基于激光扫描点云的隧道断面提取方法
2017-03-30纪思源王同合张国龙
纪思源,王同合,张国龙,李 敏
(信息工程大学,河南 郑州 450000)
基于激光扫描点云的隧道断面提取方法
纪思源,王同合,张国龙,李 敏
(信息工程大学,河南 郑州 450000)
传统断面测量方法存在效率低、精度差等特点,为优化断面测量方法,提出利用地面激光点云提取断面的方法。其主要包括:中轴线拟合、点云分割、断面提取三步骤。在基于点云双向投影确定初始中轴线的基础上,运用弦高偏移算法,提取骨架特征拐点,对中轴线分段再次拟合,获取二次中轴线;点云分割是基于隧道中轴线进行的,对隧道的点云数据进行连续分割,对截取的断面进行椭圆拟合。实验表明,通过此方法快速提取中轴线上任意位置的断面。
双向投影;弦高偏移;中轴线拟合;断面提取
近几年,地面三维激光扫描技术凭借快速、高精度、无接触测量的扫描测量方式,实现目标对象面数据的快速采集,广泛应用于地形勘测、古建筑文物保护、数字城市等领域[1-4],在地下隧道工程领域得到广泛的应用[5-7]。
目前在隧道断面测量中,普遍采用全站仪、断面仪、测量机器人等测量设备,测量机器人与编程计算器配套使用[8],通过控制软件,或者PDA控制数据采集,如TM隧道断面测量系统[9],文献[10]利用车载相位式激光测距装置对隧道内壁进行连续测量以检测其形变状态的方法。以上常规断面测量方式监测点数量有限,监测时间长,无法全面反映隧道断面变形,隧道内光线、视距等作业条件限制,在测量效率、精度等方面具有一定的局限性。相比传统单点式测量手段,三维激光扫描技术更加全面采集目标数据。文献[11]运用最小二乘法和随机采样一致性算法拟合隧道中轴线和断面,文献[12]和[13]提出隧道点云断面连续提取的方法,并对两期断面进行形变分析。以上利用点云提取断面的方法,考虑到扫描仪的测距和单点精度,在距离测站较远时,拟合的中轴线易出现偏差影响断面拟合精度。
针对上述情况,本文利用地面三维激光扫描仪获取隧道内部点云数据,通过点云双向投影,搜索上下边界拟合二次曲线求平均值,得到隧道初始中轴线,在此基础上,设计弦高偏移算法,提取初始中轴线上的骨架特征点,对中轴线分段拟合得到第二次轴线;基于二次轴线对隧道点云分割,对某一位置的分割点云,投影到该处的法平面上,拟合得到该点的断面。实验证明该方法可以实现对隧道断面任意位置处的断面提取。
1 实现方法
1.1 中轴线提取
通过双向投影将空间三维点云转换到二维平面上,能够更直观反映出隧道在水平和垂直方向上的变化,根据隧道点云的空间特点,将其分别向XOY、XOZ两个平面方向投影见图1。
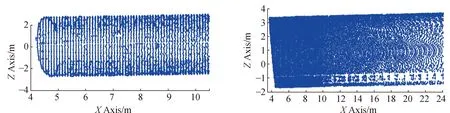
图1 双向投影
投影后的平面点云边界部分可用于中轴线[12],边界可以借助Delaunay三角网求得[14-16]。Delaunay三角网边界提取的计算原理:在进行构网的过程中,每条边都使用三角形的两个顶点进行验算,记录顶点坐标;如果在整个计算过程中,这条边只出现一次,说明这两个顶点确定的一条边没有被其他三角形共有,保存这两个顶点坐标;如果出现两次,说明两个顶点确定的一条边被两个三角形共有,若这条边在整个三角网内部,将其排除[17]。
将提取的上、下边界点云进行多项式曲线拟合:
f(x)=p1xn+p2xn-1+…+pnx+pn+1=PXT.
(1)
其中:P=[p1p2…pnpn+1],XT=[xnxn-1…x2x1]。
点云在两个平面内的投影边界多项式为
(2)
联合上下边界曲线,取均值作为隧道的初始中轴线:
(3)
根据曲线的长度和曲率,对中轴线进行初步插值,初步插值点作为中轴线的初始控制点,插值点数根据需要设定。为了更精确地表达中轴线形状,对于曲率变化较大区域,根据式(6)求得过相邻初始控制点间的空间直线夹角,判断局部区域的曲率,进一步加密细化。
设过初始控制点l1的切线方程:
u1=l1i+m1j+n1k.
(4)
过初始控制点l2的切线方程:
u2=l2i+m2j+n2k.
(5)
则两空间直线方向矢量夹角θ为
(6)
在狭长的空间环境,若采用多项式整体拟合中轴线会出现偏差[18],针对这种情况,本文提出了利用弦高偏移算法判断中轴线上的初始控制点及加密点是否为特征点,分段拟合中轴线。即通过计算一点到线段的距离,判断其是否大于给定的弦高阈值,如果大于弦高阈值则认为该点为特征拐点见图2。该算法的步骤:
1)设定弦高阈值εh,从图2中的第一点p0开始,计算弦p0p1p2的弦高,即h1
2) 如果p1是特征拐点,则计算p1p2p3的弦高;如果不是,则计算弦p0p2p3的弦高。
3)按照此方法,循环计算到中轴线的最后一个点为止,不满足弦高要求的点予以删除。
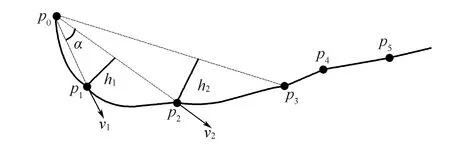
图2 弦高偏移算法原理
其中:pi(i=0,1,2,…)是由初始控制点和加密点按照下标排序组成的点集。弦高阈值εh太大会导致提取的骨架特征点数目较少,数值太小会导致提取的骨架特征点数目太多。假设pi点集都是骨架特征点,每个点的弦高用hi(i=1,2,…,n)表示:
n.
(7)
1.2 点云分割

f′(x)=np1xn-1+(n-1)p2xn-2+…+
(8)
根据中轴线该点的法向量,则过该点的法平面方程为
x-xi+y′(y-yi)+z′(z-zi)=0.
(9)
根据法平面方程,截取距离该法平面一定厚度阈值d的点云[12],用点集Φ(xiyizi)表示:
(10)
将搜索切割后的点云投影到法平面上得到平面点云数据。
(11)
其中:k为原点到该法平面的距离,k为
1.3 断面截取

(12)
式中:Rθ,Rβ分别为绕z轴和y轴的旋转矩阵,表示为
2 实验与分析
本实验数据采集于郑州市某地铁隧道,仪器采用Riegl-vz400扫描仪和Leica TC1201全站仪,扫描仪标称扫描距离600 m、100 m;单点扫描精度3 mm,激光发射频率300 000点/s,扫描视场水平方向360°,垂直方向100°;TC1201全站仪测角精度1 s,测距精度 ±(2 mm+2×10-6D)。图3所示区间长度为35.968 m的隧道点云三视图,数据原始点云包含有1 117 467个点,滤波后包含223 494个点。
如图4所示提取XOZ平面点云边界,从图4中可以看出隧道在水平和垂直面内的走向。
本文采用5次多项式对边界点云进行拟合,用f1,f2,f3,f4分别表示XOY,XOZ的上、下边界点云拟合的多项式函数。在截取的隧道区间段点云,曲率变化较小,根据式(7),设置εh=6 cm。拟合的多项式参数如表1所示。

图3 点云三视图

图4 边界点云

表1 边界点云多项式拟合 m
根据式(3)即可得到隧道的中轴线。图5分别为提取X=6 m、8 m、10 m的厚度d=2 cm的断面,每个断面平均耗时2.5 s,相对于常规测量方法,在效率方面有较大地提高。

图5 不同位置处断面
在上述断面位置架设全站仪,每个断面上测量30个点,按照最小二乘法拟合断面[18],拟合结果和点云拟合结果比对,用(Xc,Yc)表示拟合的断面圆心,a,b表示长、短半轴,表2为拟合断面参数。

表2 断面参数 m
扫描仪和全站仪所获得的两种数据拟合的断面参数误差在1.3 mm以内,满足变形监测的需求。表3所示为两期断面不同方位处形变比较。

表3 断面两期各个方位形变情况 mm
将各期数据转换到统一坐标系,由第一期点云提取隧道中轴线,其后各期数据直接利用第一期数据提取的中轴线在相同位置截取隧道断面,按相同方法,对不同期的断面进行分析即可得到相应时期内的形变量。
3 总 结
地面三维激光扫描仪应用到隧道扫描中,可以快速的提取隧道的断面,并提高断面测量效率。同时比对提取断面和隧道的设计半径可获知隧道断面的变形情况。
[1] BITELLI G, DUBBINI M, ZANUTTA A. Terrestrial laser scanning and digital photogrammetry techniques to monitor landslide bodies[J]. 2004.
[2] 陈弘奕, 胡晓斌, 李崇瑞.地面三维激光扫描技术在变形监测中的应用[J]. 测绘通报, 2014(12):74-77.
[3] 臧伟, 钱林, 孙宝军, 等. 地面三维激光扫描技术在工程测量中的应用[J]. 北京测绘, 2015(3):130-135.
[4] 刘云广. 基于地面三维激光扫描技术的变形监测数据处理[D]. 北京:北京建筑大学, 2013.
[5] 谢雄耀, 卢晓智, 田海洋, 等. 基于地面三维激光扫描技术的隧道全断面变形测量方法[J]. 岩石力学与工程学报, 2013,32(11):2214-2224.
[6] 毕俊, 冯琰, 顾星晔, 等. 三维激光扫描技术在地铁隧道收敛变形监测中的应用研究[J]. 测绘科学, 2008(增2):14-15.
[7] 胡琦佳. 三维激光扫描技术在隧道工程监测中的应用研究[D]. 成都:西南交通大学, 2013.
[8] 许小松. 全站仪配编程计算器进行隧道断面测量[J]. 数字技术与应用, 2010(11):36.
[9] 陶坤, 何小平. TM隧道断面测量系统在施工质量控制中的应用[J]. 施工技术, 2008,37(11):73-76.
[10] 周奇才, 金奇, 高嵩, 等. 基于激光测距技术的隧道断面形变检测系统[J]. 测控技术, 2010,29(5):44-46.
[11] 托雷. 基于三维激光扫描数据的地铁隧道变形监测[D]. 北京:中国地质大学, 2012.
[12] 李珵, 卢小平, 朱宁宁, 等. 基于激光点云的隧道断面连续提取与形变分析方法[J]. 测绘学报, 2015,44(9):1056-1062.
[13] 吴君涵,余柏蒗,彭晨,等.基于移动激光扫描点云数据和遥感图像的建筑物三维模型快速建模方法[J].测绘与空间地理信息,2016,39(1):24-27,34.
[14] 王果. 不同平台激光点云数据面状信息自动提取研究[D]. 北京:中国矿业大学, 2014.
[15] 杨忞婧,刘丽,张金兰,等.三维激光扫描技术在曲面模型重建中的应用[J].测绘与空间地理信息,2016,39(8):158-159,165.
[16] 刘士程. 基于LiDAR数据提取建筑物顶面轮廓线方法研究[D]. 成都:西南交通大学, 2012.
[17] 吕钊. 基于地面激光扫描数据的建筑物变化检测研究[D]. 北京:中国地质大学, 2011.
[18] 陈卫. 基于TLS技术的危岩体变形监测方法研究[D]. 西安:长安大学, 2014.
[19] 高俊强, 陶建岳. 利用免棱镜全站仪进行地铁隧道断面测量与计算[J]. 测绘通报, 2005(10):41-43.
[责任编辑:李铭娜]
Application of laser scanning point clouds to the subway tunnel section extraction
JI Siyuan,WANG Tonghe,ZHANG Guolong,LI Min
(Information and Engineering University,Zhengzhou 450000,China)
The traditional cross-section measurement method has the shortcomings of low efficiency and poor precision. In order to optimize the method of cross-section measurement, this paper proposes to use ground laser point cloud to extract section. It mainly includes three main steps: center axis fitting, point cloud segmentation and section extraction. On the basis of determining initial axial line based on the bi-directional projection of point cloud, the chord height offset algorithm is used to extract the inflection point of framework feature, and the central axis segment is re-fitted to obtain secondary central axis; the point cloud segmentation is implemented based on tunnel central axis, point cloud data of the tunnel is segmented continuously, and the intercepted sections are elliptically fitted. Experiments show that this method can be used to quickly extract the cross section of any position on the central axis.
bidirectional projection; chord height offset; central axis fitting; section extraction
引用著录:纪思源,王同合,张国龙,等.基于激光扫描点云的隧道断面提取方法[J].测绘工程,2017,26(6):66-70.
10.19349/j.cnki.issn1006-7949.2017.06.012
2016-05-20;
2016-06-03
纪思源(1990- ),男,硕士研究生.
P228.4;U456
A
1006-7949(2017)06-0066-05
