基于机器视觉的车辆行人检测系统技术综述
2017-04-08黄志杰杨广柱
黄志杰++杨广柱
摘要:随着城市化进程的逐渐加快,城市道路交通环境的发展情况越来越复杂,人民群众日常出行的安全性很难得到保障。为了改善这种状况,车辆行人检测系统的应用受到了产业界的高度重视,能够及时的检测到运行中的行人,第一时间作出危险预测,从而有效的避免安全事故的发生。机器视觉是一种常见的行人检测传感器,本文将基于机器视觉的车辆行人检测系统中的关键技术进行分析,并且针对分析结果对行人检测系统技术未来的发展情况进行展望。
关键词:机器视觉;车辆行人检测系统;关键技术
中图分类号:TP391.4 文献标识码:A 文章编号:1007-9416(2017)02-0115-02
行人检测系统是确保车辆能够安全运行的前提条件,在保持安全车距、防止发生碰撞事故等方面都有着积极的意义。通过行人检测系统的使用,车辆能够自主的对周围环境进行实时检测,并且根据检测结果进行准确的分析,给驾驶员提供更加准确的意见,有助于驾驶员在第一时间对周围环境中的安全隐患做出反应,对行人进行有效的保护,为人民群众的日常出行提供了基本保障。
1 基于机器视觉的车辆行人检测系统技术流程
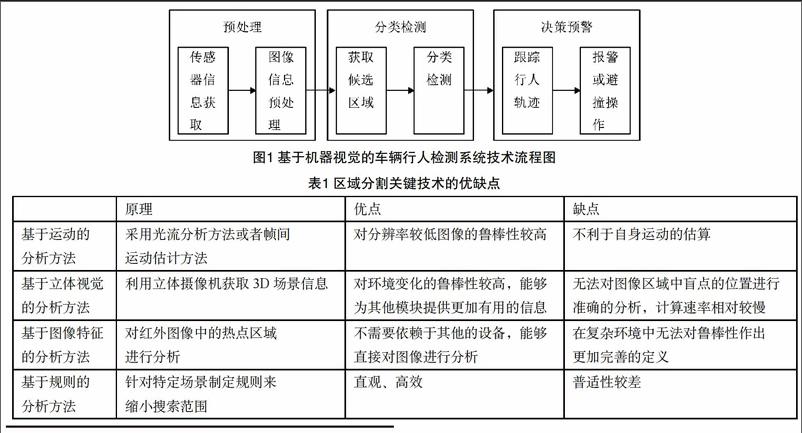
基于机器视觉的车辆行人检测系统在设计的过程中,主要涉及到三个流程,分别是预处理阶段、分类检测阶段和决策报警阶段。预处理阶段能够通过机器视觉传感器获取到准确的车辆前方图像信息,并且自主的对这些图像信息进行预处理,像是降噪、增强等步骤,这样就能够获得更加清晰的图像,有助于驾驶员对车辆前方的情况作出更加明智的判断。分类检测阶段主要利用图像分割、模型提取等先进的图像处理技术对图像中的信息进行区域分割,也就是行人的候选区域,然后利用ROIS手段对行人的候选区域作出进一步的判断,从而更加准确的判断出每个区域内是否存在行人,对行动中的行人作出更加准确的检测。决策报警阶段是指对运动中的行人进行跟踪,利用先进的科学技术对行人的运行轨迹进行预测,从而制定出更加准确规避计划,对于提高行人检测系统的精准度有很大的帮助。另外,当行人检测系统经过分析之后发现可能会出现运动中的行人与车辆相互碰撞的情况,决策报警系统也会在第一时间发出警告,提醒驾驶员不要作出导致碰撞的操作[1]。图1为基于机器视觉的车辆行人检测系统技术流程图。
2 基于机器视觉的车辆行人检测系统的关键技术
2.1 区域分割
区域分割是基于机器视觉的车辆行人检测系统的关键技术之一,对于这种关键技术的分析可以从运动、立体视觉、图像特征、规则四个角度进行,表1为基于这四种因素分析方法的优点和缺点。
2.1.1 基于运动的车辆行人检测系统
基于机器视觉的车辆行人检测系统区域分割与基于监控场景来构造背景模型进行分割的方法有很大的差异,车辆行人检测系统中的摄像机始终处于运动的状态,在分析的过程中会采用光流分析方法或者帧间运动估计方法。基于运动的车辆行人检测系统主要通过对地面位置的估计和人体身高的区间范围进行分析,即便是分辨率比较低的图像也能够很好的进行检测,提高了检测结果的鲁棒性。但是,这种方式在使用过程中也存在着一定的缺点,就是无法准确的进行自身运动的估算,对于车上辅助设备的依赖比较严重。
2.1.2 基于立体视觉表1 区域分割关键技术的优缺点的车辆行人检测系统
随着科学技术的不断完善,立体视觉技术在各个领域中的应用越来越广泛,基于立体视觉的车辆行人检测系统也受到产业界的高度重视。在基于立体视觉技术的方法中,应用最广泛的就是利用立体摄像机获取3D场景信息,通过对3D场景信息的分析来估计地面位置,结合人体身高区域范围进行更加准确的分割。基于立体视觉的车辆行人检测系统的优势在于对环境变化的鲁棒性较高,能够为其他模块提供更加有用的信息。但是,立体视觉算法在使用过程中还是存在一定的缺陷,无法对图像区域中盲点的位置进行准确的分析,计算速率相对较慢[2]。
2.1.3 基于图像特征的车辆行人检测系统
基于图像特征的车辆行人检测系统是最简单的检测方法,通过直接对图像的强度值进行阈值分类而获取车辆前方的准确信息,帮助驾驶员作出更加明智的判断。众所周知,在正常情况下,人体的温度要比周围环境的温度高,因此可以通过对红外图像中的热点区域进行分析,从而对行人的候选区域进行分割。在选择阈值的时候,可以从单一阈值和多阈值两个方面进行考虑。在对红外图像进行分割的時候,应该首先分割出图像中比较明亮的区域,从而对地面位置进行估计,结合人体身高的区域范围进行更加准确的分析。基于图像特征的分析方法最大的优势就是不需要依赖于其他的设备,能够直接对图像进行分析。但是,这种情况只是针对比较单一的环境,当周围环境变得非常复杂的时候,就无法对鲁棒性作出更加完善的定义[3]。
2.1.4 基于规则的车辆行人检测系统
在使用车辆行人检测系统的时候,针对不同的检测场景,人们会制定一些特殊的规定来缩小搜索的范围,从而作出更加准确的判断。像是在进行场景驱动搜索的时候,不需要对场景中所有的行人进行检测,只需要对与被测车辆有联系的行人进行检测。利用是否存在满足车辆尺寸限制的水平和垂直边缘来触发检测,当存在对象呗车辆局部遮挡的时候,才会进行跟踪检测,在一定程度上缩小了检测的范围。这种检测方法的优势在于能够更加直观、高效的对行人进行跟踪检测,在特定场景中的实用性较强。但是,这种方法只是在特定的场景中才会发挥最大的作用,没有一种能够适合所有场景的规则,普适性比较差[4]。
2.2 目标识别
2.2.1 提取目标特征
提取目标特征主要分为三个方面,分别是对原有特征进行改进、对新特征进行提取和在非可视光谱上的应用。对原有特征进行改进是指对梯度方向直方图特征的改善,梯度方向直方图具有纬度高、计算复杂的基本特征,要想更加快速的进行信息提取,就必须要进行原有特征的改进。近几年来,学术界对特征表示领域的研究越来越集中,对于梯度空间分布的描述也更加的完善,其维度特征日益显著,计算过程也更加的复杂,对于新特征提取的加速更是势在必行[5]。
2.2.2 分类器的构造
在车辆行人检测系统运行的过程中,最常见的分类器为SVM和Boosting,为了提升车辆行人检测系统的使用效果,对SVM分类器和Boosting分类器的改进是非常必要的。SVM分类器的构造建立在结构风险最小化原理的基础之上,一经提出就受到了学术界的高度追捧。随着时代的不断进步,SVM分类器的构造也应该进行适当的完善,进一步的提升其分类性能,为车辆行人检测系统的正常使用提供基本保障。Boosting分类器中的Adaboost的算法在车辆行人检测系统中的应用最为广泛,具有实时人脸检测的功能。但是,在实际使用的过程中,经常会出现由于视角不同而造成严重的问题,不利于车辆行人检测系统的正常运行[6]。
3 基于机器视觉的车辆行人检测系统技术的展望
目前,基于机器视觉的车辆行人检测系统技术在汽车领域中的应用已经非常广泛,逐渐呈现出两种发展方向。从产业界的角度来看,要想提高车辆行人检测系统在实际应用中的可靠性和有效性,需要通过对产业界的集成来推出更加实用的产品,促进产业界产品的全面、稳定发展。从研究接的角度来看,要加强对行人检测系统技术难题的研究与解决,针对不同的场景环境制定不同的解决方案,及时面对阴天、雨天等特殊的天气状况,也能够充分发挥出车辆行人检测系统的重要作用。另外,还要制定更加完善的行人检测系统性能评价标准,为车辆行人检测系统的正常使用提供基本保障[7]。
4 结语
综上分析可知,随着城市化进程的飞速发展,道路交通环境的发展情况越来越复杂,行人检测系统技术在车辆运行中受到了高度的重视。本文基于机器视觉的车辆行人检测系统技术进行分析,明确系统构建的流程,针对其中区域分割和目标识别两项关键技术进行研究,了解不同技术的优点和缺点,最后根据综述分析内容对未来的技术研究做展望和分析。
参考文献
[1]李琦.面向行人群信息提取的视频图像目标跟踪算法研究[D].北京交通大学,2013.
[2]樊龍夫.智能交通行人检测系统的分类技术研究[D].中国科学技术大学,2010.
[3]郭强.基于运动特性的行人检测技术研究[D].吉林大学,2011.
[4]邓锦豪.基于视频图像的行人检测算法研究[D].华南理工大学,2011.
[5]尹金楷.基于样本比对法的车辆前方运动行人检测系统设计[J].轻工科技,2014,09:72-73.
[6]许腾,黄铁军,田永鸿.车载视觉系统中的行人检测技术综述[J].中国图象图形学报,2013,04:359-367.
[7]张铂.基于CCD摄像头的车辆前方道路行人检测[D].吉林大学,2014.
