新型无人机机载机电管理计算机研究与设计
2017-03-31孙沛郭警涛
孙沛+郭警涛

摘 要:针对无人机机电系统对稳定性和灵活性越来越高的要求,该文通过对机电管理计算机总体方案的分析和研究,依据模块化设计思路,分别对机电管理计算机的硬件平台和软件进行了设计,阐述了硬件电路和软件流程的设计过程,通过在某无人机上的实践应用证明,该机电管理计算机具有高精度、高可靠性的优点,且易于升级和功能扩展,具有一定的工程应用价值。
关键词:无人机 机电管理计算机 飞行器管理计算机 电磁干扰 外场可更换部件
中图分类号:V243 文献标识码: 文章编号:1672-3791(2016)11(b)-0005-02
無人机是一种由动力驱动、机上无人驾驶、可重复使用的航空器的简称。它以其重量轻、体积小、造价低、隐蔽性好的性能特点, 更适于完成危险性大、机动性高的那些普通飞机难以完成的任务, 越来越广泛应用于军需民用的各个方面。
UMC(Utility Management Computer/机电管理计算机)是无人机系统的重要组成部分,实现对无人机整个机电系统的状态监测与控制,其中UMC完成信息采集、信息处理、信息输出的功能。UMC的性能要求做到快速、实时、准确,通常采用基于嵌入式系统的实现方案,核心是嵌入式处理器,功能完善的机电管理计算机已成为现代飞机的标志[1-2]。
该文通过对机电管理计算机的总体方案设计、硬件设计和软件设计,实现了无人机机电管理系统对于高精度、高可靠性和实时性的要求。
1 UMC总体方案
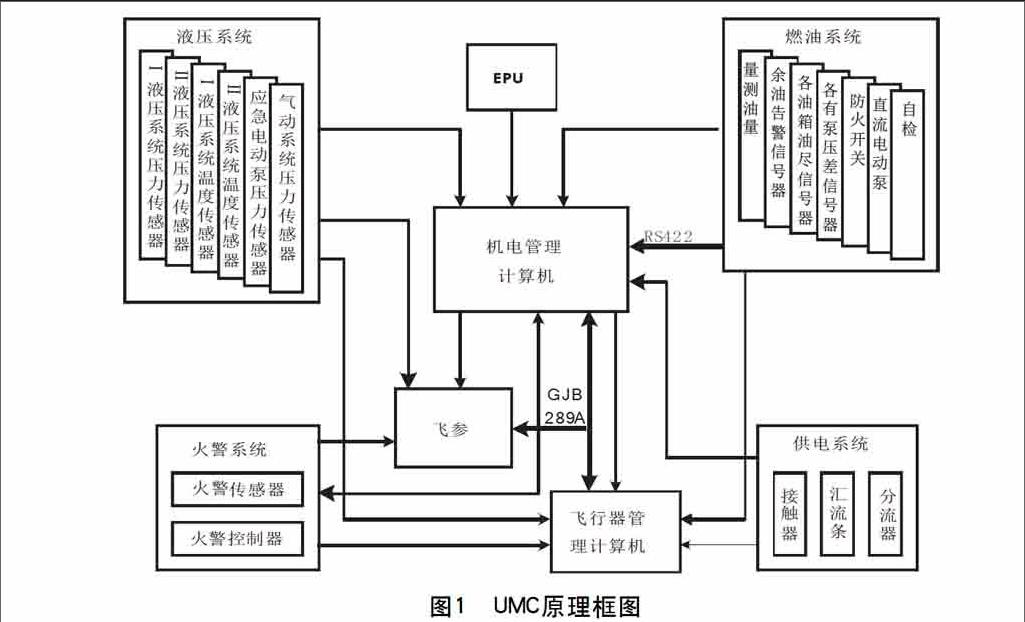
UMC是一个外场可更换部件(LRU),对液压系统、火警系统、燃油系统、供电系统、EPU等系统进行实时监控,并将这些数据经过处理后通过1553B总线传给VMC(Vehicle Management Computer/飞行器管理计算机)和飞参。具体的UMC原理如图1所示。
2 UMC硬件设计
UMC硬件设计遵循模块化设计原则,主要包括数据处理模块、总线接口模块、串行通讯模块、离散量采集模块、离散量驱动模块、模拟量采集模块[3-4]。硬件结构框图如图2所示。
2.1 数据处理模块设计
数据处理模块完成对UMC的控制和管理、与其他功能模块进行信息交换并完成解算和控制等任务,实现与VMC系统的数据传递功能,完成UMC数据的记录和输出等功能。数据处理模块由中央处理器CPU、程序存储器、非易失存贮器、数据存储器、中断控制器、计时器、看门狗电路、自测试电路及控制电路等组成。数据处理模块和其他模块间握手方法为查询、中断或无条件读写。具有两路用于软件调试的RS-232接口。
2.2 总线接口模块设计
总线接口模块主要完成UMC与VMC和飞参之间的数据通讯,总线接口模块的功能电路主要由通信控制器、总线协议处理器、双端口存储器、主机接口电路、实时时钟、看门狗计时器、双通道收发电路组成。其中,通信控制器主要完成总线协议处理器的初始化、多消息组织及传输管理工作,并响应主机命令,负责与主机进行信息交换等。通信控制器具有16位的微处理器、8K×16 位的EPROM及8K×16位的RAM。通信控制器具有中断处理功能;总线协议处理器实现数据链路层的全部功能;双端口存储器容量为8 kB,用于存放从多路传输数据总线接收或发送到多路传输数据总线上的所有消息和存放协议执行过程中所使用的通信命令表。
2.3 串行通讯模块设计
串行通讯模块用于完成RS-422A异步串行数据通信接口。异步串行数据通信接口传输率:9 600 bps。在串行通讯模块中包括缓冲驱动电路,译码控制电路,时钟电路,串行通信电路。串行通信控制电路由88C681芯片构成。88C681与CPU之间的握手方式为中断方式。该电路的主要功能是完成数据通信过程信息的编码格式及数据串/并转换等。时钟电路由晶体振荡器、驱动电路组成,用于产生88C681的工作时钟。采用3.686 4 MHz的晶体振荡器,由54HCT244进行驱动。接收和发送电路由MAX488、MAX483芯片分别构成RS422的全双工/半双工通信链路。保护电路由电阻、电容和稳压网络组成,可防止电磁干扰。
2.4 离散量采集模块设计
离散量模块主要完成离散量信号的输入及变换。通过设计激励电路、状态回读电路实现测试功能。离散量模块主要由EMI电路、电平转换电路、缓冲驱动电路、译码控制电路、BIT支持电路等组成。BIT电路按CPU要求执行自测试。译码电路控制离散量模块和CPU 的数据传送和指令译码,控制离散量模块的动作。当上电复位时,从子系统来的信号经EMI滤波,并经电平变换电路变换成一个TTL兼容电平,经数据缓冲器,等待CPU读取,数据传送方式为无条件传送,供CPU处理。
2.5 模拟量采集模块设计
模拟量模块主要完成模拟量信号的输入及变换等功能。离散量模块主要由LBE总线接口电路、A/D转换电路接口电路、模拟多路开关、隔离/滤波放大电路、译码控制电路、译码/控制电路、自测试支持电路。
3 UMC软件设计
UMC软件主要完成对供电系统、燃油系统、液压系统、火警系统、EPU系统的实时监测与控制,并将监测到的机电系统状态信息上传VMC和飞参,并接受VMC的控制指令。软件的设计重点主要是任务的划分及优先级的设定,该系统选用国产天脉操作系统,以充分满足UMC实时通讯的要求。
UMC软件的工作流程如图3所示, UMC加电启动后执行主程序进行自检测,若有错误,则报UMC自身故障,若成功,则创建主任务并执行,包括数据的采集和处理、数据的控制解算、总线通讯、周期BIT测试等,最终完成对机电系统的实时监测和管理。
4 结语
该文研究了典型机电管理计算机的设计架构与软硬件实现,并将该机电管理计算机应用于某无人机机电管理系统。经过系统联试试验,机电管理计算机稳定可靠,实践结果表明,该设计方案合理可行,能够满足无人机机电管理计算机对于高精度和实时性的要求。
参考文献
[1]Soumelidis A,Gaspar P,Regula G,et al.Control of an experiment-tal mini quad-rotor UAV[C]//Conference on Control and Automation.2008.
[2]冯琦,周德云.军用无人机发展趋势[J].电光与控制,2003,10(1):9-13.
[3]董延军,刘莹,张晓斌.1553B总线测控系统的设计与实现[J].计算机测量与控制,2008,16(11):1578-1581.
[4]周文霞,胡志忠,肖前贵,等.基于ARM的某型无人机飞控计算机设计[J].计算机测量与控制,2009,17(7):1286-1288.
[5]苏连栋.无人作战飞机任务系统设计关键技术[J].飞机设计,2008,28(6):66-68.
