缓冲式运动中的腿部受力分析模型
2017-04-01王晓韬
王晓韬

摘 要: 针对缓冲式运动中的腿部受力分析建模难度较大,受力定量评估精度不高的问题,提出限定初始状态下误差跟踪的缓冲式运动中的腿部受力分析模型。该模型对缓冲式运动中的腿部各个关节驱动作用力矩进行受力行为控制约束参量分析,在限定初始状态下进行受力参量估计的误差跟踪,实现腿部受力动力学控制和关节驱动力矩计算。仿真结果表明,采用该模型进行缓冲式运动中的腿部受力分析,对受力行为的控制精度高,对腿部受力参量的估计误差小,促进对人体运动学的科学定量评估和分析。
关键词: 缓冲式运动; 受力分析; 力矩; 误差跟踪
中图分类号: TN911.1?34; TP273 文献标识码: A 文章编号: 1004?373X(2017)05?0122?04
Abstract: Since it is hard to analyze and model the leg force in the buffer type movement, and the force quantitative eva?luation has low accuracy, a leg force analysis model in the buffer type movement based on error tracking in the defined initial state is put forward. The force control constraint parameter is analyzed for the driving effect torque of each joint of the leg in the buffer type movement. The error estimated with the force parameter is tracked in the defined initial state to implement the leg force kinetic control and calculate the joint driving torque. The simulation results show that the model used to perform the leg force analysis in the buffer type movement has high precision of the force control and small estimation error of the leg force parameter, and can benefit the scientific quantitative evaluation and analysis for the kinesiology.
Keywords: buffer type motion; force analysis; torque; error tracking
0 引 言
随着人体科学和体育科学的结合,采用人体运动力学分析方法进行体育运动中的力学行为分析,提高体育科学组训的效能。在缓冲式运动中,人体的腿部受到的力学冲击变化具有突发性和非平稳性,对缓冲式运动的腿部受力行为分析,促进田径运动的发展方面具有重要意义。研究运动中腿部的受力行为结合了力学、控制学和计算机仿真学方面的知识,需要采用力学行为分析方法分析腿部受力的影响参量,进行腿部发力和力学控制的数学建模,采用控制学方法进行腿部受力行为的特征分析和参量评估,实现腿部受力分析模型构建,进而指导人体运动中的科学训练和竞技[1]。
目前,对缓冲式运动中的腿部受力分析模型主要有:运动空间规划方法、Probabilistic RoadMap力学分解方法、姿态变换控制方法等[2?3]。采用人体在缓冲式运动中腿部的姿态变换和力学行为特征实现运动规划,根据人体在运动过程中工作空间末端效应位姿状态进行力学测量,引导运动中人体动量的传递性能定量分析和求解,取得了一定的研究成果。文献[4]提出一种基于滑模控制的下肢外骨骼动力学分析方法,并在下肢腿部受力分析中削弱稳态误差和抑制抖振,提高了力学分解的精度,但是该方法计算开销较大,在受力行为分析中的实时性不高。文献[5]采用一种基于7连杆模型结构的人体下肢动力学分析模型,求解缓冲式运动中的腿部受力各关节驱动作用力矩,实现下肢全部关节的驱动力矩优化求解,取得了较好的数值分析能力,该方法在先验特征数据采集不足的情况下,对力学参量的分析精度受到限制,且数学模型构建的复杂度较大。为了克服传统方法的弊端,本文提出一种基于限定初始状态下误差跟踪的缓冲式运动中的腿部受力分析模型,对缓冲式运动中的腿部各个关节驱动作用力矩进行受力行为控制约束参量分析,限定初始状态下進行受力参量估计的误差跟踪,实现腿部受力动力学控制和关节驱动力矩计算。最后通过仿真实验进行力学性能测试和数学验证,得出有效性结论。
1 参量描述及受力模型构建
1.1 系统参数和变量描述
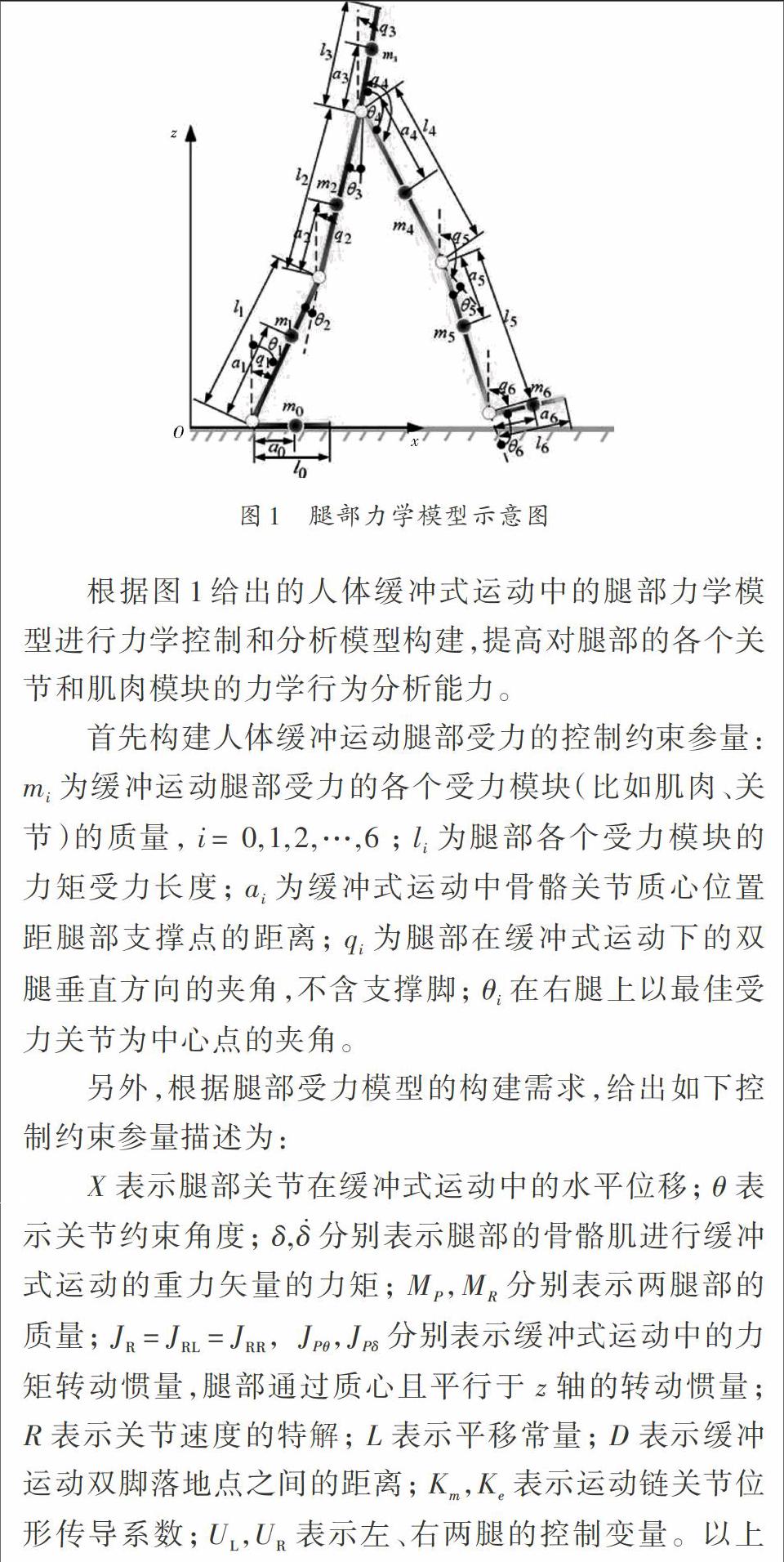
采用限定初始状态下误差跟踪控制方法进行缓冲式运动中的腿部受力分析模型构建。首先给出缓冲式运动中的腿部受力分析模型,人体在缓冲式运动中的腿部力学模型示意图如图1所示。
根据图1给出的人体缓冲式运动中的腿部力学模型进行力学控制和分析模型构建,提高对腿部的各个关节和肌肉模块的力学行为分析能力。
首先构建人体缓冲运动腿部受力的控制约束参量:[mi]为缓冲运动腿部受力的各个受力模块(比如肌肉、关节)的质量,[i=][0,1,2,…,6];[li]为腿部各个受力模块的力矩受力长度;[ai]为缓冲式运动中骨骼关节质心位置距腿部支撑点的距离;[qi]为腿部在缓冲式运动下的双腿垂直方向的夹角,不含支撑脚;[θi]在右腿上以最佳受力关节为中心点的夹角。
另外,根据腿部受力模型的构建需求,给出如下控制约束参量描述为:
[X]表示腿部关节在缓冲式运动中的水平位移;[θ]表示关节约束角度;[δ,δ]分别表示腿部的骨骼肌进行缓冲式运动的重力矢量的力矩;[MP,][MR]分别表示两腿部的质量;[JR=JRL=JRR,JPθ,][JPδ]分别表示缓冲式运动中的力矩转动惯量,腿部通过质心且平行于[z]轴的转动惯量;[R]表示关节速度的特解;[L]表示平移常量;[D]表示缓冲运动双脚落地点之间的距离;[Km,][Ke]表示运动链关节位形传导系数;[UL,][UR]表示左、右两腿的控制变量。以上各变量均采用国际单位。
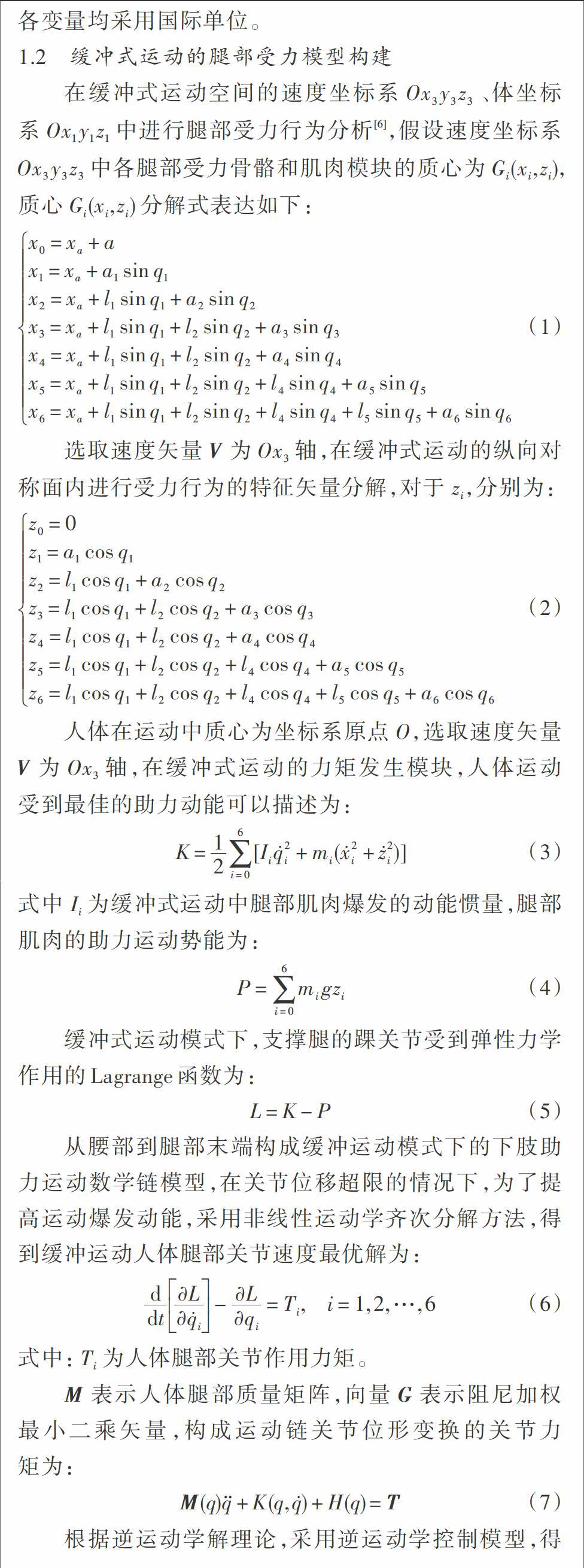
1.2 缓冲式運动的腿部受力模型构建
2 误差跟踪修正及腿部受力分析模型
2.1 问题的提出及误差跟踪
为了实现受力参量的定量评估和受力分析,提出基于限定初始状态下误差跟踪的缓冲式运动中的腿部受力分析模型,对缓冲式运动中的腿部各个关节驱动作用力矩进行自适应评估,得到几个约束条件如下:
对上述控制仿真求最优解,实现对缓冲运动下腿部受力参量估计,在整个运动受力时间过程中,取腿部的小腿、大腿、脚掌三处部位的受力参量估计结果如图2所示。
从图2得知,本文方法进行缓冲式运动中的腿部受力分析能实时准确估计出各个部位的受力强度值,实现对腿部受力的定量分析和评估,并且得出:随着运动过程作用时间的推移,腿部的受力变化具有不规则性和非平稳性;受力强度的大小排序依次为:大腿、小腿和脚掌。
为了测量本文方法的受力估计误差,得到误差收敛曲线如图3所示。分析得知,本文方法进行运动员腿部的收敛分析,能在较短的时间内使得误差收敛到零,收敛性能优于传统方法。
4 结 语
为了提高对缓冲式运动中腿部的受力行为分析的准确度,提出基于限定初始状态下误差跟踪的缓冲式运动中的腿部受力分析模型,对缓冲式运动中的腿部各个关节驱动作用力矩进行受力行为控制约束参量分析,在限定初始状态下进行受力参量估计的误差跟踪,实现腿部受力动力学控制和关节驱动力矩计算。研究得出,采用该模型进行缓冲式运动中的腿部受力分析,对受力行为的控制精度较高,收敛性较好,对腿部受力参量估计的实时性较好,实现对腿部各个部位受力强度的实时估计,在实现运动科学组训中具有较高的应用价值。
参考文献
[1] 李祖雄.一类具有反馈控制的修正Leslie?Gower模型的周期解[J].应用数学学报,2015,38(1):37?52.
[2] 武娟,许勇.加性二值噪声激励下Duffing系统的随机分岔[J].应用数学和力学,2015,36(6):593?599.
[3] 苏奇全,贾宏光,朱明超,等.基于递推闭环子空间辨识的自适应预测控制方法[J].信息与控制,2015,44(2):252?256.
[4] 唐志勇,谭振中,裴忠才.下肢外骨骼机器人动力学分析与设计[J].系统仿真学报,2013,25(6):1338?1344.
[5] 张作斌.单腿支撑及跑步模式下全关节驱动力矩仿真[J].科技通报,2014,30(6):191?193.
[6] 刘丹,王琥,李恩颖,等.基于Lanczos算法的模态重分析法及其在车身结构设计中的应用[J].计算力学学报,2015(2):167?173.
[7] 陈婷婷,阮秋琦.较大尺度运动下的人体特征点跟踪算法研究[J].信号处理,2014,30(7):787?803.
[8] XU Xiaobin, ZHANG Guangwei, SUN Qibo, et al. Precision configurable data aggregation algorithm in WSNs [J]. ACTA Electonica Sinica, 2014, 42(6): 1205?1209.
