机场场面监视下的静态飞机目标检测算法
2017-03-31崔秀敏朱向荣
崔秀敏+朱向荣

摘 要:针对简单背景与复杂背景,单目标与多目标等多种情况下的飞机目标,采用大律法、改进的自适应区域生长法对目标进行分割。选取目标的几何特征作为表示飞机目标的特征向量,使用MATLAB软件对飞机目标进行检测,统计目标数量,实现对无遮挡飞机的有效检测。
关键词:飞机检测 目标分割 区域生长 几何特征
中图分类号:TP391 文献标识码: 文章编号:1672-3791(2016)11(b)-0007-02
目标识别是计算机视觉领域的核心问题之一,而飞机目标的识别又是它在军事领域和民用领域里的一项重要应用。国内外学者在目标识别方面已经做了大量研究,每种目标识别方法都各有利弊,又都有一定的适用范围。因此研究飞机目标的识别,针对特定环境探索特定的目标识别算法是十分必要的。该文针对机场俯视图这一特定类型,提出了一种基于局部灰度特征的自适应区域生长法的识别方法。
1 图像预处理与分割
图像预处理是目标识别过程中一个必不可少的基本环节。为了对飞机目标进行提取,首先对图像进行平滑预处理,再分割图像目标。
1.1 图像预处理
在图像采集中不可避免地会产生图像噪声,而噪声直接影响到对目标边缘轮廓的准确提取。该文采用中值滤波的方法对图像进行平滑处理。中值滤波在降噪的同时可以保护图像尖锐的边缘。图1是受污染的图像,图2是经过中值滤波平滑处理后的图像,可以看出中值滤波可以在去除噪声的同时比较有效地保留边缘信息。
1.2 图像分割
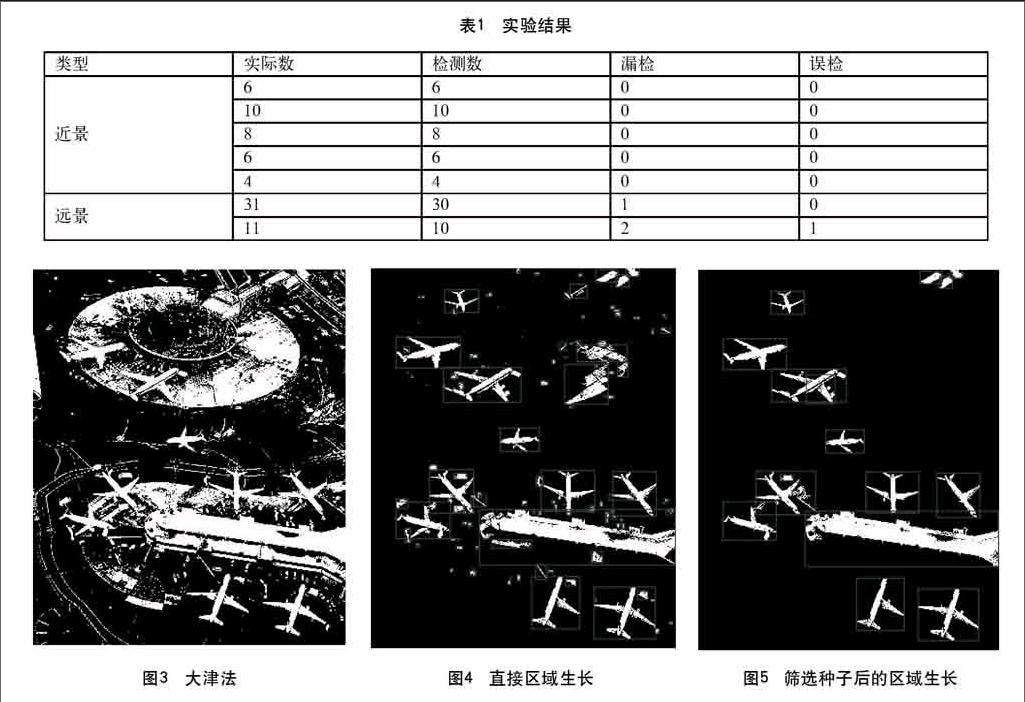
图像分割就是将所需要的目标部分从图像的背景中分离出来,进行后续的研究。由于民用机场飞机以白色居多,光照条件下,白飞机,尤其是飞机机身的亮度很高,因此选择利用区域生长法,以图像中亮度较高的点为种子点,选取一定的生长规则进行区域生长。由图3、图4、图5可以看到,相比于大津法和直接进行区域生长的方法,先筛选种子再进行局部自适应区域生长,既可以从复杂背景中提取出目标,又可以有效减少干扰目标。潜在的飞机目标都得到了有效提取,同时图片中其他亮度较高的建筑物等也被提取出来,这有待于在下面的特征提取环节中再进行进一步识别。
2 目标提取
当完成了目标区域的分割后,就可以进行形状的匹配和目标的识别了。
2.1 轮廓矩形尺寸
对于从相同高度拍摄的机场照片,飞机尺寸应不会超出一定范围,面积过大或过小的被认为不是目标。
2.2 最小外接矩形长短轴比
对于以相同俯仰角下拍摄的机场照片,飞机的身长与翼展的比例不会超出一定的范围,其轮廓所在矩形区域的长宽比也保持在一个大致的范围,可以作为排除干扰目标的依据。
2.3 目标复杂度
目标复杂度定义为目标轮廓的像素点个数与整个目标的像素点个数的比值。目标轮廓的像素点个数就等于目标轮廓曲线的周长,而整个目标的像素点数即为目标区域的面积。前文已经讨论了边缘检测以及边界跟踪,可得到单像素的目标的轮廓边界曲线,然后对边界像素个数进行统计,可得到周长。
2.4 多边形凹缺
飞机目标可近似为一个凹多边形,因此可利用多边形的凹缺特征作为目标判据。求取目标的最小外接凸多边形,即凸壳,再与原目标图像相减得到多边形凹缺。飞机目标一般具有4个明显的凹缺,并且呈对称分布。这是飞机目标区别于机场环境中其他目标的一个典型几何特征。
3 实验结果
通过MATLAB编程,实现上文所述算法,并使用多幅機场图像进行飞机目标提取,对算法进行验证,结果如表1所示。
实验表明,该算法对无遮挡飞机目标有较好的识别效果。
4 结语
该文针对机场场面静态飞机目标的跟踪和定位,提出了采用大律法、改进的自适应区域生长法。选取目标轮廓矩形尺寸、最小外接矩形长短轴比、紧凑度、复杂度和最小外接凸多边形的凹缺对称性等目标的几何特征作为表示飞机目标的特征向量。通过使用MATLAB软件对飞机目标进行检测,统计目标数量,实现对无遮挡飞机的有效检测。实验表明,该算法对无遮挡飞机目标有较好的识别效果,实际应用中效果很好。
参考文献
[1]刘怀愚,李璟,洪留荣,等.利用局部特征的子空间车辆识别算法[J].计算机工程与应用,2010,46(30):156-158,180.
[2](美)冈萨雷斯.数字图像处理[M].2版.北京:电子工业出版社,2007.
[3]杨四海,陈锻生,谢维波,等.图像目标外接多边形及凸壳的一种构造方法[J].计算机辅助设计与图形学学报,2007,19(10):1263-1268.
[4]刘军,齐华,汪振飞,等.基于边缘区域增长法的飞机图像目标分割研究[J].飞行力学,2008,26(2):93-96.
