高通量深海海水原位采样及分级过滤系统*
2017-03-31陈永华李晓龙刘庆奎李培海姜静波倪佐涛徐永平涂登志
陈永华 于 非 李晓龙① 宋 凯 刘庆奎 李培海姜静波 倪佐涛 徐永平 涂登志
(1. 中国科学院海洋研究所 青岛 266071; 2. 青岛科技大学 青岛 266061)
深海悬浮颗粒物(包括浮游微生物和悬浮泥沙等)的精确测量对研究海洋物质输运和水体要素特征具有重要意义。传统测量方法被认为是最准确的方法,通过现场取水(三点或六点法), 对采集水样抽滤、称重、计算悬浮颗粒物质量浓度, 但仅能得到某几层深度、较大时间间隔的悬浮颗粒物数据, 耗时耗力。现代测量方法利用光学、声学、密度、介电常数等传感器间接观测悬浮颗粒物浓度, 其特点是效率高、连续采集、可获得具有较高时空分辨率的悬浮颗粒物信息,但其测量精度较低, 而且这些观测手段都需要在使用前进行设备校准, 并受到适用深度限制(Raiet al,2015)。因此, 如何实现省时省力、全水深、多层水体悬浮颗粒物浓度的测量, 是目前海洋物质研究迫切需要解决的关键技术。
国内外针对水体原位采样技术的研究起始已久。1987年加拿大滑铁卢大学Johnson等(1987)研制了一种小口径的采样器, 用于收集地下水中的可挥发性有机物。2003年 Woods Hole海洋研究所和 Mclane公司联合研发了一种大体积水样抽滤采样系统(large volume water transfer system, WTS-LV)( Morrisonet al, 2000; Pfitschet al, 2003), 采用微孔过滤器原位过滤水体中的悬浮颗粒物。国内, 浙江大学和中南大学等单位先后开展了深海保真取样和在线检测设备的研发(陈毅章, 2004; 胡国庆, 2011; 刘玉静, 2011), 但多受限于深海泵和采样量的技术瓶颈。
中国科学院海洋研究所于2004年起开展深海水体原位采样技术研究, 针对国内外深海原位采样技术中存在的难点, 多次试验并成功进行深海采样工作。自2013年在中国科学院战略性先导科技专项研究经费的支持下, 开展深海原位抽滤取样技术的研究, 成功研制出适用于深海环境下分级过滤获取悬浮颗粒物的采样系统, 并多次应用于科考航次。本文第1部分详细介绍了高通量深海海水采样及分级过滤系统的结构及设计准则, 并将该系统的深度仪与国际上广泛应用的高精度传感器进行比测, 深海采样实验在文中第3部分进行讨论。该系统高通量和快速、便捷的采样特点, 为深海原位抽滤技术提供了技术基础。
1 系统结构
深海海水原位采样及分级过滤系统, 主要由抽滤控制及供电系统、深海泵、过滤舱、单向阀及流量计等组成(图 1), 可应用于海洋、湖泊、河流、水库等多种水体中进行浮游生物、痕量金属、沉积颗粒物等样品的采集工作。

表1 深海海水原位采样及分级过滤系统技术指标Tab.1 Technical parameters of The Large Volume Water Transfer and Graded Filtration System for in-Situ Sampling in Deep-sea

图1 深海海水原位采样及分级过滤系统结构示意图Fig.1 The sketch of the large volume water transfer and graded filtration system
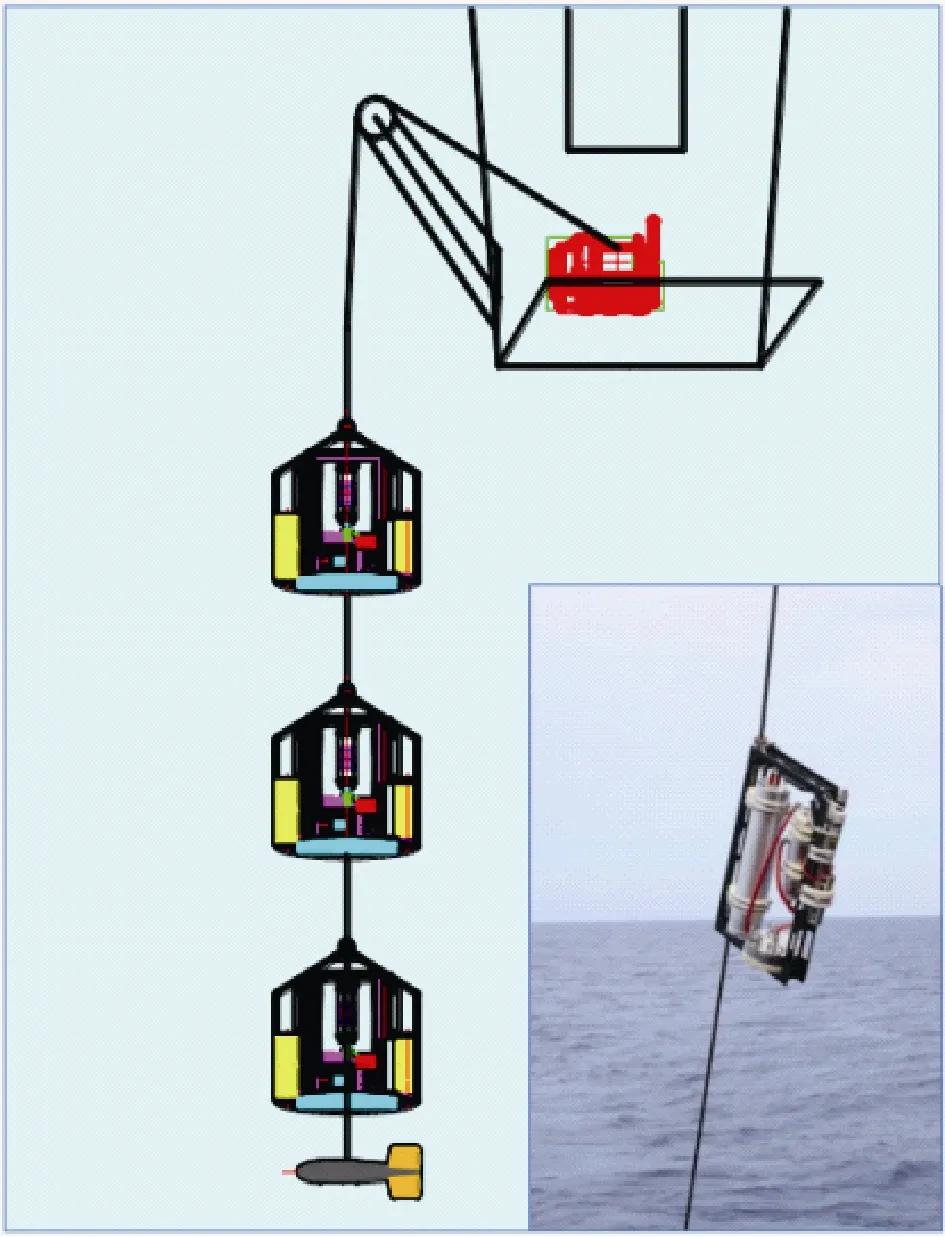
图2 立体采样示意图Fig.2 The multilayer sampling of the system
考虑实际海洋应用环境, 抽滤控制电路、电池以及压力传感器的采样电路均被密封在耐压大于40Mpa的壳体内, 压力传感器的探头与海水接触, 形成抽滤控制及供电系统, 可通过 RS-232串口通信方式和计算机连接设置, 通信波特率为9600Bd/s。控制电路通过时钟或深度判断, 触发深海泵工作, 泵的出水端与过滤舱体进水端连接, 形成水压均匀的流量已通过滤膜、且保证滤膜无破损。单向阀用于控制抽滤水体流向, 防止采样回流现象。采样水体的通量由流量计记录, 用以计算水体悬浮颗粒物的浓度。该系统的主要技术指标如表1所示, 其中过滤舱内设置多层不同孔径的滤膜, 抽滤水体依次通过滤膜的孔径由大至小变化, 从而获得不同粒径的悬浮物。另外,滤膜的类型可根据分析物质成分的要求而更换, 滤膜数量可以通过增加或减少滤膜支盘进行调整, 通常采用 3层滤膜结构(深海环境采用 0.22、1和 5μm孔径滤膜), 最多可安装5层滤膜, 相邻滤膜支盘间采用O型圈密封, 其间距为10mm。对于浑浊水体(如近岸海水), 应针对取样量进行抽滤时间限制, 以防止滤膜孔径堵塞。
该系统可以多套、同缆布放使用, 实现多个水层的同步、立体采样, 如图2所示。基于该系统的小型化和便捷性特点, 实施同步、立体采样有利于水体剖面悬浮物变化的分析。这种方式弥补了传统采样方式无法实现多水层、同步采样的缺陷, 可以为精确地获取水体物质变化特征提供保障。
抽滤控制及供电系统中, 可通过多路继电开关控制不同水质情况下海水流通速率和工作时长, 为了准确控制系统时钟的精确校时和计时, 系统设有外部时钟模块, 从而有效控制工作时长。通过多通道模数转换(analog to digital converter, ADC)采样模块实现多种海洋环境参数、以及抽滤系统姿态的测量,从而准确还原采样过程中的海洋环境变化。系统采用深度触发和时间触发两种工作模式。深度阈值触发模式下, 该系统能够在准确的深度范围内进行原位采样, 避免海流变化所产生的深度浮动问题。时间触发和深度触发模式的工作流程如图3所示。该系统的默认工作模式属于时间阈值模式, 无需启动时设定工作参数, 按照核心控制板上芯片的编写程序进行工作。时间触发和深度触发模式下, 分别设定启动触发时间和触发深度值, 作为启动深海泵的判断依据。时间触发模式下, 启动抽滤泵后, 工作时长递减至0时停止抽滤。深度触发模式下, 如果该系统受海流影响,出现所在深度浮动超出设定深度范围, 那么抽滤动作暂停, 等待系统采样深度值匹配成功后继续工作,并且抽滤动作进行的同时累加工作时间, 以达到所设定工作时长后停止采样。

图3 抽滤采样控制流程图Fig.3 Flow chart of the pumping and sampling control

图4 实验过程中原位采样系统与SeaBird 37-CTD测量深度的变化Fig.4 Depths measured by the in situ sampling system and SeaBird 37-CTD during the experiment
2 系统性能
深海海水原位采样及分级过滤系统中设有深度仪, 采用高精度、液压型压力传感器, 用于工作深度记录和深度阈值触发。在深度测量比对实验中, 利用校准后的SeaBird 37-CTD和本文系统进行压力测量,最终获取相应压力转换后的深度数据, 其最高采样频率分别为 1/6和 10Hz。压力实验采用深海型密封舱, 将SeaBird 37-CTD采样率设为1/6Hz, 原位采样系统的采样率调整为1Hz, 将两种设备的时钟调整一致。深度对比时选取采样时间一致的数据, 实验过程中记录的深度值变化如图4所示, 多次重复加压后泄压过程, 获取水体压力变化以模拟不同深度情况。图5中对深度数据进一步比较, 直线拟合为y=x-3.8, 深度残差在±10m内。300至3000m深度范围内均方根误差为 5.72%, 0至 300m深度范围内均方根误差19.70%。由于该系统压力传感器的满量程为 40Mpa,精度≤±0.25% FSO, 因此其测量误差为±10m, 这也带来浅水深时均方根误差较大的问题。从深度对比结果可以看到, 深海原位采样系统与校准后的 SeaBird 37-CTD在200至3000m水深范围内数据一致, 浅水情况下水深比对效果较差, 并在211m处产生奇异点,查验压力舱内结构发现, 这是由加压过程中水体颗粒物对压力探头的芯体产生撞击所致。因此, 对该系统的深度探头处进行了滤网改进, 以避除快速布放产生水体扰动、从而引起水中颗粒物的干扰。

图5 原位采样系统与SeaBird 37-CTD测量深度对比Fig.5 Depth comparison of the in-situ sampling system and SeaBird 37-CTD
目前, 国际上相同功能的设备为 WTS-LV采样器, 其主要功能部件是柱塞泵, 采用不锈钢及钛合金制成主体, 最大可承受 5500m水深压力。相对于WTS-LV, 深海海水原位采样及分级过滤系统在小型化的基础上, 实现了更多层级滤膜的采样和较大范围的流量控制, 两套原位抽滤系统的参数对比如表 2所示。针对此类海洋装备的实际应用需求, 该系统实现了所有部件的自主研制和深海测试及应用, 尤其是深海泵的研发与应用。

表2 原位抽滤系统参数对比Tab.2 Parameters Comparison of foreign and domestic in-situ systems
3 深海实验
在测试系统可靠性后, 深海海水原位采样及分级过滤系统被应用于多个科考航次。其中, 在“科学”号考察船的西太平洋考察应用航次中, 多次使用该系统进行海水原位采样, 并对抽滤工作模式、系统唤醒时长、采样时长等多种参数进行更改设置, 以实现不同海域情况中的采样可控性, 并获得多个样本进行海水菌落分离。图6为已成型的第一代深海海水原位采样及分级过滤系统, 以及其应用实验和样本照片。
本文所列举的样本采样站点位于热带深海区域(141.0°E, 8.1°N, 图 7), 采样深度为 3505m。采集海水滤纸片样品经富集稀释涂布平板后, 挑取生长起来的不同菌落进行划线分离。目前筛选到25株细菌, 测序构建进化树如图 8所示, 其中 9株细菌为Halomonassp., 6株为Pseudomonassp., 1株为Idiomarinasp., 2株细菌为Alteromonassp., 1株为Stenotrophomonassp., 1株为Ochrobactrumsp., 1株为Citricoccussp., 1株为Exiguobacteriumsp., 3株为Bacillussp.。此外我们从这些菌中筛选到7株细菌可降解去污剂SDS(Sodium Dodecyl Sulfate, 十二烷基硫酸钠), 其中 6株均为Pseudomonassp., 1株为Halomonassp.。经分离的所有菌株均为海洋常见菌属,其中菌株较多的Halomonassp.为嗜盐菌, 多在盐度较高的海域生长(李春芳, 2015), 而本文采样点位于热带西太平洋区域, 高温高盐, 非常适宜Halomonassp.生长。

图6 系统实验及采样照片Fig.6 Photos of the system and sampling experiment

图7 采样站点Fig.7 A sampling site of the system
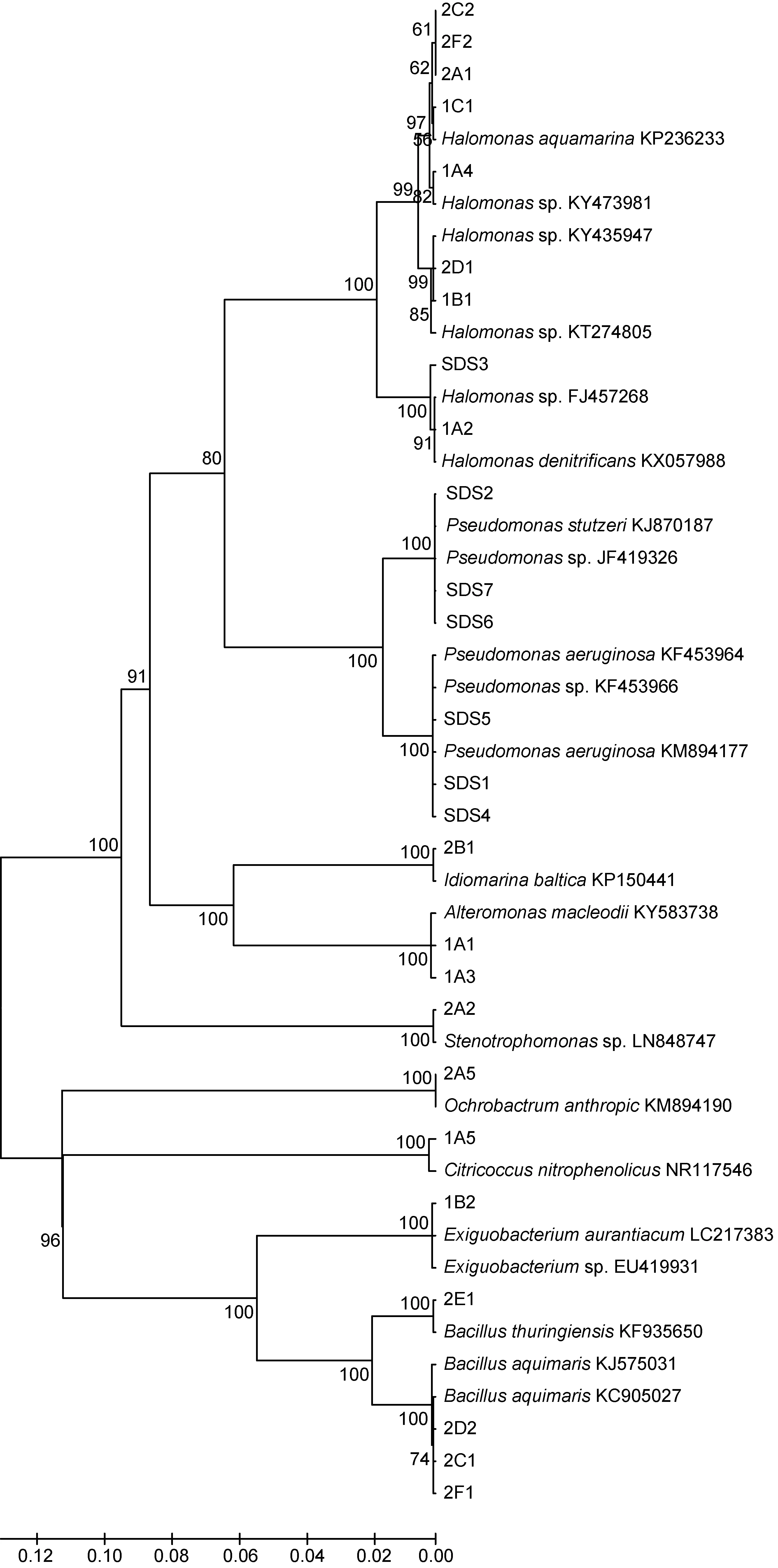
图8 样本菌落进化树Fig.8 The evolutionary tree of the bacterial colony samples
4 结论
高通量深海海水原位采样及分级过滤系统现已研制完成, 并进行了科考应用, 其深度测量数据与应用广泛的 SeaBird 37-CTD所测深度一致, 确保了系统应用时不同水深采样的准确性。目前深海应用实验表明, 该采样及分级过滤系统能够成功应用于海洋科考航次, 获取样本符合采样海域的生态及物理特性。由于实验室压力测试条件有限, 当前系统耐压仅为40Mpa, 而在下一步工作中, 将设计耐压6000m的各部分舱体并进行实验。
刘玉静, 2011. 深海微生物量原位在线自动检测系统设计. 杭
州: 浙江大学硕士学位论文, 50—51
李春芳, 2015. 中度嗜盐嗜碱菌Halomonassp. 19—A中相关Na+/H+逆向转运蛋白基因的克隆与功能研究. 济南: 山东大学硕士学位论文, 12—14
陈毅章, 2004. 深海悬浮物浓缩保真取样器保压性能及薄膜过流能力研究. 长沙: 中南大学硕士学位论文, 12—15
胡国庆, 2011. 深海海水柱塞往复泵的研制. 杭州: 浙江大学硕士学位论文, 7—8
Johnson R L, Pankow J F, Cherry J A, 1987. Design of a ground-water sampler for collecting volatile organics and dissolved gases in small-diameter wells. Groundwater, 25(4):448—454
Morrison A T, Billings J D, Doherty K W, 2000. The McLane WTS-LV: a large volume, high accuracy, oceanographic sampling pump. In: OCEANS 2000 MTS/IEEE Conference and Exhibition. Providence, RI, USA, USA: IEEE, 2:847—852
Pfitsch D W, Morrison A T, 2003. Performance of large volume water transfer systems during in-situ water sampling. In:Proceedings of Oceans 2003. San Diego, CA, USA: IEEE, 4:2242—2246
Rai A K, Kumar A, 2015. Continuous measurement of suspended sediment concentration: Technological advancement and future outlook. Measurement, 76: 209—227
