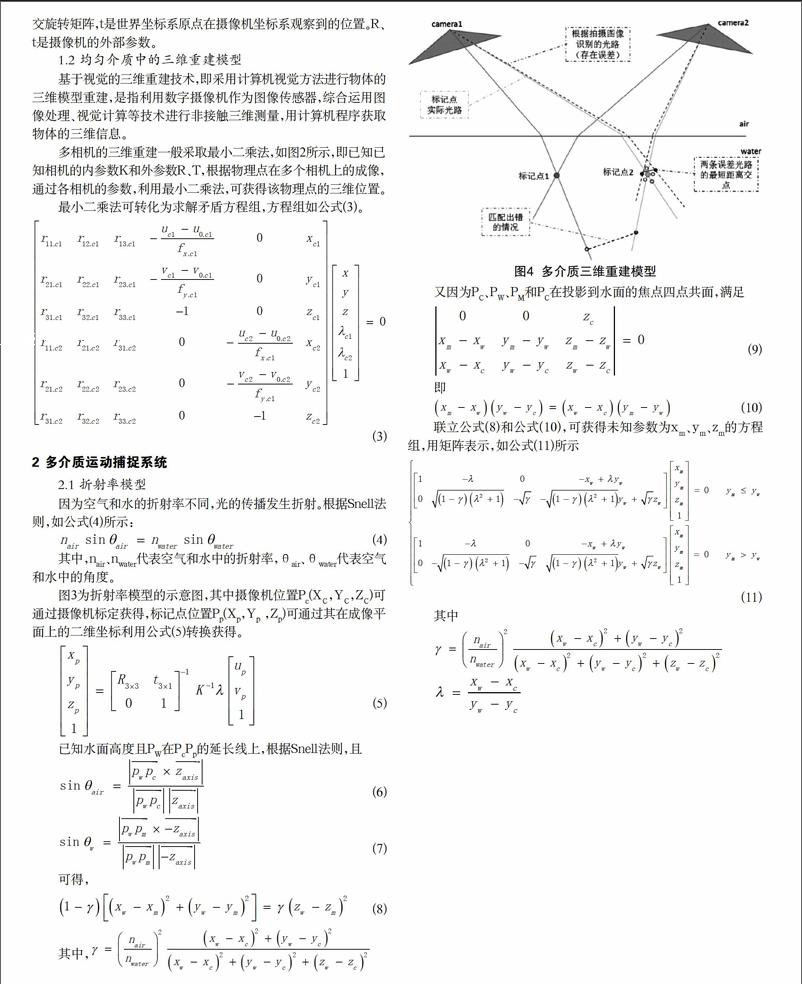
本文提出了一种多介质的三维重建方法,如图4所示。
多介质三维重建的过程如下:
(1)光路转换。在已知相机位姿和标记点在图像坐标系的位置,获得标记点光路与水面的焦点,根据折射定律,计算获得标记点光路在水下的传播路径。
(2)标记点匹配。相邻摄像机的标记点两两匹配,计算其光路的最短距离及其交点。根据实验鱼类的游动速度小于为1m/s,拍摄的帧速率为120fps,可以推得标记点的移动范围小于1cm,由此滤去出错点。
(3)三维重建。对于第一帧,采用K-means算法對所有候选点进
