增量式旋转编码器的简介与应用
2017-04-01王小祥

摘要:在自动控制系统中,编码器应用越来越广泛,不仅可以实现定位控制,而且能检测出转向及速度等信息。本文从增量式旋转编码器的工作原理、选型及应用三个方面进行阐述,让我们对增量式旋转编码器有一定认识,简述了增量式旋转编码器在PLC控制系统和单片机控制系统中的应用方法,为今后的在控制系统中灵活应用增量式旋转编码器打好基础。
关键词:增量式 编码器 应用
中图分类号:TH724 文献标识码:A 文章编号:1007-9416(2016)10-0118-02
编码器是一种光电式旋转测量装置,主要应用于工业控制中定位控制,使用时通过联轴器将旋转编码器安装在旋转轴上,构成一个半闭环自动控制系统,编码器可以将被测的角位移量或直线位移量转换成电信号,控制器根据编码器输出的电信号可以实现对运动的方向、位置及速度进行检测控制。
编码器按照其工作原理可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,根据起始和终止位置信息,可以到位移量。绝对式编码器通过读取输出的数字码可以得到位置信息,其输出线与数字码位数有关,且价格相对较贵,而增量式编码器输出脉冲信号,通过单片机或PLC对脉冲信号进行处理,就能够得到运动的位置、速度等信息,价格相对便宜,应用较为广泛。本文以增量式旋转编码器为例进行说明。
1 增量式旋转编码器的组成及工作原理
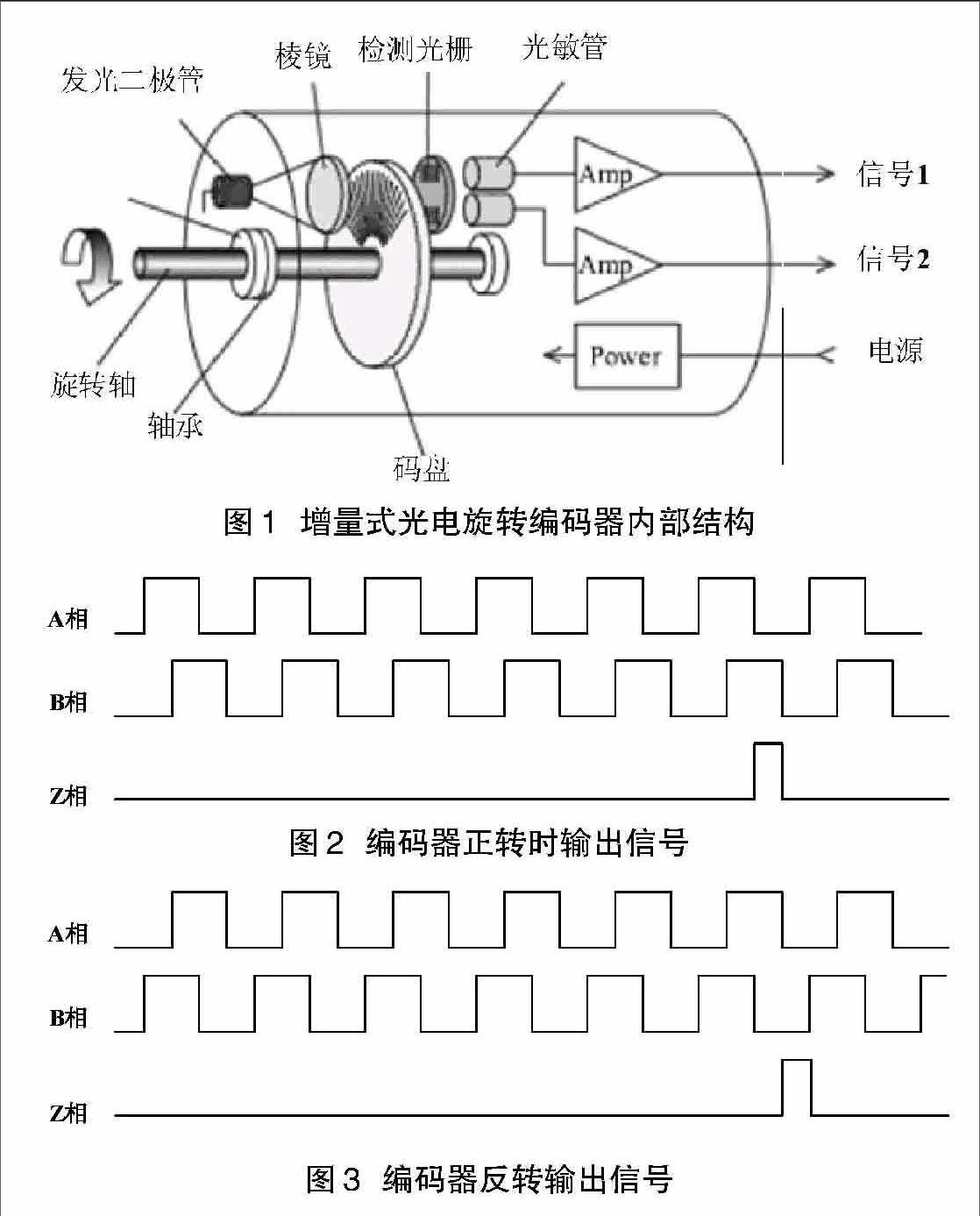
典型的增量式光电旋转编码器由码盘、检测光栅、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成,如图1所示。码盘和光栅板上刻有透光缝隙,当码盘随被测转轴旋转时,检测光栅不动,每转过一个缝隙,光线透过码盘和检测光栅上的缝隙照射到光电检测器件上,光电管会感受到一次光线的明暗变化,并将光线的明暗变化转变成近似于正弦波的电信号,经过整形和放大等处理,变换成脉冲信号。
增量式旋转编码器一般有三组信号A相、B相、Z相输出,在检测光栅上刻两组的透光缝隙,彼此错开1/4节距,使得光电检测器件输出的信号(A相、B相)在相位上相差90°。此外,在光電码盘的里圈里还有一条透光缝隙,码盘每转一圈产生一个脉冲(Z相),该脉冲信号称为零标志脉冲,作为测量基准。
当编码器随被测轴正(反)转时,A相、B相、Z相输出的信号如图2、3所示。编码器旋转一圈输出A相或B相脉冲的个数,主要由码盘上的透光缝隙决定。
由图2、3可知,正转时A相超前B相90°,反转时A相超前B相90°,因此可根据A相、B相信号的相位关系测出被测轴的转动方向。另外根据A相或B相脉冲的数目可测出被测轴的角位移,脉冲的频率可测出被测轴的转速。Z相在编码器每转一圈时会产生一个脉冲,可作为被测轴的定位基准信号,也可用来测量被测轴的旋转圈数计数信号。
2 增量式旋转编码器的选用
在选用增量式旋转编码器时,我们主要从分辨率、信号输出形式、工作电压、轴径及外形尺寸等方面考虑。
2.1 分辨率
编码器分辨率可以用线数、每转脉冲数(PPR)等来描述,它表示编码器旋转一圈A相或B相输出脉冲的个数,脉冲数越多精度越高,价格越贵。
2.2 信号输出形式
①集电极开路:集电极开路分为NPN型和PNP型,当编码器与PLC连接时,NPN型应与漏型输入的PLC连接,PNP型应与源型输入的PLC连接;当编码器与单片机连接时,应加上拉电阻(NPN型)或下拉电阻(PNP型)。
②电压输出:在NPN型集电极开路输出的基础上增加了上拉电阻。
③互补对称推挽输出:输出电路由NPN和PNP型两个三极管组成,驱动能力强。
④长线输出驱动:采用专用的线驱动芯片,为每路输出提供一个反向信号(A+/A-、B+/B-、Z+/Z-),信号以差分形式输出,抗干扰能力强,传输距离较远。
2.3 工作电压
工作电压有5V、12V、24V、5—24V等,根据现场需要选用合适的编码器。
2.4 轴径及外形尺寸
根据传动轴、联轴器以及安装环境选择合适轴径和外形尺寸的编码器。
3 增量式旋转编码器在自动控制中的应用
3.1 增量式旋转编码在PLC控制系统中的应用
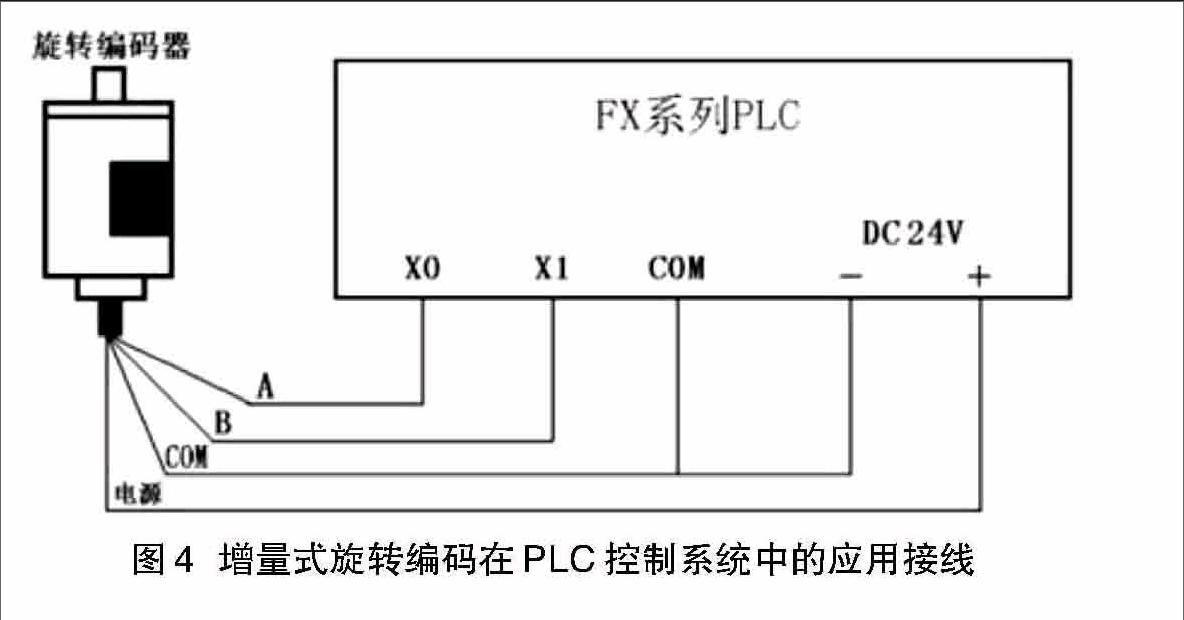
如图4所示,以三菱FX系列PLC作为控制器,由于编码器输出脉冲频率相对较高,因此需采用PLC内部的高速计数器进行计数,例如我们采用双相输入高速计数器C251,A相脉冲输入到X0,B相脉冲输入到X1,当使转动轴正转时,A相脉冲超前B相脉冲90°,高速计数器C251实现加计数,M8251状态为OFF,当使转动轴反转时, B相脉冲超前A相脉冲90°,高速计数器C251实现减计数,M8251状态为ON。正反转的信息可以通过M8251状态反映出来,位移量可以通过高速计数器的计数值反映出来。
旋转的圈数与输出脉冲之间的关系为:旋转的圈数=输出脉冲数/每圈脉冲数。如果将编码器安装在与电机同轴的丝杆上,丝杠的螺距确定后,我们可以通过运算得出运动的距离(旋转的圈数*丝杠的螺距)。另外利用PLC速度检测指令SPD可以计算出运动的速度。
3.2 增量式旋转编码在单片机控制系统中的应用
如图5所示以AT89S51单片机作为控制器,我们可以将编码器的A相脉冲作为外部中断信号送入单片机的P3.2,B相脉冲作为一个输入信号送入单片机的任意输入口(如P3.0),编码器的检测各个状态利用LCD12864显示出来。
编程时需开放外部中断0,且为下降沿触发,在中断程序中判断P3.0口的信号,根据图2、3可以看出,当A相为下降沿且B相为高电平时,编码器此时为正转,计数变量加1计数;当A相为下降沿且B相为低电平时,编码器此时为反转,计数变量减1计数;由此可以判断出旋转方向以及旋转的圈数。另外为了计算出旋转的速度,可以在计数时开放定时器,计算出一定时间内脉冲的个数,然后根据此值计算出运动的速度。
收稿日期:2016-08-17
作者简介:王小祥(1980—),男,汉族,江苏东台人,工学学士学位,一级实习指导教师,主要从事自动控制方向研究教学。
