温馨启行
2017-03-30姜涛吴振飞蔡毅杰邵宝东
姜涛+吴振飞+蔡毅杰+邵宝东
摘 要:基于2.4 G无线通信模块扩展外围硬件,遵循感知层、网络层和应用层三层设计的原则,文中设计了一款基于物联网和音视频分析技术的智能候车室监控系统。大幅降低了监控系统的媒体数据存储、处理、交换和管理压力,提高了系统的运行效率和有效信息的利用,具有良好的社会效益与广阔的发展前景。
关键词:物联网;音视频分析技术;智能候车室监控系统
0 引 言
该作品基于2.4 G无线通信模块扩展外围硬件,开发相应的系统软件,构建了一款基于物联网和音视频分析技术的智能候车室监控系统。系统包括环境监测子系统、旅客安全防护子系统及便民服务子系统。演示模型如图1所示。
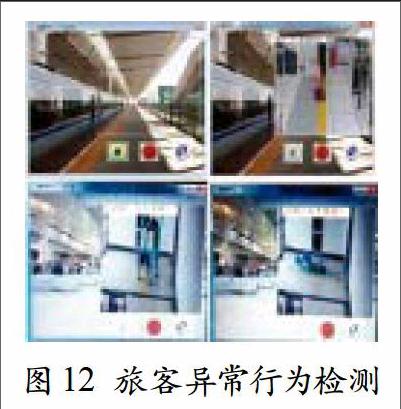
环境监测子系统由2.4 G无线通信模块及其相关外围电路组成。系统的传感器节点可对物理环境信息进行采集,然后将采集到的物理信息通过无线网络发送到控制中心节点,控制中心节点再将数据按规定格式发往管理中心。在管理中心设计了用户操作界面,便于管理人员对数据进行分析和处理。传感器实物及PCB如图2所示。
旅客安全防护子系统综合应用了计算机视觉、语音信号处理、模式识别等技术。主动对旅客的音视频信息进行实时检测、分类、识别和跟踪,使计算机具备理解和分析人类行为的能力,从而实现安全预警,最大程度防止意外情况的发生。旅客异常事件检测如图3所示。
通过将物联网和音视频分析技术应用于候车室安防与控制系统,使得车站管理人员从手动控制各设备到系统根据环境参数自动调节,从“紧盯屏幕”的低级监控模式到系统主动监控模式,体现了智慧城市设计的新理念。
1 候车室智能控制系统设计方案
1.1 智能候车室控制系统结构设计
智能候车室系统需要获取不同类型传感器节点的数据,根据不同的应用环境选择合适的技术实现节点间通信,实现感知层与互联网的连接。考虑到系统的结构体系,为使其能够安全、可靠的运行,增强可维护性,本系统设计遵循感知层、网络层和应用层三层设计的原则。智能候车室控制系统的结构框图如图4所示。
本系统的简化结构框图如图5所示。终端节点、路由节点、协调器通过ZigBee无线通信方式组网。协调器与监控管理平台通过串口实现通信。计算机和手机客户端与监控管理平台的信息交互通过Client服务器实现,远程浏览器与监控管理平台的信息交互则通过Web服务器实现。
1.2 智能候车室控制系统各层次设计
1.2.1 感知层设计
(1)无线数据传输和控制终端
本系统的无线数据传输和控制终端基于CC2530芯片设计,其组成框图如6所示。传感器节点主要由数据采集模块、数据处理模块、无线通信模块和能量供应模块组成,主要完成数据的采集、处理及发送。数据采集模块主要负責传感器采集数据,将采集的状态数据转换成电压、电流等物理模拟信号后再发送到调理电路,通过调理电路的AD采样将信号从模拟量转换成数字量并交由数据处理模块处理。数据处理模块主要负责数据的处理操作、数据存储、任务管理调度及能耗管理等工作。无线通信模块主要负责与其它通信节点进行无线通信连接,收发采集到的数据,控制命令等信息。能量供应模块是整个传感器节点的能源供应点。
(2)传感器模块的设计
CO2模块:根据灵敏度的需要及成本控制的要求,系统采用MG811二氧化碳传感器,并使用温度补偿电阻减少实际使用中的误差;多功能传感器模块:基于对多种传感器的研究,系统设计了一种复用式传感器采集模块,可实现光照、温湿度和火焰等参数的采集;烟雾模块:系统采用MQ-2传感器制成烟雾感知模块。
(3)主控模块的设计
为满足不同传感器的供电和控制,系统设计了通用底板,设计实物如图7所示。
1.2.2 网络层设计
通过将一系列空间分散的传感器单元通过自组织无线网络进行连接,将各自采集的数据通过无线网络传输汇聚,实现对空间分散范围内的物理或环境状态的协调监控,并根据这些信息进行相应的分析和处理。为提高系统工作效率,系统定义了严格的通信规约。系统软件获得的ZigBee协调器上报的数据是长度为66的比特流,比特流的帧格式及其含义如图8所示。特别需要强调的是,下行帧继电器地址数据的更新是在上行帧解析过程中完成的。从上行帧输出节点数据块中取出继电器地址数据,实时更新下行帧继电器地址数据。这是由于ZigBee的自组网特性无法保证各节点地址在传感器网络重新组网后保持不变。
1.2.3 应用层设计
本层的设计需要搭建系统应用平台和人机交互系统,综合运用数据库技术、网络技术、人机交互技术,实现信息从物理世界传向用户的过程和用户对感知网络终端节点的控制。
2 安防智能监控系统设计方案
2.1 安防智能监控系统关键技术
2.1.1 背景建模:基于Kalman滤波理论的背景建立与更新
背景差分法是目前运动目标检测最常用的方法,该方法把图像分为背景和前景,对背景进行建模,然后把当前帧与背景模型进行比较,与背景模型匹配的像素被标记为背景,不匹配的像素被标记为前景,同时更新背景模型。前景多目标跟踪的关键技术之一在于背景建模提取背景的好坏,由于卡尔曼滤波器是最优化自回归数据处理算法,采用的算法支持对过去、现在和将来的状态估算,对于大部分问题而言是最优的,效率最高的,且能在实际中提供背景更新,算法的实时性较高。因此在本次设计中采用Kalman背景建模法提取背景与更新。
2.1.2 前景目标获取
在经过分割后的前景区域中,目标被影藏在众多干扰中,这些干扰的形式类似于白噪声,均匀分布在整幅图像中,给我们后期处理带来很多麻烦。在实际处理前,应对求得的前景区域进行简单处理,提取出感兴趣的区域(ROI),即从干扰中将目标分离出来。具体算法及目标提取效果如图9所示。
2.1.3 基于支持向量机的运动目标识别
支持向量机是一种前馈网络的线性机,主要建立一个超平面作为决策曲面,使得两类模式向量分开的间隔最大,支持向量机是结构风险最小化方法的近似实现,在模式分类问题上能提供较好的泛化性能。
2.2 安全预警监控系统功能设计
2.2.1 运动目标识别
在候车室被控视频区域中,根据先验模型识别出目标类别,用于区分目标旅客,识别效果如图10所示。
2.2.2 站台安全黄线检测
检测穿越警戒线的人、动物等移动目标。在摄像机监视的视场范围内,可以设置多条警戒线并规定其禁止穿越方向。一旦有旅客按照禁止方向穿越黄色安全线立即告警,并用告警框标示出该移动目标。提醒车站管理人员注意有旅客穿越黄线。示意图如图11所示。
2.2.3 群体性事件检测
将监控区域内所有目标的坐标进行透视变换,求取目标在变换平面中的坐标位置。计算区域中所有目标的位移向量,根据计算得到的向量计算目标位移。根据求得的位移以及两帧图片间的延时,计算可得目标在变换平面中的瞬时移动速度。最后将该瞬时移动速度乘以真实场景与变换平面的比例就可得出目标真实的运动速度。在检测到高速目标后用最小矩形框来框定目标,同时结合敏感词语音识别技术,对旅客的可能性行为进行预判并預警。
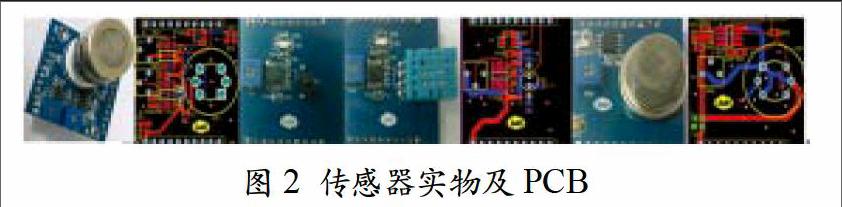
2.2.4 旅客非正常行为识别
在确定区域中的目标数量后,利用支持向量机进行行为识别。循环提取每一个目标,循环次数为目标的数量。计算选取目标的特征向量,再将其特征向量通过支持向量机进行分类,判断目标行为类型。识别效果如图12所示。
2.2.5 流量拥堵检测分析
对候车室旅客密度进行统计分析,与事先由管理人员设定的等级比对,并得出量化等级。当候车室内旅客密度达到一定等级且持续一定时间后报警,提示车站管理人员,应限制进入候车厅人数。
3 创新点
本系统具有如下创新点:
(1)该系统采用物联网和视频分析技术,构建了一种智慧型的跨媒体、跨传感器协同工作的候车室监控系统;
(2)将安全、环保、便民等因素引入系统设计,体现了智慧城市“以人为本”的管理理念;
(3)基于异常事件触发的监测监控工作模式,大幅降低了监控系统的媒体数据存储、处理、交换和管理压力,提高了系统的运行效率和有效信息的利用;
(4)多任务同时执行的工作模式提高了系统的可靠性。目前在全国大中城市中,尚无类似候车室管理系统,因此应用前景广阔。
(5)通过将物联网和音视频分析技术应用于候车室安防与控制系统,使得车站管理人员从手动控制各设备到系统根据环境参数自动调节,从“紧盯屏幕”的低级监控模式到系统主动监控模式,体现了智慧城市设计的新理念。
