基于二次转矩分配的电子差速系统设计*
2017-04-06吴道龙杨林金洋
吴道龙 杨林 金洋
(上海交通大学,上海 200240)
基于二次转矩分配的电子差速系统设计*
吴道龙 杨林 金洋
(上海交通大学,上海 200240)
为提升分布式驱动车辆在转弯过程中的动力性和稳定性,对电子差速控制系统进行了研究。提出了插电式混合动力客车轮毂电机目标转矩的二次分配策略:以两侧车轮垂直载荷比为转矩分配标准的第1次目标转矩分配和以车轮滑动率进行转矩修正的第2次目标转矩分配。经试验验证,该控制策略能够很好地实现电子差速控制,且在电机转矩控制和车辆滑动率控制上具有较高的控制精度。
1 前言
集中驱动式车辆因转弯时内、外侧车轮转向半径不同,导致车辆竖直轴上产生偏转力矩,直接影响车辆的动力性和稳定性。分布式驱动车辆中,电子差速系统通过定向地分配同一轴上两侧车轮的转矩,使两轮产生大小相等、方向相反的偏转力矩,可以提高车辆的动力性和稳定性[1~4]。
目前,国内外学者在电子差速系统控制策略设计中,对轮毂电机目标转矩的确定主要采用等转矩分配方式,并通过反馈的滑动率进行转矩修正[5~7]。由于这种转矩分配方式无法产生偏转力矩,导致车辆在转弯过程中出现拖滑或滑转等严重影响车辆安全性的现象。本文提出的二次转矩分配策略能够有效解决该问题,能够通过主动、有差别地分配左、右两侧驱动轮的输出转矩,快速调节两侧车轮的滑动率,保证滑动率的一致性,降低车辆行驶的安全风险。
2 整车控制器总体设计
控制系统总体框架如图1所示,共设计两路CAN网络:一路与动力电池通讯,获取电量、电压、输出电流、故障情况等电池状态数据,为电机控制提供数据基础;另一路与2个轮毂电机通信,获取电机的转速、实际输出转矩、转子温度等信息,并向电机传递整车控制器的转矩控制指令。高压控制柜的主要功能是控制电机与电池之间的高压线连接,整车控制器通过I/O接口控制高压控制柜中的继电器,使其有效控制轮毂电机的高压供电。

图1 控制系统总体框架
油门踏板和制动踏板的输出电压范围为0~5 V,电压输出信号通过AD采样芯片输入整车控制器芯片,并计算得到当前的油门踏板或制动踏板的开度,通过预设的整车最大功率即可计算出当前的总需求功率和转矩,并将计算所得的总需求转矩信号,通过电子差速控制策略进行轮毂电机目标转矩的分配。总需求功率Pre和总需求转矩Tre为:
式中,μ=Vapp/5为油门/制动踏板开度;Vapp为油门/制动踏板输出电压;Ptotal为整车所能提供的最大功率;v为车速。
3 电子差速系统控制策略
电子差速系统控制策略的结构如图2所示,由滑动率计算模块、模糊控制模块、二次目标转矩分配模块和PI控制模块组成。其中,ω3、ω4分别为左、右侧轮毂电机的转速;v3、v4分别为左、右侧车轮中心的运动速度;S3、S4分别为左、右侧轮胎的滑动率;θ为转向盘转角;Tr31、Tr41分别为第1次转矩分配时左、右侧轮毂电机的目标转矩;Tr32、Tr42分别为第2次转矩分配时左、右侧轮毂电机的目标转矩;T3、T4分别为左、右侧轮毂电机反馈的实际转矩;α3、α4分别为模糊控制器产生的左、右侧转矩修正系数;u3、u4分别为PI控制算法对左、右侧轮毂电机的控制量。

图2 电子差速系统控制策略结构
轮毂电机第1次目标转矩分配基于车辆动力学方程,结合当前车速和转向盘转角信号,计算两侧车轮的垂直载荷比,并按该比例进行转矩分配。车辆在行驶过程中,相关参数会发生波动,且不同的路面情况也会导致轮毂电机第1次目标转矩分配结果并不一定适合于车辆当前的行驶工况,所以引入两侧车轮滑动率进行轮毂电机第2次目标转矩分配,进一步提高车辆行驶时的稳定性。如果车辆在冰雪等滚动摩擦因数较小的路面行驶时,第1次转矩分配后仍无法避免车辆甩尾等现象,则只有通过实时监测车轮的滑动率情况,同时减小两侧车轮的转矩分配才能有效避免甩尾现象。
3.1 滑动率的计算
在不同路面条件下,路面附着系数与滑动率的关系如图3所示[8],不同的路面条件下均存在相应的最佳滑动率,为了保证安全,一般将车轮的滑动率控制在最佳滑动率以内,本文以干燥路面为例,将车轮滑动率控制在15%以内。滑动率控制模块的主要功能是设定车轮滑动率目标并将其限定在15%以内,防止滑动率过高使车辆不稳定。
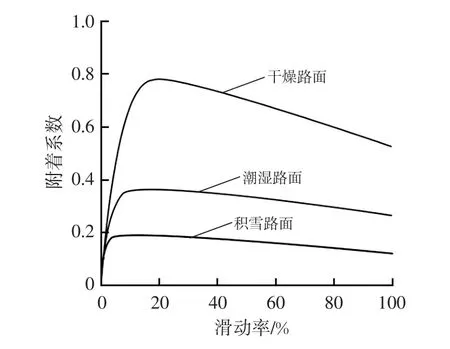
图3 路面附着系数与滑动率的关系
由于两侧驱动轮中的轮毂电机转矩可调,通过合理的电子差速控制方法即可将驱动轮的滑动率控制在目标范围内,从而避免车辆转向时出现拖滑或滑转现象。滑动率可通过反馈的实际车速和轮毂电机转速计算得到[9]:

式中,i为车轮编号;ωi为轮毂电机的转速;vi为车轮的纵向速度;R为车轮滚动半径。
3.2 模糊控制算法
模糊控制器输入变量的论域设为[-15,15](将15%放大100倍后),输出变量的论域设为[-1,1]。输入项和输出项分别设为5个等级,即NB、NS、Z、PS、PB,其隶属度函数如图4、图5所示。

图4 输入变量隶属度函数
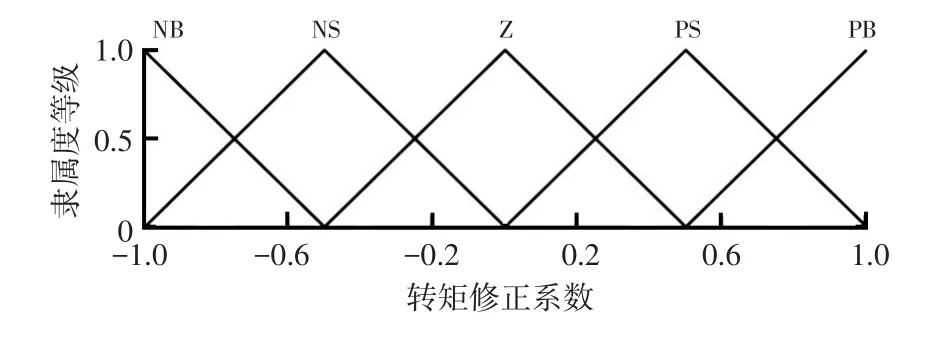
图5 输出变量隶属度函数
3.3 目标转矩的第1次分配
车辆在转弯时,离心力的作用导致内侧车轮载荷减小,外侧车轮载荷增大,即车轮载荷发生转移,且随着车速的提高和转向盘转角的增加,载荷转移的现象愈发明显。摩擦力与载荷成正比,故而轮毂电机目标转矩按两侧车轮的载荷比进行第1次分配,能够最大限度地提高驱动力。
通过多自由度车辆动力学方程分析,并经过理论计算得到,车辆转弯时左、右两侧车轮的垂直载荷比为[10]:

式中,W为车辆重心到后桥的水平距离;H为车辆重心到地面的高度;L为车辆长度;B为车辆宽度的1/2;g为重力加速度。
通过解析踏板信号获取总需求转矩Tre,并结合两侧车轮的载荷比,计算可得两侧车轮的目标转矩:

3.4 目标转矩的第2次分配
车轮的滑动率能够实时反馈当前车辆的行驶状态。车辆滑动率过高,常表现为两种状态:一是由于路面附着系数较低,车轮打滑严重,使车辆出现甩尾等现象,此时应降低车轮驱动力;二是某个车轮陷入水坑或是沙坑中,出现打滑现象,此时应进行车轮转矩转移,使其尽快摆脱困境。滑动率过低常常出现在车辆处于爬坡阶段且路面摩擦因数较大时,此时应适当增加驱动轮转矩,使车辆尽快通过坡道。
目标转矩的第2次分配通过车轮反馈的滑动率进行转矩修正,其目标转矩为:

当车轮滑动率小于目标滑动率时,其转矩修正系数α3、α4小于0,将增大轮毂电机目标转矩;反之,则α3、α4大于0,减小轮毂电机目标转矩。通过第2次转矩分配,不论车辆是否处于转弯状态,都可实现转矩的修正,提高车辆驱动时的稳定性。
3.5 PI参数整定
PI参数整定方法有两种:解析法和经验法。解析法主要应用于被控对象传递函数已知的情况,通过建立相关的函数关系式,求解出最优的PI参数。由于本文的研究对象轮毂电机是强耦合、多变量的非线性时变系统,无法用传递函数表示,故而采用经验法进行PI参数整定。
经验法也称凑试法,即通过不断调整PI参数,观察试验结果,使其满足控制需求。首先整定比例环节,将比例参数由小到大调整,观察系统响应,直至出现响应速度快、超调较小的响应曲线;然后观察响应曲线是否出现净差,如果出现则需调整积分环节的参数,先将积分环节参数设定为一个较大的值,并将已经调整好的比例环节参数适当减小,再逐渐减小积分环节的参数,如此反复,直到控制效果符合要求。由于被控对象为轮毂电机,其转矩响应速度较快,因此采用PI控制即可满足控制要求。
4 试验与结果分析
本文研究了传统汽车动力系统结构方案,以大通V80汽车(发动机前置前驱)为试验对象,将轮毂电机安装于后轮处,实现动力系统的耦合,并引入整车控制器协调控制轮毂电机和发动机,实现传统汽车的混合动力化。其动力系统结构如图6所示,其中ECU为发动机控制器;TCU为自动变速器控制器;HCU为整车控制器;BMS为电池管理系统;MC为轮毂电机控制器。改装后的样车属于混合动力四驱车,具有3种驱动模式:纯电机驱动、纯发动机驱动和混合驱动。

图6 试验样车动力系统结构
本次试验的主要目的是验证电子差速系统控制策略的准确性,所以通过整车控制器发送相关控制指令,使其工作模式为轮毂电机后驱模式。车辆及轮毂电机的相关参数如表1所示。
为了验证本文提出的二次转矩分配控制策略对电子差速控制的准确性,与传统模糊PI控制策略进行对比试验,传统模糊PI控制策略结构如图7所示,总需求转矩先进行等转矩分配,再根据车轮滑动率对轮毂电机的目标转矩进行修正。

表1 车辆及轮毂电机参数

图7 传统模糊PI控制策略结构
试验时,调节油门踏板信号使车速达到约10 km/h,并固定油门踏板不动,使其保持匀速运动状态。相同的试验环境和输入相同的转向盘转角信号(见图8)条件下的试验结果如图9、10所示。
由图9、图10可以看出,二次转矩分配控制策略的控制效果明显优于传统模糊PI控制策略。本次试验设定的滑动率控制目标为9%,传统模糊PI控制策略的滑动率控制绝对值平均误差为0.002 4,二次转矩分配的滑动率控制绝对值平均误差为0.001 5,后者控制效果较前者提升了37.5%。
由于传统模糊PI控制策略仅仅考虑到车辆滑动率对转矩分配的影响,忽略了车速与转向盘转角的影响,而且当控制器发现滑动率不满足控制需求时再调节转矩分配,在一定程度上会产生延迟,导致控制信号的波动与滞后。虽然传统模糊PI控制策略与本文提出的二次转矩分配控制策略都存在模糊控制,但是二者的模糊控制对转矩修正程度相差较大,由于传统模糊PI控制仅仅依靠车辆滑动率来调节转矩分配,缺少转矩的预分配环节,因此其模糊控制模块对转矩的修正幅度远大于二次转矩分配控制策略的修正幅度。也就是说,传统模糊PI控制策略对滑动率变化的敏感程度要远大于二次转矩分配控制策略,所以转矩分配波动较为剧烈。
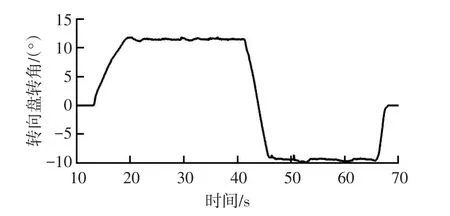
图8 转向盘转角信号

图9 两种控制策略转矩分配结果

图10 两种控制策略滑动率变化过程
为了进一步验证本文提出的二次转矩分配控制策略的准确性,进行了2组交叉对比试验。分别设定车速为10 km/h、转向盘转角为±30°、车速为30 km/h、转向盘转角为±10°,试验结果如图11~图14所示。

图11 两种控制策略转矩分配结果(车速30 km/h,转向盘转角±10°)

图12 两种控制策略滑动率变化过程(车速30 km/h,转向盘转角±10°)
从上述试验结果可以看出,二次转矩分配控制策略的转矩分配会随着转向盘转角和车速的变化而有所不同,且在不同车速和不同转向盘转角条件下,其转矩的控制精度和滑动率的目标控制明显优于传统模糊PI控制策略。二次转矩分配控制策略根据当前车速和转向盘转角信号进行的转矩预分配(第1次转矩分配)作为控制量的前馈信号,使控制的实时性与精度都得到了很大的提升,之后结合车辆滑动率进行的转矩修正使其更符合车辆当前行驶工况,提高了车辆行驶时的稳定性。

图13 两种控制策略转矩分配结果(车速10 km/h,转向盘转角±30°)

图14 两种控制策略滑动率变化过程(车速10 km/h,转向盘转角±30°)
5 结束语
本文提出的二次转矩分配策略经试验验证,能够很好地实现车辆的电子差速控制,相比于传统模糊PI控制策略,其转矩控制波动小,响应速度快,控制精度高,能够将车辆滑动率限制在目标值附近。
1 Duan M,Sun M,Li G,et al.Study on Electronic Differential Control of Four Wheel Drive In-wheel Motoreleectric Vehicle.Hydromechatronics Engineering,2015,43(24):60~66.
2 吴志红,朱文吉,朱元.电动车电子差速控制方法的研究.电力电子技术,2008,42(10):64~66.
3 徐寅,陈东.电动汽车差速系统研究综述.中国机械工程,2011,22(4):498~503.
4 张多,刘国海,赵文祥,等.电动汽车多电机独立驱动技术研究综述.汽车技术,2015(10):1~6.
5 陈东,徐寅,梁华军.双电机后轮驱动混合动力汽车电子差速控制的研究.汽车工程,2013,35(1):46~50.
6 严运兵,彭思仑.后驱电动轮汽车电子差速控制影响因素分析.汽车工程,2014,36(2):210~215.
7 孙会来,申焱华,金纯,等.轮边电驱动铰接式矿用汽车差速控制策略研究.农业机械学报,2014,45(11):27~33.
8 万家庆,贺汉根,陈杨,等.基于路面附着系数曲线的最佳滑移率计算方法.汽车科技,2004(6):13~16.
9 李志远,王涛,张庆培,等.轮毂电机驱动式微型电动汽车电子差速控制策略.河北大学学报:自然科学版,2015,35(4):422~426.
10 葛英辉,李春生,倪光正.DSP2407在电动车电子差速控制中的应用.电力电子技术,2003,37(5):1~4.
(责任编辑 斛 畔)
修改稿收到日期为2016年12月12日。
The Design of Electronic Differential System Based on Two Times Torque Distribution
Wu Daolong,Yang Lin,Jin Yang
(Shanghai Jiao Tong University,Shanghai 200240)
In this paper,the electronic differential control system was studied to improve the dynamic performance and stability of the distributed driving vehicle during turning.This paper presented two times distribution strategy in hub motor target torque for plug-in hybrid electric bus:vertical load ratio of two-side wheels for the torque distribution standard as the first target torque distribution and modifying target torque by the wheel sliding rate as the second target distribution.Results showed that the electronic differential speed control strategy proposed in this paper can achieve good control of the electronic differential speed,and had high control precision in the motor torque control and the vehicle sliding rate control.
Electronic differential system,Secondary torque distribution,Sliding rate,Hub motor
电子差速系统 二次转矩分配 滑动率 轮毂电机
U469.72
A
1000-3703(2017)02-0051-06
国家自然科学基金项目(51275291);上海汽车工业科技发展基金会项目(1502);上海市新能源汽车专项资金项目。
