吸气式高超声速飞行器巡航段突防弹道规划
2017-03-31符文星
郭 行,符文星,付 斌,陈 康,闫 杰
(西北工业大学航天学院,西安710072)
吸气式高超声速飞行器巡航段突防弹道规划
郭 行,符文星,付 斌,陈 康,闫 杰
(西北工业大学航天学院,西安710072)
针对吸气式高超声速飞行器巡航段面临的终端碰撞角约束中制导策略,在合理假设的基础上,建立了巡航段攻防对抗数学模型,然后以特定的双方终端弹道角偏差为约束,并出于突防效率考虑以终端横纵向位置偏差最大和控制能量最小为性能指标,基于优化模型预测静态规划算法,在满足控制输入饱和限制情况下得出了飞行器的突防弹道,并且优化算法通过对控制输入和期望终端状态偏差权重矩阵的自适应调整,不仅可以保证在飞行器控制输入饱和限制情况下的收敛速度,而且有效增强了不同初始设置和约束情况下的收敛鲁棒性。
吸气式高超声速飞行器;巡航段突防;攻防对抗;优化模型预测静态规划
0 引 言
高超声速技术是世界武器装备史上的一个重要里程碑,它极大地丰富临近空间攻防对抗的内容[1-2]。吸气式高超声速飞行器突防呈现出新特点[1-2]:飞行器在临近空间飞行,可充分利用气动力进行机动,但发动机与气动力的强耦合限制了飞行器的最大可用攻角[3-4],具备“机动范围广,机动能力弱”的突防特点;飞行速度在5Ma以上,具备一定速度优势,目前面临的主要拦截方式为逆轨拦截[5];超高速飞行过程中产生强烈热辐射,使其极易被天基红外系统探测。
针对高速机动性目标的拦截问题,拦截策略分为中制导和末制导[6-7]。中制导段,提出具备终端角度约束的最优/次优中制导率,结合预测命中点等,依据非线性最优控制理论、模型预测控制理论等得出理想的中制导律[7-9]。末制导段,拦截策略依据微分对策理论、鲁棒控制理论、运动伪装理论等来完成在不同情况下的高精度拦截[10-13]。
结合前文对高超声速飞行器突防特点和相应拦截策略分析,高超声速飞行器虽然具备速度优势,但最大可用过载则处于劣势,所以在逆轨拦截态势下,飞行器将很难突防。因而本文提出在拦截中段就进行突防弹道规划,形成更有利的拦截末段突防形势,即为:以特定的拦截中段终端的双方弹道角偏差为约束,打破拦截方逆轨拦截不利态势;出于突防效能考虑,以终端横纵向位置偏差最大和能量最少为性能指标,以尽可能小的能量消耗来产生尽可能大的横纵向偏差。
在弹道规划方面,方群等[14]采用共轭梯度法有效设计了高超声速飞行器滑翔弹道,但此间接法仍依赖初始控制猜想;李惠峰等[15]在改进数学模型的基础上进行高超声速飞行器上升段轨迹优化,但融合了有限差分法、改进牛顿法以及同伦算法使其较为复杂;明超等[16]针对吸气式超声速导弹的多约束强耦合特点,利用hp自适应伪谱法设计爬升弹道,但需要设定判据来自主判别增加多项式阶数或重新进行网格划分。在具有终端约束的弹道规划方面,模型预测静态规划因收敛速度快、精度高以及算法简便获得大量应用[8,17-20]。但当面临控制输入饱和限制,性能指标包含终端状态最优时,MPSP算法没有相应解决方法。本文在突防策略基础上,针对以上MPSP局限,结合所建立的攻防对抗模型,提出了原始MPSP面临性能指标中包含终端状态、控制量饱和限制、期望终端状态约束苛刻及初始设置不适当情况下的优化改进策略,通过对控制输入和终端状态偏差权重矩阵的自适应调整,综合权衡算法收敛鲁棒性和收敛速度,并保持算法简便,最终圆满实现高超声速飞行器巡航段的突防弹道规划。
1 攻防对抗模型
三维空间的攻防对抗关系及相关角度定义如图1所示。图中:(Vi,Ve)分别拦截弹和突防弹的速度矢量,r为相对位置关系矢量,(γi,ψi)为拦截弹弹道倾角和偏角,(γe,ψe)为突防弹的弹道倾角和弹道偏角,(qz,qy)为视线高低角和方位角。
针对高超声速飞行器此类目标,拦截中段通常采取带有终端碰撞角约束的中制导策略(终端是指中末端交接班时刻),常用制导律为弹道成型补偿比例导引法,并且补偿系数随着剩余时间减小而增大,使得弹道成型效果在终端最大。同时假设拦截弹的速度在拦截中段存在推力时逐渐增加。系统数学模型可以表示为
(1)

(2)


表1 飞行器基本参数
飞行器控制输入u=(α,μ,δT)T,所受约束为
(3)
2 优化模型预测静态规划算法
2.1 原始MPSP算法概述
假设系统数学模型和期望终端状态为
(4)
系统期望的终端状态为
(5)
最优问题的性能指标为控制输入能量最少,
(6)
式中:Rk为正定权重矩阵。最优控制[10]为:
(7)
2.2 包含终端状态最优的MPSP算法
性能指标包含终端状态最优时为
(8)
式中:Q为非负定矩阵。其处理方式有两种:
(1)复合型性能指标
该处理方式即同时保留性能指标形式并引入拉格朗日乘子,则有
(9)
通过变分法并结合MPSP的推导过程[10],有
(11)
在上式右半部分引入系数η作为迭代公式
(12)
(2)转化型性能指标
该处理方式将式(8)转化为
(13)
式中:h为系统离散化的步长。控制量偏差Δuk产生的性能指标偏差为
(14)
(15)
同时结合初始MPSP推导过程[10],可得
(16)
最终可得到控制量迭代式为
(17)
2.3 控制量饱和限制的MPSP优化策略
原始MPSP算法中,当终端状态偏差满足精度要求但不满足饱和限制时,如果直接进行饱和限制处理,则接下来的迭代会陷入上述死循环,最终使算法不收敛。为了保持算法简便以及保证收敛速度,本文提出在原始MPSP算法收敛后再根据饱和限制更正控制量同时自适应放大权重矩阵Rk的优化策略,从而使更新出的控制量减小,促进下一次达到收敛时更可能满足饱和限制。
2.4 期望终端状态约束苛刻、仿真初始设置不适当时MPSP优化策略
研究发现,控制量权重矩阵Rk对于MPSP算法的收敛鲁棒性有很大影响,设置不合理会导致无法得到局部最优解。此外,本文引入终端状态偏差ΔyN权重矩阵W,通过其自适应减小来调节各变量的收敛速度。优化算法最终框图见图2。
3 突防弹道规划解算及优化算法验证
本文将模型(1)转化为对距离x求导,从而转化为有限“时间”内最优控制问题,离散模型为式(18),仿真条件如表2所示。(h为离散化补偿,k为当前步数,N为总步数。)

表2 相关仿真参数值
3.1 控制量饱和限制情况下优化算法验证
根据表3及终端偏差表达式、精度要求式,本文以ΔyN(1)为例给出饱和限制下收敛特性对比。

表3 饱和限制下算法验证期望终端状态条件
(18)
(19)
(20)
通过仿真结果可得如下结论:
(1)原始MPSP算法最终收敛结果有较大偏差,无法满足精度要求;
(2)优化MPSP算法具有极快的收敛速度并能达到精度要求。这时,控制量权重矩阵Rk进行了自适应调整。
(21)
3.2 期望终端状态约束苛刻、仿真初始化不适当时优化算法验证
期望终端状态见表4,对于权重矩阵W,初值为单位阵I3×3。选取初值Rk=I3×3。

表4 算法收敛鲁棒性验证期望终端状态条件
权重矩阵Rk和W的变化分别为
(22)
(23)
根据以上仿真结果可以得出以下结论:
(1)优化算法改善不收敛情况,但收敛速度变慢,原因是Rk自适应调整要兼顾收敛速度、稳定性和饱和限制因素;
(2)权重矩阵W能增强算法的稳定性,由于它并没有充分利用终端状态偏差,会降低收敛速度,然而却有助于算法收敛。
3.3 高超声速飞行器突防弹道规划仿真
弹道期望终端约束见表5,性能指标见式,初始假设见表2,收敛精度见式。
由于本文中存在着
(24)
所以式(17)与原始MPSP相同,因而采用式(12)进行迭代。
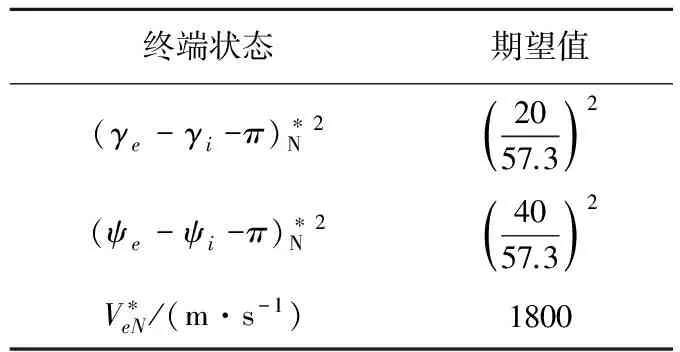
表5 突防弹道实现所需期望终端条件
通过优化MPSP算法,突防弹道规划进行95次迭代后收敛,仿真结果如图5~9所示。

表6 突防弹道规划仿真收敛结果
Rk=
(25)
(26)
由以上仿真结果可以得出以下结论:
(1)突防策略成功打破拦截方期望的逆轨拦截态势,见图5;
(2)优化MPSP算法能够有效收敛,如图6、图7所示;相关矩阵的自适应调整增强了算法收敛鲁棒性;
(3)控制输入指令体现出能量最小的性能指标,如图8、图9所示。
为进一步验证高超声速飞行器突防弹道解算鲁棒性,本文又针对表7中期望条件对飞行器气动力系数进行了随机拉偏仿真。

表7 引入气动系数拉偏后突防弹道期望终端约束条件
仿真结果如图10~12和表8所示。其中图10给出了四种期望终端条件下的攻防双方弹道曲线,图11给出了四种期望终端条件下的弹道倾角和弹道偏角随时间变化曲线,图12给出了四种期望终端条件下的突防速度变化随时间变化曲线。表8给出了四种期望终端条件下攻防双方在终端时刻的横纵向距离偏差。
根据仿真结果可得,本文基于优化MPSP算法的吸气式高超声速飞行器巡航段突防弹道规划方法能够适应飞行器气动力系数的不确定性,在不同的期望终端状态约束下均能较好的完成突防弹道规划任务,且具有较强的鲁棒性。

表8 横纵向距离偏差仿真结果
4 结 论
本文仔细分析了吸气式高超声速飞行器巡航段突防时攻防对抗形势,创新地提出在巡航段的突防策略,它以特定的双方终端弹道角偏差为约束,以横纵向位置偏差最大和控制输入能量最小为性能指标。同时,鉴于MPSP算法具有收敛速度快、精度高、算法简便特点,本文将攻防对抗数学模型离散化并优化MPSP算法,通过对算法中相关矩阵或参数的自适应调整不仅保持原始算法的简便和收敛速度,并有效增强算法收敛鲁棒性,使其在苛刻终端状态约束、存在输入控制饱和限制和仿真设置不适当的情况下仍能有效收敛。同时,针对实际过程中可能存在的飞行器气动系数不确定性和期望终端状态约束多变等情况时,本文通过拉偏仿真验证了基于优化MPSP算法的弹道规划方法具有较强的应用鲁棒性,能够有效解决此类弹道规划问题,为将来高超声速飞行器的突防提供了新的思路与借鉴。
[1] 党爱国,郭彦朋,王坤.国外高超声速武器发展综述[J].飞航导弹,2013,2(2):12-19. [DangAi-guo,GuoYan-peng,WangKun.Overviewonforeignhypersonicweapons’development[J].AerodynamicMissileJournal, 2013,2(2): 12-19.]
[2] 李国忠,于廷臣,赖正华.美国X-51A高超声速飞行器的发展与思考[J].飞航导弹,2014,1(5):5-8. [LiGuo-zhong,YuTing-chen,LaiZheng-hua.InspirationofAmericanX-51Ahypersonicvehicle’sdevelopment[J].AerodynamicMissileJournal, 2014,1(5): 5-8.]
[3]BolenderMA,DomanDB.Nonlinearlongitudinaldynamicalmodelofanair-breathinghypersonicvehicle[J].JournalofSpaceandRockets, 2007, 44 (2):374-387.
[4]DalleD,FrendreisS,DriscollJ,etal.Hypersonicvehicleflightdynamicswithcoupledaerodynamicsandreduced-orderpropulsivemodels[C].AIAAAtmosphericFlightMechanicsConference,Toronto,OntarioCanada,August2-5, 2010.
[5] 孙磊,黄可西,常晓飞,等.临近空间高超声速巡航导弹拦截问题研究[J].西北工业大学学报,2015,33(4): 615-620. [SunLei,HuangKe-xi,ChangXiao-fei,etal.Researchinginterceptionofnear-spacehypersoniccruisemissile[J].JournalofNorthwesternPolytechnicalUniversity, 2015, 33(4): 615-620.]
[6]ChengVHL,GuptaNK.Advancedmidcourseguidanceforair-to-airmissiles[J].JournalofGuidance, 1986, 9(2): 135-142.
[7]IndigN,Ben-AsherJZ,FarberN.Near-optimalspatialmidcourseguidancelawwithanangularconstraint[J].JournalofGuidance,ControlandDynamics, 2014, 37(1): 214-223.
[8]DwivediPN,BhattacharyaA,PadhiR.Suboptimalmidcourseguidanceofinterceptorsforhigh-speedtargetswithalignmentangleconstraint[J].JournalofGuidance,ControlandDynamics, 2014, 34(3): 860-877.
[9]ShafermanS,ShimaT.Cooperativeoptimalguidancelawsforimposingarelativeinterceptangle[J].JournalofGuidance,ControlandDynamics, 2015, 38(8): 1395-1408.
[10]ShafermanV,ShimaT.Linearquadraticdifferentialgamesguidancelawforimposingaterminalinterceptangle[C].AIAAGuidance,NavigationandControlConferenceandExhibit,Honolulu,HawaiiUSA,August18-21, 2008.
[11]BardhanR,GhoseD.AnSDREbaseddifferentialgameapproachformaneuveringtargetinterception[C].AIAAGuidance,Navigation,andControlConference,Kissimmee,FloridaUSA,January5-9, 2015.
[12]KumarS.R,RaoS,GhoseD.Nonsingularterminalslidingmodeguidancewithimpactangleconstraints[J].JournalofGuidance,ControlandDynamics, 2014, 37(4): 1114-1130.
[13] 高长生,李涧青,荆武兴.拦截机动目标的运动伪装制导律[J].宇航学报,2016,36(6): 737-743. [GaoChang-sheng,LiJian-qing,JingWu-xing.Motioncamouflagestrategyguidancelawforinterceptingmaneuveringtarget[J].JournalofAstronautics, 2016, 37(6): 737-743.]
[14] 方群,李新三.临近空间高超声速无动力滑翔飞行器最优轨迹设计及制导研究[J].宇航学报,2008,29(5): 1485-1491. [FangQun,LiXin-san.Optimaltrajectoryplanningandguidanceresearchforhypersonicunpoweredgliderinnearspace[J].JournalofAstronautics, 2008, 29(5): 1485-1491.]
[15] 李惠峰,李昭莹.高超声速飞行器上升段最优制导间接法研究[J].宇航学报,2011,32(2): 297-302. [LiHui-feng,LiZhao-ying.Indirectmethodofoptimalascentguidanceforhypersonicvehicle[J].JournalofAstronautics, 2011, 32(2): 297-302.]
[16] 明超,孙瑞胜,白宏阳,等.吸气式超声速导弹爬升段多约束轨迹优化[J].宇航学报,2016,37(9): 1063-1071. [MingChao,SunRui-sheng,BaiHong-yang,etal.Climbtrajectoryoptimizationwithmultipleconstraintsforair-breathingsupersonicmissile[J].JournalofAstronautics, 2016, 37(9): 1063-1071.]
[17]HalbeO,MathavarajS,PadhiR.Energybasedsuboptimalreentryguidanceofareusablelaunchvehicleusingmodelpredictivestaticprogramming[C].AIAAGuidance,Navigation,andControlConference,Toronto,OntarioCanada,August2-5, 2010.
[18]OzaHB,PadhiR.Impact-angle-constrainedsuboptimalmodelpredictivestaticprogrammingguidanceofair-to-groundmissiles[J].JournalofGuidance,ControlandDynamics, 2012, 35(1): 153-164.
[19]MaityA,OzaHB,PadhiR.Generalizedmodelpredictivestaticprogrammingandangle-constrainedguidanceofair-to-groundmissiles[J].JournalofGuidance,ControlandDynamics, 2014, 37(6): 1897-1913.
[20]HalbeO,RajaRG,PadhiR.Robustreentryguidanceofareusablelaunchvehicleusingmodelpredictivestaticprogramming[J].JournalofGuidance,ControlandDynamics, 2014, 37(1): 134-148.
通信地址:陕西省西安市友谊西路127号(710072)
电话:15353745647
E-mail:jsguoh@mail.nwpu.edu.cn
(编辑:张宇平)
Penetration Trajectory Programming for Air-Breathing Hypersonic Vehicles During the Cruise Phase
GUO Hang, FU Wen-xing, FU Bin, CHEN Kang, YAN Jie
(School of Astronautics, Northwestern Polytechnical University, Xi’an 710072, China)
With regarding to the midcourse interception strategy with terminal impact angle constraint that the air-breathing hypersonic vehicles encounter during the cruise phase, the mathematical model of attack and defense countermeasure is established on the basis of the appropriate hypothesis on bilateral strategies and then with specified bilateral terminal trajectory angle errors as terminal constraint, maximum terminal vertical and horizontal position errors and minimum control inputs as performance index, a penetration trajectory satisfying control inputs’ saturation limitations is developed with optimized Model Predictive Static Programming(MPSP). Furthermore, by the optimized algorithm, not only the convergence rate is guaranteed under the vehicle’s control inputs’ saturation limitations, but the convergence robustness is enhanced under different initial conditions and constraints by adaptively adjusting the weight matrices of control inputs and the vector errors between expected and actual terminal states.
Air-Breathing hypersonic vehicles;Penetration in cruise phase;Attack and defense countermeasure;Optimized model predictive static programming
2016-09-12;
2017-01-03
V448.13
A
1000-1328(2017)03-0287-09
10.3873/j.issn.1000-1328.2017.03.009
郭 行(1990-),男,博士生,主要研究方向为高超声速飞行器制导控制。