基于内模滑模控制法的气体质量流量控制系统的研究
2017-03-30程子珍张雷英昌盛
程子珍,张雷,英昌盛
(1.长春理工大学理学院,长春 130022;2.长春理工大学科技处,长春 130022;3.吉林师范大学计算机学院,四平 136000)
基于内模滑模控制法的气体质量流量控制系统的研究
程子珍1,张雷2,英昌盛3
(1.长春理工大学理学院,长春 130022;2.长春理工大学科技处,长春 130022;3.吉林师范大学计算机学院,四平 136000)
为了解决当气体质量流量控制器多次快速改变输出流量数值的设定值后,气体质量流量传感器无法迅速响应控制器设定点的快速变化,进而引起该传感器响应迟滞这一问题,对影响气体质量流量控制系统控制性能的因素进行分析,采用一种新的控制方法—内模滑模控制法。从控制器结构出发,分析它的工作原理,利用Simulink对控制系统进行建模仿真,通过与PI算法控制器的对比,分析比较两个控制器对传感器补偿后的系统响应结果,验证新方案的可行性。研究结果表明,这种控制方法响应迅速,控制精度高,提高了系统的稳定性,满足试验测试要求。
气体质量流量控制器;气体质量流量传感器;响应迟滞;内模滑模控制方法
在工业生产中,气体质量流量控制系统广泛应用于高精密配气仪[1]、半导体制造工艺等领域。随着检测标准的标不断提高,现代技术产业生产对产品质量有了更高的要求。气体质量流量控制系统的组成包括[2]气体质量流量传感器,控制器以及针型阀。控制器作为系统的核心部件,通过调整控制器的各项参数,优化系统给定的条件(如上游压力、下游压力,物理方向以及设定点等),降低系统误差,提高控制精度。目前PI控制器[3]是市场上比较常见的控制器类型,当控制系统对控制器动态响应要求不高时,可以选用PI控制器,但是针对多次快速改变控制器的设定条件后,PI控制器便无法有效的补偿气体质量流量传感器因响应迟滞所带来的控制误差,导致其控制性能受到影响。
本文针对这一问题,设计了一个采用内模滑模控制方法的控制器来代替PI算法的控制器的方案,与PI控制器相比,所设计的内模滑模控制器对有输入时滞的不确定性系统具有较强的鲁棒性,尤其是对非线性系统的控制具有良好的控制效果,由于内模滑模控制器算法简单,响应速度快,对外界噪声干扰和参数摄动具有鲁棒性,通过状态变换的方法迫使系统按照滑模状态轨迹运动,有效的补偿传感器因响应迟滞造成的系统误差,提高系统的动态响应和控制精度。
1 现质量流量控制系统设计的缺陷
1.1 气体流量传感器工作原理
该类型的传感器是采用热温差原理调节气体的流量的闭环控制输出系统[4]。在传感器内部结构中采用毛细管传热温差量热法原理测量气体的质量流量,传感器内部管道在电流作用下对两端的热敏电阻丝加热,当气体流经管道上游端的热敏电阻丝后,会带走一部分热敏电阻丝的热量,使上游与下游之间的电桥产生一个温度差,通过塞贝尔效应推算电桥两端温度的变化确定气体的流量值,结构原理图如图1。
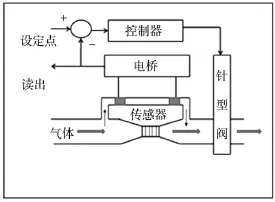
图1 质量流量控制器结构原理图
1.2 气体流量传感器的局限性
理想状态下,当单位时间内气体流量以一定比例的速度增大并流经传感器[5],理论上传感器检测到的气体流量增长应该是线性的。但是实际流量曲线表现为一个近似的阶跃函数。这是由于当气体流经传感器的管道内,在较短的时间周期内传感器电桥两端热敏电阻丝的热量被气流带走从而温度变化不明显,缓慢的热传导率在相同的温度装置中需要一个比较长的时间周期,进而引起传感器响应迟滞,最终导致实际流量曲线与理想的流量值不相符。实际流量曲线与理想流量的关系如图2。因此需要在控制系统引入误差修正的手段来使实际测得的流量输出趋于理论值。图中τ代表时间常数。

图2 实际曲线与理想曲线的时间与流量的关系
2 设计内模滑模控制器
气体流量传感器响应曲线,本质上可以看作是控制作用不连续的非线性控制。不过系统的“结构”并不固定,而是依照着当前的状态有目的不断变化的。现提出结构变化的过程中,若能设计出一种模态控制,可以让系统状态点沿着轨迹逐渐稳定到平衡点,则称之为“滑动模态”控制,简称滑模控制(Sliding mode controller,SMC)。这种滑模控制的表达式如公式(1)

其中,η是控制使系统达到平滑状态的可调速度参数(或称可调增益),δ是用来降低曲线抖动的函数,滑动曲面S(t)是滑动模态运动时系统沿着该曲面运动的函数。
依据这种原理,引用一种内模滑模控制器(Internal model Sliding mode controller,IM-SMC)来解决响应延迟问题。其控制原理结构如图3所示:

图3 内膜滑膜控制原理结构图
由上图3可以看出,该控制器分为两个部分:滑膜控制器和相轨迹渐近稳定模态控制器。其中滑膜控制器的主要作用是保持控制系统可以按照设定的闭环滑动的轨迹运动,相轨迹渐近稳定模态控制器是为了使其系统的运行轨迹可以达到抵达的平衡点,实现自主修正模型控制量。在这里通过采用Smith预估控制[6],在滑模控制中引入一个预估补偿模型—一阶加纯滞后(A first-order plus dead time,FOPDT),用以调节因较大的纯滞后时间造成的时间延迟,从而使闭环特征方程不含纯滞后项,抵消纯滞后所造成的影响,提高该闭环系统的动态响应。根据滑膜控制公式,一阶加纯滞后(FOPDT)的表达式为

其中,K—静态增益,t0—纯滞后时间,α—一阶滞后。这个模型主要由以下两个部分构成。

其中,G+是这个模型的延迟函数,G-是消除了模型中的时间延迟的函数,在这个模型的引入下,原理图改进为图4。

图4 引入FOPDT的内膜滑模控制原理图
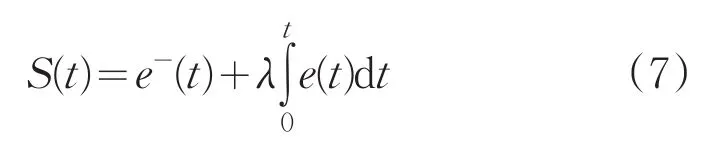
接下来假设滑模控制的滑动曲面S(t)[7]的表达式为

其中,λ—调整参数;r(t)—给定参考值;y-(t)—模型的滞后输出;y(t)—控制变量;em(t)—模型误差;e-(t)—给定参考值r(t)与模型无延迟输出y-(t)之间的误差。
由公式(5)可以看出滑模控制由给定参考值、模型输出,以及模型误差共同完成系统功能控制,控制变量可以看做是该模型输出响应的反馈[8]。所以根据控制结构模型,有下面变形公式:

则简化后公式(5)可以被改写为:
为了满足滑动条件,dS(t)/dt=0,所以从公式(6)和公式(7)可以得出

把延迟函数(4)代回公式(1)并进行微分,可以得到公式

把以上两个公式相加可以得到一阶加纯滞后的模态控制方程

把一阶加纯滞后方程代回原滑膜控制方程,得出滑模控制的改进方程(u(t)为控制输入)

要完成滑模控制设计,需要建立一套调整方程,来减小系统误差,提高输出的响应特性。这里采用Neider-Mead算法(也叫单纯形算法)对得到的滑模控制方程进行约束,从而来加快算法的收敛速率。其约束方程为:
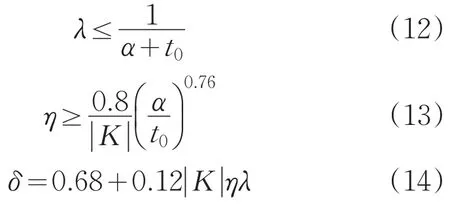
代入滑模控制方程,最终得到滑模控制方程和画面表达式为
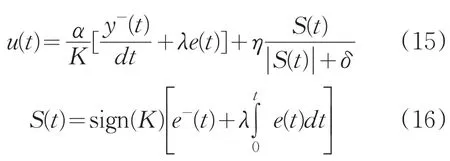
其中sign(K)为静态增益[9-10]
内模滑模控制器的simulink仿真模型如图5所示:

图5 内模滑模控制器仿真模型图
3 实验结果与分析


图6 PI控制器与内模滑模控制器仿真结果图

表1 均方根误差结果比较
4 结论
仿真试验结果表明,利用内模滑模控制方法的控制器有效的改善了质量流量控制系统中传感器响应迟滞的问题,提高了该系统的稳定性和控制精度,弥补了传统PI控制器响应速度慢的缺点,并且这种变结构滑模控制方法设计简单,可以满足质量流量控制系统的气体流量控制的实验要求。
[1]于鹏.基于质量流量的智能气体配比仪的开发与研究[D].沈阳:沈阳理工大学,2008.
[2]程子珍.基于PID算法的气体质量流量控制器的研究[D].长春:长春理工大学,2017.
[3]李钟慎.FOPDT模型的PI参数整定法[J].组合机床与自动化加工技术,2006,(10):63-66.
[4]JohnC Harley,Yufend Huang,et al.Gas flow in micro-channels[J].Fluid Mechanics,1995(284):257-274.
[5]聂乐乐,李丽娟,王劲松,等.基于Labview模糊PID温度控制系统[J].长春理工大学学报:自然科学版,2011,34(4):59-60.
[6]杨海勇.史密斯预估补偿控制及MATLAB仿真[J].科技资讯,2007(29):4-5.
[7]Carlos Smith,Oscar Camacho.Sliding Mode Control:An Approach to Regulate Nonlinear Chemical Processes[J].ISA Trans,2000,39(2):205-218.
[8]孟鑫,王忠,马淋军,等.电子节气门滑模变结构控制硬件在环仿真的试验研究[J].测控技术,2011,40(1):61-68.
[9]张勇,巩敦卫,张婉秋.一种基于单纯算法的改进微粒子群优化算法及收敛性分析[J].自动化学报,2009(3):290-296.
[10]吴宝举,李硕,王晓辉.自治水下机器人自适应滑模控制[J].机械设计与制造,2010(7):142-144.
Research on Internal Model Sliding Mode Method in Gas Mass Flow Control System
CHENG Zizhen1,ZHANG Lei2,YING Changsheng3
(1.School of Science,Changchun University of Science and Technology,Changchun 130022;2.Science and Technology Department,Changchun University of Science and Technology,Changchun 130022;3.Computer College,Jilin Normal University,Siping 136000)
In order to solve the problem that while the gas mass flow controller repeatedly changes the output flow value,gas mass flow sensor cannot quickly respond to the rapid change and therefore lead to sensor’s measurement lag,the factors affecting the control performance of Gas Mass Flow Control System are analysed,and a new method named Internal Model Sliding Mode method is adopted.The working principle of controller structure is analysed so as to build model and simulate the control system by Simulink.The feasibility of the new method is verified by comparing response results of control system with PI algorithm controller.This study results show that the response of new method is more faster,accurate and stable,which means that the new method meets the test requirements.
mass flow control system;gas mass flow sensor;response lag;internal model sliding mode method
U463
A
1672-9870(2017)01-0030-04
2016-10-26
程子珍(1991-),女,硕士研究生,E-mail:963512619@qq.com
张雷(1978-),男,博士,副研究员,E-mail:benchi45009@qq.com
