一种自动曝光机的图像定位方法的研究
2017-04-01徐福生


摘要:传统的曝光机对位系统都是通过手工进行对位,随着装备制造业的智能化发展,国内外曝光机厂商对曝光机的智能化需求显著提升并同时进行了研发[1]。本文提出了一种基于遗传算法的自动曝光机的菲林图像自动定位方法。并详细描述系统设计、硬件系统组成、定位模型和算法实现;通过一个实际的应用范例证明该方法具有定位精度高、速度快的特点。
关键词:曝光机 图像自动定位 方法研究
中图分类号:TP391.41 文献标识码:A 文章编号:1007-9416(2016)10-0073-02
1 引言
目前,日本ORC公司、台湾川宝科技、台湾志圣科技等公司研发的曝光机都实现了高精度、高解析度的自动化对位,自动化对位已经成为了曝光机的必要条件。对于国产的曝光机,图像定位方法是提高对位精度的最有效解决方法之一,本文研究提高计算速度的基于遗传算法的定位方法[2-3]。这种方法通过实验在国内的4CCD自动监视曝光机上,实现了很好的效果。在图像对位系统中,由于菲林的热缩性等性质,以及线路板的高精度、小孔径、多层化的需求,需要系统在2个方面进行优化设计:
(1)多孔协调对位。需对图像的四个角进行全面协调,提出一种多孔协调遗传算法的高速定位算法。(2)在对位时,需建立基本的运动控制及相关硬件条件。
2 自动曝光机基本原理
2.1 硬件架构图
自动曝光机自动定位算法的基本硬件架构和基本原理如图1所示。
控制系统通过运动控制算法来对所有的硬件进行运动控制。图像系统实时对位置信息进行精确计算,并把计算结果反馈给PC上位机进行判断。如此循环往复。
2.2 自动对位模型
曝光机在进行双面同时曝光时,需要对上下菲林片精确对位。因此,对于每个菲林片四个角都进行了标靶,通过四个角的对位来控制整张图的精确对位。模型图2所示。
对于四个角的成像图,分别定义黑白圆心坐标(i=1,2,3,4):BPoint(bxi,byi),WPoint(wxi,wyi);分别定义各自图像两圆心距离为:Di(i=1,2,3,4)、D2、D3、D4计算公式如下所示:
最后建立公式模型,表示第i个位置的第j(1<=j<=4)个角位置距离:
CCD采集图像的频率为30帧/秒,需要在30毫秒内快速计算出Di的值。计算最小的D值,其中的关键是快速计算出圆心点的坐标。本文研究了一种快速计算圆心坐标的方法。
3 算法实现
3.1Canny边缘检测
3.1.1 高斯滤波器平滑输入图像
平滑后的图像记fs(x,y)表示,f(x,y)表示图像数据:
3.1.2 计算图像幅值图像和角度图像
3.1.3 梯度幅值图像应用非最大抑制
梯度图像M(x,y)在局部最大值通常包含更宽的范围,通过非最大抑制细化那些边缘。对每个点为中心的3*3区域,进行非最大抑制,是非最大抑制的图像。
3.1.4 双阈值处理和连接分析来检测并连接边缘
低阈值和高阈值分别为、。,分别为进行阈值处理后图片。
阈值处理后,中的边缘可能会存在缝隙,通过如下步骤形成较长边缘:
(a)中定位下一个未被访问像素p;(b)中将弱像素标记为有效边缘像素,用8连通性连接到p;(c)如果中所有非零像素已被访问,调到步骤(d),否则返回步骤(a);(d)中未标记为边缘的所有像素置零。
3.2 快速圆心提取
4个摄像头采集了四幅图片,在进行Canny[4]边缘提取后,如图3所示:
图3中从外到内的圆半径分别记为R1、R2、R3、R4。采用切割法并通过圆心公式来计算粗略圆心。设定步频r,从左到右按步频切割图像,找到合适的切割点Up1(x,y)、Down1(x,y),开始计算圆心。两点距离需满足条件:距离大于R1/2,小于。用以排除轮廓间断的点和干扰点。两点需满足条件:距离大于R1/2,小于R1。用以排除那些轮廓间断的点和干扰点。
半径为R1的粗略圆心为R1(x1,y1):
进一步缩小区域,该区域是以R1(x,y)为圆心,半径为(R1-K)的圆,(其中k为实验值5),对该圆采用切割法来求得半径R2所在圆圆心R2(x2,y2)。依次求得圆心R3(x3,y3)、R4(x4,y4)。
3.3 精确圆心提取
经过快速圆心提取,已经求得粗略圆心R1(x1,y1)、R2(x2,y2)、R(x3,y3)、R4(x4,y4)。在实际的工业应用中,有用的数据是R2(x2,y2)、R4(x4,x4),根据R2和R4的圆心值来求得它们所在圆的精确圆心。以圆心R4(x4,y4)为矩形中心,长宽为Height、Width的矩形区域中,采用遗传算法找出精确圆心。
下面是遗传算法求解步骤:
(1)在搜索区域定义适应度函数,它为圆心(x0,y0)到区域轮廓(边缘)点的方差。
f值越小表示(x0,y0)越可能是圆心。给定种群规模N、交叉率Pc(0.4~0.99)、变异率Pm(0.0001~0.1)和代数t。
(2)随机产生U中的N个个体S1, S2, …, Sn,组成初始种群S={s1, s2, …, sN},置代数计数器t=1;对于每个个体的染色体x,y分别用二进制表示。例如:点(x1,y1)x1=01001011, y1=10110101;点(x2,y2)x2=01001111,y2=11011111.
(3)計算每个个体的适应度值F1,F2, …Fn。
(4)若终止条件满足,则取S中适应度最小的个体作为所求结果,算法结束。
(5)按选择概率P(xi)所决定的选中机会,每次从S中随机选定1个个体并将其染色体复制,共做N次,然后将复制所得的N个染色体组成群体S1。
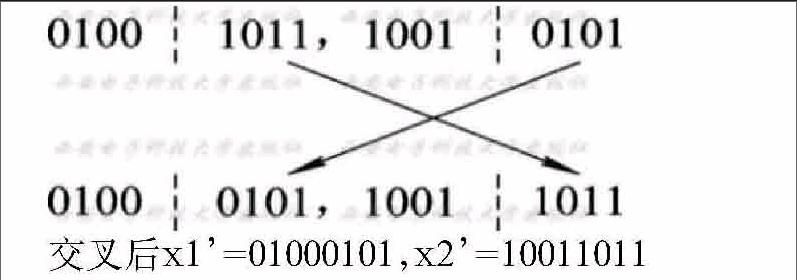
(6)按交叉率Pc所决定的参加交叉的染色体数c[5-6],从S1中随机确定c个染色体,配对进行交叉操作,并用产生的新染色体代替原染色体,得群体S2;交叉操作如下所示:x1=01001011,x2=10010101,交叉后四位
(7)按變异率Pm所决定的变异次数m,从S2中随机确定m个染色体,分别进行变异操作,并用产生的新染色体代替原染色体,得群体S3;将染色体的第六位(从右往左)进行变异(0变1,1变0)。
(8)将群体S3作为新一代种群,即用S3代替S,t = t+1,转步3。
4 应用范例
自动曝光机界面图4所示:
图4中显示的是demo程序采集的图像,并经过图像处理显示的界面。4个CCD分别对应菲林的四个角,遍历各个角的位置以选取最精确的位置。
试验设计:
(1)采集图像;(2)Canny边缘提取;(3)快速计算圆心,其中R1=110,R2=78,R3=65,R4=52,单位为像素,求得它们的圆心;(4)采用遗传算法计算精确圆心:区域长宽为Width=30,Height=30。
遗传算法参数值:初始种群数量N=6,交叉率Pc=0.8、变异率=0.01和代数T=0。实验结果,如表1所示。
此实验算法成功应用在曝光机中。
5 结语
本文设计了一种快速计算机圆心方法。通过遍历,确定了最高精度位置,从而实现了自动对位。该方法还需要进一步优化,提高应对实际复杂情况的抗干扰性。目前,是通过遍历所有位置来计算出所有的位置精度,以此来选出最优位置,这极大的增加了对位时间。需设计一种运动算法,根据D1、D2、D3、D4值来智能选择运动路径。
参考文献
[1]欧阳琴.大面积PCB投影扫描式激光曝光机的研制[D].广东工业大学,2011.
[2]Pi E, Qu L, Tang X, et al. Application of Genetic Algorithm to Predict Optimal Sowing Region and Timing for Kentucky Bluegrass in China[J]. PLoS One,2015(7).
[3]王银年.遗传算法的研究与应用[D].江南大学,2009.
[4]张志强,宋海生.应用Otsu改进Canny算子的图像边缘检测方法[J].计算机与数字工程,2014(01):122-128.
[5]张锦,李伟,费腾.交叉变异蚁群算法在VRP问题中的应用研究[J].计算机工程与应用,2009(34):201-203.
[6]李一鸣.基于交叉变异粒子群算法的复杂多任务制造云服务组合研究[D].重庆大学,2013.
收稿日期:2016-09-13
作者简介:徐福生(1988—),男,浙江杭州人,工学硕士在读,研究方向:嵌入式系统。
