机器人技术的实验教学改革与实践
2017-04-07张波涛吴秋轩
张波涛, 王 坚, 吴秋轩
(1. 杭州电子科技大学 自动化学院, 浙江 杭州 310018;2. 圣彼得堡国立信息技术、机械与光学大学 计算机技术与控制学院, 圣·彼得堡 197101)
实验课程改革
机器人技术的实验教学改革与实践
张波涛1, 王 坚2, 吴秋轩1
(1. 杭州电子科技大学 自动化学院, 浙江 杭州 310018;2. 圣彼得堡国立信息技术、机械与光学大学 计算机技术与控制学院, 圣·彼得堡 197101)
针对“机器人技术”实验教学中所存在的问题,从实验内容组织、机器人实验平台构建、教学方法等方面提出了“机器人技术”课程的实验教学改革的思路。利用模块化的实验降低实验入门的难度,采用了学生自制实验平台与高级通用实验平台相结合的方法,建立了一种分层训练实验模式。以项目教学法为主,将机器人技术实验课程变成实验技能训练、项目训练、理论与实践相结合的交互平台,从而达到了提高学生理论应用能力与综合实验技能的目标。
移动机器人; 项目教学法; 分层训练实验平台
机器人技术涉及运动控制、计算机视觉、人工智能、传感器技术等研究领域。早期机器人主要用于工业现场的焊接、安装与搬运,随着相关技术的不断发展,兼具可移动性与操作能力的移动机器人得到了更多的关注,目前此类机器人主要应用于军事技术、未知空间探索等。近10年以来,随着人力资源成本的提高,以及计算机硬件成本的降低,机器人被大量应用于工业生产现场,并逐渐用于医疗、家庭服务等领域[1-2]。移动机器人系统属于非线性的复杂自动控制系统,对计算机、电子、机械等领域的技术均有涉及,并要求设计开发人员具有较强的系统集成能力[3-5]。因此,移动机器人实验平台可用于训练自动化专业相关知识的综合应用能力。在用机器人实验平台培养行业人才方面,实验教学研究者已进行了许多探索与实践,并提出了许多富有启发性的建议[6-9]。
本文结合企业对人才的需求,设计了新的实验教学方法,将声呐、激光、IMU等传感器的应用引入实验课程,采用分层实践教学模块,将小型应用项目引入课堂,开展项目教学法。以应用性项目驱动学生的学习动机,项目教学与实验训练交互开展,以此培养学生的项目经验、专业理论应用能力和创新能力。
1 “机器人技术”实验的特点与现状
杭州电子科技大学所开“机器人技术”类实验课程的原授课内容主要包括传统工业机器人运动学、动力学方面的建模与规划仿真、轨迹跟踪实验等。机器人技术的分支学科发展极其迅速,因此,其实验课程的内容须根据技术的发展不断更新[3]。原来的实验内容与教学方法已难满足机器人企业对人才培养的需求[6-7],例如传感器技术、图像处理、硬件设计、系统架构等关键技能,虽然对机器人技术的理解和应用具有重要意义,但却难以在实验中得到训练。
同时,许多与机器人技术相关的课程并非专业必修课,或在高年级才开设,因此,多数参与实验的学生很难具备完整的理论基础。针对此问题,将实验内容模块化,分层次进行实验训练,学生可预先有选择地自学对应模块的基础知识,然后从一个子领域切入机器人技术,如图像处理、机器人运动控制等。
2 “机器人技术”实验的改革与探索
实验设置的改革主要如下:增加项目教学法的应用,采用模块化教学法,避免理论基础过多对机器人技术实验训练的影响,实现教学内容的实时更新,将机器人技术的新理念、新技术引入课堂。
2.1 基于项目的实验内容设计
项目教学法要求实验人员在教师的指导下收集信息、设计方案、执行项目,通过项目的实施,可以了解项目的实施过程及各环节的关键技术[10-11]。“机器人技术”项目实验以机器人竞赛项目、大学生创新创业训练计划项目为依托,将项目教学法用于机器人技术的实验教学,实验内容包括“购物机器人设计”“物流搬运设计”“导游机器人设计”等。
在实验过程中,每3~5人为一个项目团队,实验内容如下:
(1) 机器人常用传感器应用,如单目/多目摄像机、IMU、激光、声呐、红外、GPS等;
(2) 图像处理算法,如目标匹配与跟踪、图像分类、图像分割、轮廓检测、显著性区域提取等内容,如图1(a)所示;
(3) 系统结构设计与系统集成,如图1(b)与图2所示;
(4) 机械设计与电路设计,如机械结构设计与加工、电机驱动模块设计、电源模块设计等,如图1(c)与(d)所示;
(5) 上层与下层软件设计。

图1 项目实验训练案例

图2 购物机器人系统结构案例
通过理论—实验训练—讨论—再实验训练的学习过程,使学生得到较好的理论与技能训练。实验内容与训练方法改革前,学生面对实际项目时常常力不从心,改革后,学生的实验水平和理论应用能力显著提高,其中,2014年和2015年,课程相关学生参加浙江省高校机器人邀请赛,获得一等奖1项、二等奖3项、三等奖2项、最佳技术奖1项;2016年,课程相关学生参加浙江省第一届大学生机器人竞赛,获得二等奖1项、三等奖2项;2016年,“仿生蜥蜴机器人的野外监控研究”“基于红外与图像处理的小型搜救机器人”等项目获大学生创新创业训练计划项目资助。
2.2 分层模块化实验教学
完整的机器人知识体系要求学生具有一定的数学理论基础,同时,对计算机语言与数据结构、机械设计与作图、电子设计等都有一定了解。但对本科生和低年级研究生而言,具备这种基础的学生极为少见。为了降低入门难度,采用了分层模块化实验内容设置。
模块化实验教学将机器人知识体系分为:
(1) 机器人系统与结构设计,如图3所示;
(2) 传感器应用与分析,如图4所示;
(3) 运动控制与规划等模块。

图3 基于图像的机器人视觉伺服系统
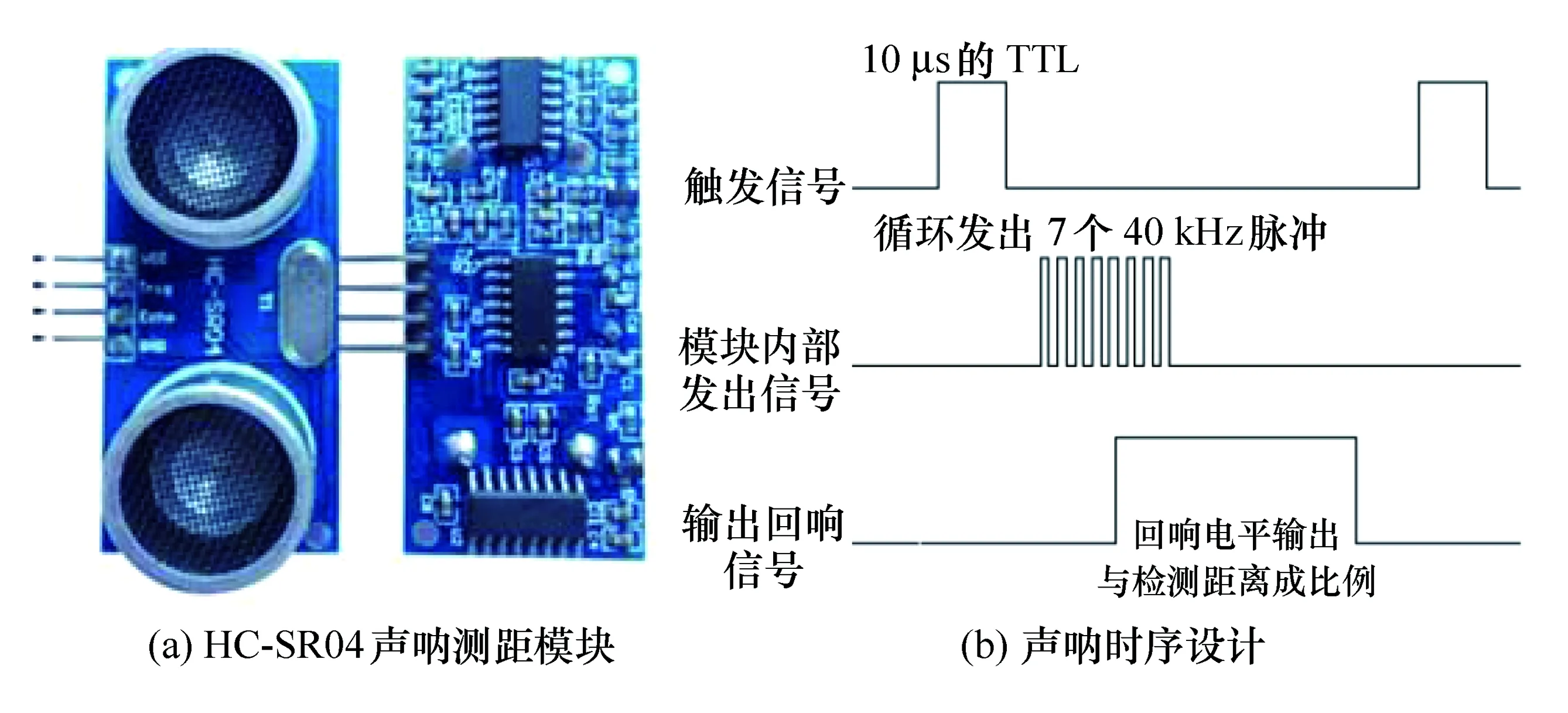
图4 声呐传感器
在基础理论学习阶段,学生要参与所有模块的理论学习,但是在项目教学阶段,每位学生根据自己的基础和兴趣选择一个项目模块,自学相关知识,进行实验训练。这种将知识模块化的模式的主要目的是让学生先掌握某一方面的知识,然后再向其他知识模块拓展,从而避免了入门初期大量的基础理论学习,让学生早进入实验训练阶段,边实验边进行理论学习。
分层实验教学是指采用不同层次的实验设备与实验内容训练不同水平的学生。与模块化实验教学的目的类似,分层实验教学也是为了降低机器人技术相关实验的准入门槛,根据学生的水平不同,采用不同的设备、不同的实验内容进行培养,如表1所示。

表1 分层实验训练
3 实验室建设与使用方案
基于项目教学法的实验教学方式需要进行相应的实验室建设,实验室配备了高精度三维运动捕捉系统、小型3D打印机、小型机床、示波器等加工测试设备。
针对学生基础水平参差不齐的现象,在教学中采用不同层次的机器人平台培养不同水平的学生。低端的模块化机器人主要用于培养低年级本科生,这种机器人具有结构简单、易于上手的特点,可以避免初入门的学生对机器人技术产生畏惧心理。高年级本科生和研究生可以自制机器人,如图5所示,完成机器人硬件的设计与加工、软件系统设计与实现。此外,还购置了Aldebaran Robotics 公司的Nao机器人平台、Mobilerobots公司的Powerbot与P3-DX机器人平台以及PR2等机器人研究平台,可以用于训练学生的智能算法设计能力、传感器应用能力等,如图6所示。
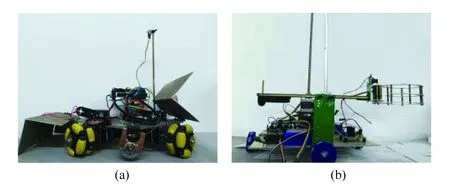
图5 学生自制机器人平台

图6 Nao与P3-DX机器人研究平台
4 结语
机器人技术涉及多学科交叉,且具有探索性、创新性的特点,其发展对制造业的产业升级具有重要意义。分层模块化的实验训练模式可以明显降低机器人技术实验的入门难度,使更多低年级学生可以提早参与机器人技术的学习。项目教学法提高了学生的理论应用能力与综合实验技能,培育了学生的团队合作能力,有项目训练经验的学生在参与学科竞赛和科研项目时获得了较好的效果。
References)
[1] 王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014, 50(9):1-12.
[2] Neumann M, Predki T, Heckes L,et al.Snake-like, tracked, mobile robot withactive flippers for urban search-and-rescue tasks[J].Industrial Robot,2013,40(3):246-250.
[3] Siegwart R,Nourbakhsh I R. Introduction to Autonomous Mobile Robots[M]. Massachusetts: MIT Press,2004.
[4] Craig JJ.Introduction to robotics: mechanics and control[M].London: Pearson Education,2005.
[5] 蔡自兴.机器人学[M].北京:清华大学出版社,2009.
[6] 胡红生,王娟,孙江,等.机器换人产业背景下的地方高校应用型人才培养模式[J]. 实验室研究与探索,2016,35(3):186-191.
[7] 程智勇,李晓娟.搬运工业机器人的教学仿真系统设计[J].液压与机床, 2015,43(3):95-98.
[8] 韩红玲,崔志恒.基于单片机的移动机器人实验研究[J].实验技术与管理,2012,29(8):43-47.
[9] 梁明亮,赵成.基于嵌入式技术的四轮驱动教育机器人设计[J].实验技术与管理, 2012,29(11):82-86.
[10] 赵海冰,李瑛,邢翠芳.浅谈项目教学与任务驱动在“C程序设计”教学中的应用[J].计算机工程与科学,2014,36(增刊2):319-321.
[11] 张琼.知识运用与创新能力培养:基于创新教育理念的大学专业课程变革[J].高等教育研究,2016,37(3):62-67.
Reform and practice of experimental teaching in Robotics Technology
Zhang Botao1, Wang Jian2, Wu Qiuxuan1
(1. Institute of Automation, Hangzhou Dianzi University, Hangzhou 310018, China; 2. School of Computer Technologies and Controls, ITMO University, St.Petersburg 197101, Russia)
Based on problems of the experimental teaching in robotics technology, an idea of reform is proposed, which covers the teaching content, robot platform construction and teaching method. A hierarchical training experimental platform was built by the combination of the advanced general experimental platform and the students’ self-made experimental platform. The modular experiment to reduce the difficulty of learning the robotics technology was used. This project-based teaching method turns the experimental teaching course into a platform where training for experimental skills, project undertaking possible and the interaction between theory and practice, which in the long run, can improve students’ ability in theory application and comprehensive practical skills.
mobile robot; project-based teaching method; hierarchical training experimental platform
2016-11-06 修改日期:2016-11-18
国家自然科学基金项目 (61503108);浙江省高等教育教学改革项目(kg2015130)
张波涛(1982—),男,山东潍坊, 博士,讲师,研究方向为智能机器人的导航与规划.
E-mail:billow@hdu.edu.cn
G642.0
B
1002-4956(2017)3-0199-03
