基于变形履带的搜救侦察机器人设计与试验
2017-04-05边浩然资新运王洪涛唐粤清曾繁琦
边浩然,资新运,王洪涛,唐粤清,曾繁琦
(军事交通学院 a.究生管理大队; b.军用车辆系,天津 300161)
【机械制造与检测技术】
基于变形履带的搜救侦察机器人设计与试验
边浩然a,资新运b,王洪涛a,唐粤清a,曾繁琦a
(军事交通学院 a.究生管理大队; b.军用车辆系,天津 300161)
基于变形履带以及图像识别和红外感知信息融合进行了机动灵活、隐蔽性强的小型搜救侦察机器人的设计,研制的样机证明了可靠的通过性和对复杂地形的适应性。
变形履带;红外感应;搜救侦察机器人
城市反恐作战和灾害搜救中,机器人可协助人执行部分危险任务[1]。小型机器人具有易于伪装,隐蔽性强的特点,适于通过遭受炮火打击和灾害破坏后的狭小空间,其中以履带式移动机器人地形适应能力强而受到青睐。
本设计基于履带式移动方式,提出远程遥控机器人履带变形以适应不同地形和障碍的设计。遭遇低矮通道,可调整履带形状为直线,降低机身高度通过道;当路遇石块、建筑碎块等障碍时,可调整履带形状为三角形越过障碍[2]。
针对以往搜救机器人单纯通过图像搜寻人员效率低、环境适应能力差的缺点,提出了图像搜寻结合红外感知搜寻的方案,通过人体红外感知模块,操作人员可知道机器人周围是否存在生命体,再结合视频搜寻,提高了效率,增强了可靠性。图1为机器人系统框图。
1 结构设计
1.1 履带变形原理
变形履带机器人由前体、后体、驱动轮、前导轮、后导轮、履带、步进电机等构成,如图2所示。前体与后体通过步进电机铰接,可发生相对转动,驱动轮、后导轮、步进电机安装于后体,与后车体相对位置不发生变化。前导轮安装于前体,步进电机驱动前体转动时,前导轮绕步进电机公转,由此驱动轮、后导轮、前导轮相对位置可在直线和三角形两个状态间变换。履带连接3个轮子,轮子相对位置变化时,履带也可在直线和三角形两个状态间变换。通过调整前体转动角度,改变履带与地面间的角度,达到履带变形的目的。

图1 机器人系统框图

图2 机器人结构平面示意图
1.2 运动模式
机器人运动模式包括通过低矮通道模式、翻越地面障碍模式、主动扩大摄像头视界模式。
机器人在废墟中遇到低矮的狭窄通道,需降低自身高度,以通过低矮通道,如图3(a)。机器人翻越地面障碍,可根据地面障碍的形状、高度等调整履带形状,增强越障能力,如图3(b)。机器人通过控制履带变形抬高图像采集装置,扩大机器人视野,如图3(c)。
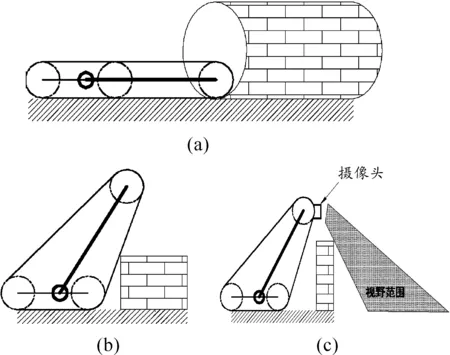
图3 机器人运动模式
1.3 越障过程分析
机器人可顺利越过障碍的条件包括:① 越障过程不会产生倾翻;② 越障过程有足够大的牵引力[3]。
用稳定锥法对机器人抗倾覆性进行分析[4],如图4所示分别为机器人纵向和横向越障状态,K为机器人质心,O1为机器人履带与地面交点,O2为履带与障碍物交点在水平地面的投影,d为质心到交点O1的水平距离。为简化分析模型,假设机器人与障碍均为正交,则稳定锥法抗倾覆条件简化为d≥0,即重心投影落在水平面投影落在O1O2内。

图4 机器人防倾翻分析
由于机器人越障过程中可控制调整姿态,进而调整质心位置,使质心在地面投影落在O1O2内, 最大限度避免机器人发生倾翻,增强了通过性。
机器人翻越障碍过程缓慢,可被看作是准静态过程,可利用静力学平衡原理分析运动过程[5]。机器人翻越突出障碍过程中受力情况如图5(a)。
K为机器人质心,N1,N2分别为机器人受地面和受障碍的支持力,f1,f2为分别为机器人与地面接触和与障碍接触点的驱动力,G为机器人所受重力。
机器人越过障碍的临界条件为:机器人重心K越过台阶边界线[6]。当质心越过台阶边界线后,重力提供翻转力矩,机器人就能翻越至台阶上表面,越障成功。
所设计机器人越障过程分为a→e5个阶段,机器人接触障碍后,在驱动力f1,f2的作用下向前、向上运动,根据前文的防倾翻分析,在a→c过程,逐渐控制减小机器人前体与后体夹角,以保证机器人不发生向后倾翻。随着机器人运动和前、后体相对位置的调整,质心位置不断向上、向前移动,在状态d,质心位置越过了障碍边界线。根据受力分析,可知此时机器人在重力力矩作用下,顺时针向前倾翻,成功越过障碍。
2 双搜寻模式
在执行人员搜寻任务方面,传统机器人多采用基于实时视频传输的视觉搜索模式,可准确定位人员位置。但在光线不足、人员隐蔽、搜寻范围过大等条件下,单纯的视觉搜寻模式具有图像不清晰、易遗漏、效率低的缺点。
设计中引入红外感应搜寻结合视觉搜索的双搜寻模式。机器人启动后,视觉搜寻和红外搜寻同时工作,当光线不足,摄像头传输回的图像不清晰时,红外模块便可发挥主要作用,由于红外模块是感知人体发出的红外线,不受光线不足影响,可正常工作,当感知到红外信号时,根据红外感应模块的感知范围,便可将目标初步定位在机器人一定范围内,为进一步搜寻目标确定范围。

图5 机器人越障过程分析
当被搜寻人员处于隐蔽位置时,回传视频受摄像头拍摄角度影响,容易遗漏某些位置死角。红外模块则可感知周围红外信号,不受摄像头视界范围影响。当机器人行进到某一位置,通过图像未发现目标人员但接收到红外信号时,操作人员便可判断出机器人周围存在目标人员,可在机器人周围再次进行更加仔细的搜寻,保证搜寻功能的可靠性。
当机器人搜寻范围过大,受机器人运动速度的影响,若从开始就对搜寻范围内每一处地点进行搜寻,效率必然降低。如图6所示,此时结合红外模块特点,首先进行粗略定位,控制机器人在搜寻范围内快速运动,当红外模块感应人员目标存在时,根据红外感应模块的感知范围,便可将目标初步定位在机器人一定范围内,而后在机器人感知范围内使用视觉搜寻模式,精确定位人员目标位置,提高搜寻效率。
3 硬件电路设计
机器人硬件电路主要包括:计算机、机载电源、视频采集摄像头、红外感应传感器、无线路由器、无线串口模块、机载数据处理器、直流电机、步进电机及各自驱动器等。图7为机器人系统硬件框图。
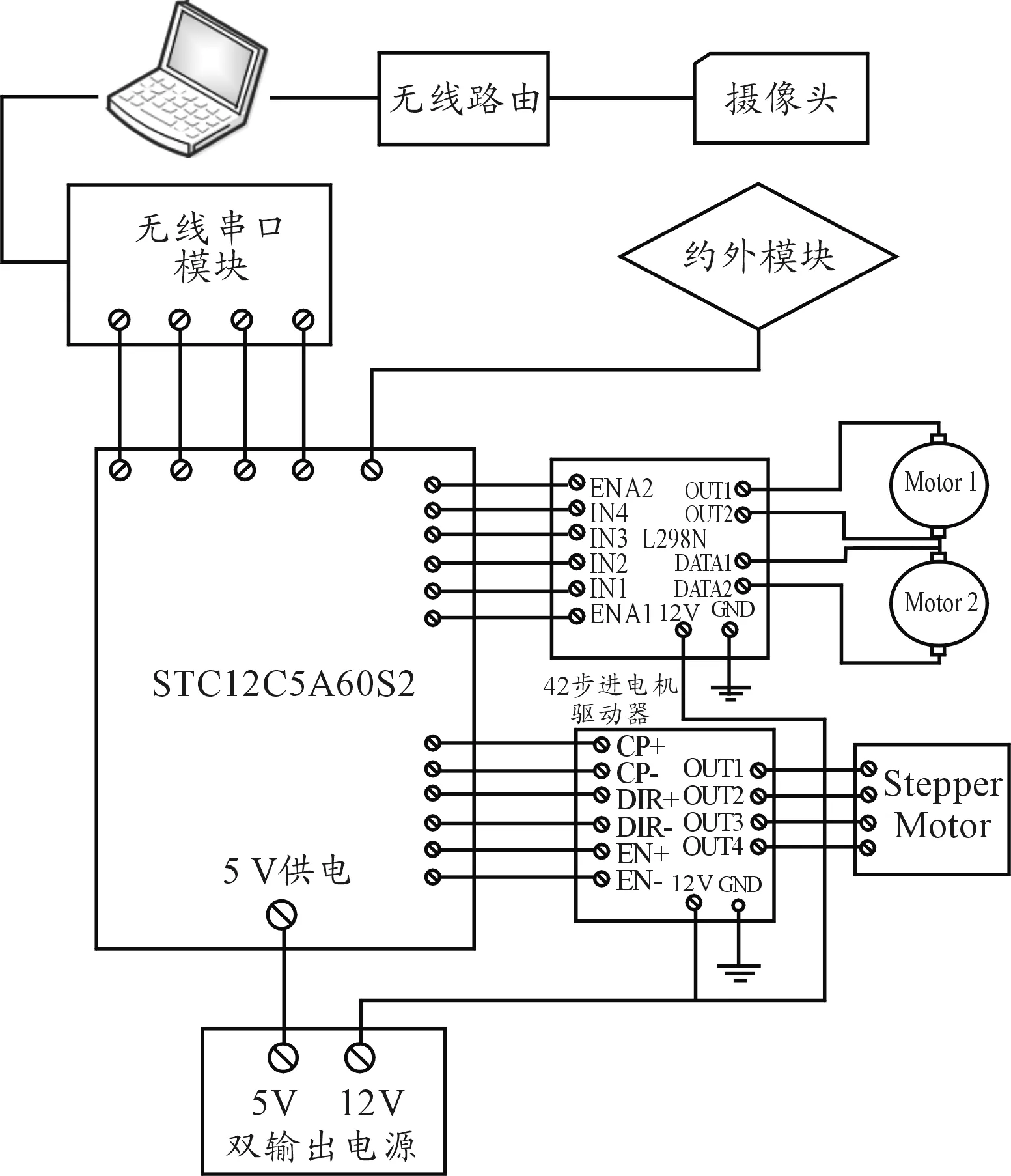
图7 机器人系统硬件框图
3.1 电机驱动
直流电机驱动采用L298N桥式驱动电路,由12 V电源供电口供电,本体数据处理器提供控制信号,同时驱动两路直流电机。驱动机器人变形的步进电机采用行星齿轮组减速增扭,输出扭矩3 N·m,满足机器人履带变形需要。
3.2 视频无线传输
无线视频传输部分包括摄像头、路由器,摄像头将采集的视频信息传入路由器,再由路由器发送至信号接收计算机。信号覆盖距离为100 m,满足机器人信号传输需要。
3.3 运动控制及红外信号通信
计算机发出控制机器人运动的信号以及红外模块将感应信号发送至计算机均采用无线串口通信方式。
无线串口通信系统由发送和接收模块组成,其中上位机串口模块通过USB转TTL接口与计算机进行数据交换,下位机串口模块则直接与机载处理器串口引脚连接。两模块可相互发送和接收数据。无线串口通信技术成熟,采用433 MHz通信,传输距离远,空旷场地传输距离达2 000 m,在室内墙壁阻挡信号环境下可传输100 m以上,基本满足机器人搜寻功能要求。
设计方案中,所选用的红外感知模块,感知距离7 m,当感知范围内有人员目标时,即输出电压信号,此信号通过机载处理器识别,而后经下位机无线串口模块发出,上位机串口模块接收到此信号,计算机便可识别、显示。
4 试验验证
制作机器人样机,如图8所示。根据机器人功能分析与定位,对机器人的越障能力、双搜寻模式效率进行实验验证。

图8 机器人样机
4.1 越障试验
试验选取翻越楼梯障碍。翻越过程如图9所示。

图9 机器人翻越障碍
机器人在翻越楼梯障碍时,总体良好,出现的问题在于样机制作时零件安装位置把握不足,整机质量过于集中在后车体部分,影响了机器人翻越障碍时质心位置,使能翻越的最高障碍降低,此缺陷可通过改变机器人零件安装位置优化。
4.2 搜寻效率检验

图10 机器人搜寻效率实验示意图
当搜寻范围较大,按照双搜寻模式,先粗略定位,再准确定位的方式,效率高于纯视觉搜寻,验证了设计的合理性。
5 结束语
设计了一种基于变形履带的小型搜救侦察机器人,通过履带变形,增强了其通过性;机器人采用视觉搜寻与红外搜寻相合的双搜寻模式,解决了在光线不足、人员隐蔽、搜寻范围过大等条件下搜寻目标人员,图像不清晰、易遗漏、效率低的问题。机器人总体性能良好,具有发展前景。
[1] 柴鈺,贾晓劢,卫苏晶.一种新型可变形智能救援机器人系统设计[J].测控技术,2014,33(5):77-81.
[2]MICIREMJ.EvolutionandFieldPerformanceofaRescueBobot[J].JournalofFieldRobotics,2008,25(1/2):17-30.
[3] 黑沫.可变履带机器人设计与运动分析[D].长沙:国防科学技术大学,2010.
[4] 刘金国,王月超.变形机器人倾翻稳定性仿真分析[J].系统仿真,2006,18(2):409-411.
[5] 李楠,王明辉,马书根,等.基于联合运动规划的可变形履带机器人在线翻越楼梯控制方法[J].机械工程学报,2012,48(1):47-56.
[6] 朱岩,王明辉,李斌,等.履带可变形机器人越障性能研究[J].机器人,2015,37(6):693-701.
(责任编辑 唐定国)
Design and Experiment of a Rescue-Search Robot Based on Deformable Track
BIAN Hao-rana, ZI Yun-xinb, WANG Hong-taoa, TANG Yue-qinga, ZENG Fan-qia
(a.Graduate Management Team; b.Department of Military Vehicle, Military Transportation University, Tianjin 300161, China)
A small rescue-search robot which is flexible and easily camouflaged was designed based on deformable track, image recognition and infrared sensing, and the reliable ground clearance and adaptability was proved by the prototype.
deformable track; infrared sensing; rescue robot
2016-09-30;
2016-11-10 作者简介:边浩然(1992—),男,硕士研究生,主要从事动力机械传动研究。
10.11809/scbgxb2017.03.033
边浩然,资新运,王洪涛,等.基于变形履带的搜救侦察机器人设计与试验[J].兵器装备工程学报,2017(3):143-146.
format:BIAN Hao-ran, ZI Yun-xin, WANG Hong-tao,et al.Design and Experiment of a Rescue-Search Robot Based on Deformable Track[J].Journal of Ordnance Equipment Engineering,2017(3):143-146.
TP242
A
2096-2304(2017)03-0143-04
