雷达目标识别与处理系统的设计与实现
2017-03-29刘帅
刘 帅
(中国民航西北地区空中交通管理局宁夏分局,银川 750001)
雷达目标识别与处理系统的设计与实现
刘 帅
(中国民航西北地区空中交通管理局宁夏分局,银川 750001)
本文对雷达目标识别与处理系统进行了讨论。
雷达目标识别;航迹处理;目标显示
1 引言
随着我国民航事业发展,监视技术航管监视雷达,ADS-B,多点定位、场面监视雷达的日益完善和推广使用,空中交通雷达管制方式对飞行器最小间隔、空域流量等提出了更高的要求,同时对监视雷达的完好性、准确性和稳定性的依赖程度大大增加。这就要求对空管二次雷达目标准确性分析设备必须具有便携性与及时性,要求系统使用方法和界面更加友好、易用。雷达目标识别与处理设备在雷达、自动化系统的日常维护与定期检修方面发挥更大的作用。
2 目标识别与航迹平滑滤波
二次雷达目标识别与航迹处理是设计系统的关键,其包括点迹融合和航迹平滑滤波两部分,其中航迹综合处理细分为点迹关联、滤波处理及航迹管理[1]。处理流程如图1所示。
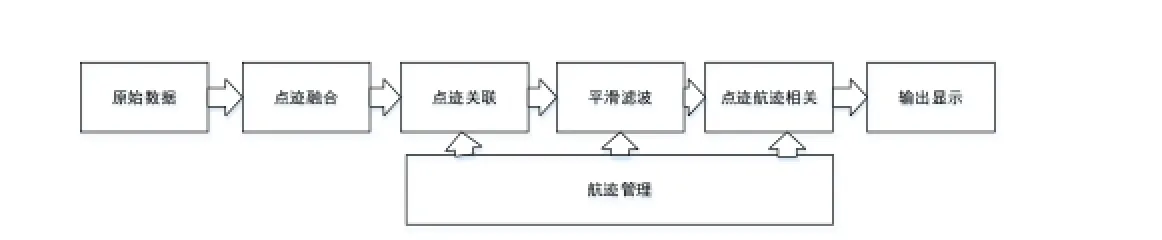
图1 目标识别与航迹处理流程图
2.1 目标点迹融合
假设雷达扫描一周送出的目标点迹数据集DataSet={Set A,Set B},其中Set A表示雷达A数据集,Set B表示雷达B数据集。A,B雷达数据合并时,首先选择Set A中点迹PAi将其与数据集Set B中一点PBj比较,根据方位和距离计算关联程度δij,当δij小于关联门限δ则认为两点可合并,将PBj列入点PAi关联集合Set A中;否则,选择在集合Set B中选取下一点进行同样计算。逐一遍历Set B所有数据,完成集合Set A构造。根据集合Set A中所有目标关联程度δij值,选择与点PAi最接近的雷达B的数据PBm点 进行合并,将目标高度信息增加到对应数据报文中。集合Set A中相同编号的多个点迹,直接根据目标识别码进行合并。集合Set B中剩余的没有分配到任何A模式点迹的目标数据,统一归入集合Set B2中进行二次合并。首先,在Set B2中选取一点PB2i作为起始点,与集合中其它各点计算关联程度,符合要求的Set B2数据列入集合Set B2i中,并对Set B2i中所有点进行合并;否则作为新起始点,重新构造集合Set B2i,直到遍历所有点迹数据。经过目标合并生成的数据报文,仍然包括有目标识别码和没有目标识别码两类。对于有目标识别码的点迹数据,应当充分利用目标编号以加快处理速度,提高处理精度。因此,在报文存放过程中,对上述两类数据需要分流、分别处理。
2.2 航迹平滑滤波
航迹平滑滤波包括点迹航迹配对关联、滤波跟踪以及航迹管理。点迹航迹关联完成目标数据关联矩阵,通过关联矩阵建立点迹航迹关联数据对。航迹更新利用卡尔曼滤波算法,根据已有航迹历史和新点迹平滑生成目标航迹。航迹管理根据点迹航迹关联矩阵结果,完成独立点迹判别,航迹初始化,航迹平滑和航迹终止周期。本文采用“惟一优先性准则”和“距离最近优先准则”[2],首先根据所有航迹与落入各自航迹的点迹的统计距离计算距离矩阵,然后搜索矩阵以选择距离最小处的点迹与该处的航迹配对,从分派矩阵中除去已配对点迹与航迹,对矩阵降秩,并重复上述操作,直至所有点迹分派到指定航迹或确定独立于任何航迹。
3 雷达目标识别与处理系统设计
3.1 软件系统架构
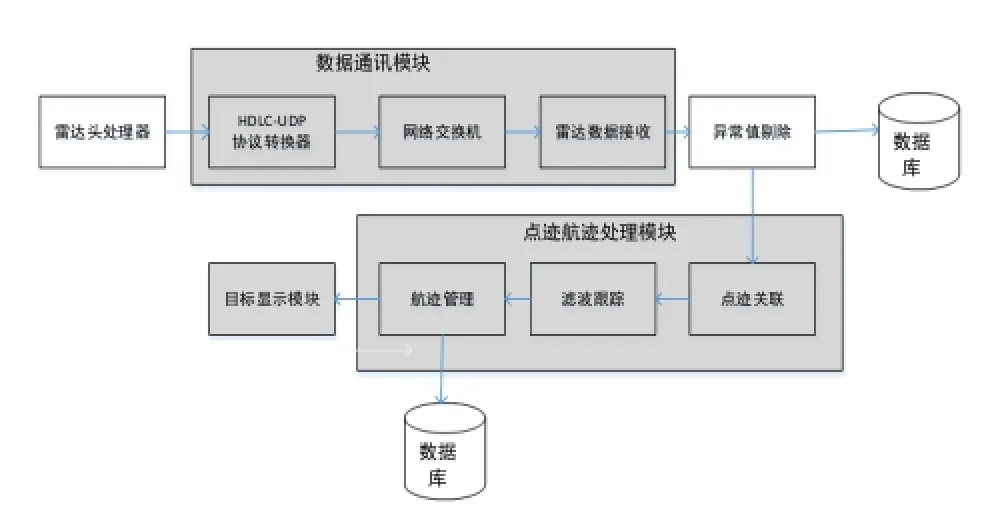
图2 软件系统架构
雷达目标识别与处理系统通过软硬件的结合,利用C#编程语言、MySQL数据库,能够实现多任务,通过多线程及线程间的通信,实现数据的实时通信和处理,能够实时图形化界面显示雷达目标,实现雷达目标数据的数据库存储,并保存相关数据。该系统主要分为数据通信模块、雷达目标点迹航迹处理模块、显示存储模块,整体软件架构如图2所示。
3.2 通信模块设计
雷达数据通信模块主要完成同步HDLC,ASTERIX格式的雷达数据。ASTERIX为欧控组织制定的一种雷达数据交换标准,由硬件和软件两部分组成。硬件部分由HDLC-UDP协议转换器完成,采用双FIFO实现无缝缓冲数据接收,并将接收到的数据一方面传输到协议转换板,另一方面将雷达数据封装成UDP数据包,通过网络传输传入到雷达数据解析模块。该转换器为可编程门阵列(FPGA)设计的高级数据链路控制(HDLC)协议控制系统,实现HDLC串口与以太网之间的接口转换,具有完善的数据转发、协议转换策略,实现HDLC帧与TCP/UDP/IP协议间的透明转换,同时扩展UDP协议转为HDLC协议[3]。实现多播UDP Client,UDP Server网络功能,给每部雷达分配惟一的组播地址和端口号,最终将输入的雷达原始数据由HDLC传输协议转换为UDP传输模式对外接入雷达数据解析软件系统。通信模块软件部分利用.Net平台提供的Sockets和Threading类,接收端多线程、套接字完成雷达数据接收。
3.3 雷达点迹/航迹处理系统
在解析雷达数据之前,在主程序中设置每一部雷达参数,诸如:IP组播地址、端口号、雷达型号、雷达数据格式、旋转周期、发射功率、雷达编号,以便系统地接收线程获取雷达UDP数据包。对接收到的雷达线程分别建立点迹合并类PlotDecode. cs、点迹航迹相关类TrackDecode.cs类,其中包括正则表达式、时间对准、坐标变换,使用Radarflag参数来区别雷达类型。解析完的雷达数据有CAT34服务信息、CAT48目标信息。以INDRA雷达为例,CAT34的服务信息主要为:正北信息和扇区信息[4]。CAT48的目标信息为:方位、距离、高度、速度;S模式数据,包括飞机地址码、航班号、comm-A、comm-B、comm-C和comm-D。由于各个雷达现场参数配置不同,在数据解析系统中对目标点迹归一化处理,形成统一格式标准,再采用卡尔曼滤波算法对目标位置进行平滑、预测,最终形成系统本地航迹,最后,将系统本地航迹根据自定义的格式存储到MySQL数据库中。
3.4 显示回放系统
显示回放系统采用API接口,多图层方式进行绘制。图层分别为地图图层、距离环图层、扇区图层、目标实时显示图层和目标信息图层。嵌套了.NET框架中内置的双缓冲技术,利用显卡前端缓冲区和内存后端缓冲区可以减少或消除重绘显示图面时产生的闪烁[5]。在主程序收到解码程序输出的雷达数据后,存储到定义好的一个容器中,该容器与显示界面一一对应,这样采用双缓冲技术,调用该容器中的数据,然后在图层中绘制距离环、雷达位置、背景地图、动态目标、扇区扫描等信息。系统回放功能利用MySQL数据库完成雷达数据回放,回放时间段可由用户自定义,支持7×24小时数据[6]。
4 实验数据验证
将此系统接入INDRA雷达系统,主程序记录解析后的雷达数据(图3),以时间为标识,记录时间精确到秒。30H开头的为雷达扫描到的目标信息,22H开头的为雷达实时发出来的扇区信息。解析系统的显示界面(图4),实时显示雷达扫描到动态的目标。小点表示位置,右下角显示目标信息。深色的半径线模拟雷达转动,经测试,真实性比较高,可以作为判断雷达是否故障导致停转等现象。经分析,该系统能够实时处理显示真实的雷达数据,系统设计准确。
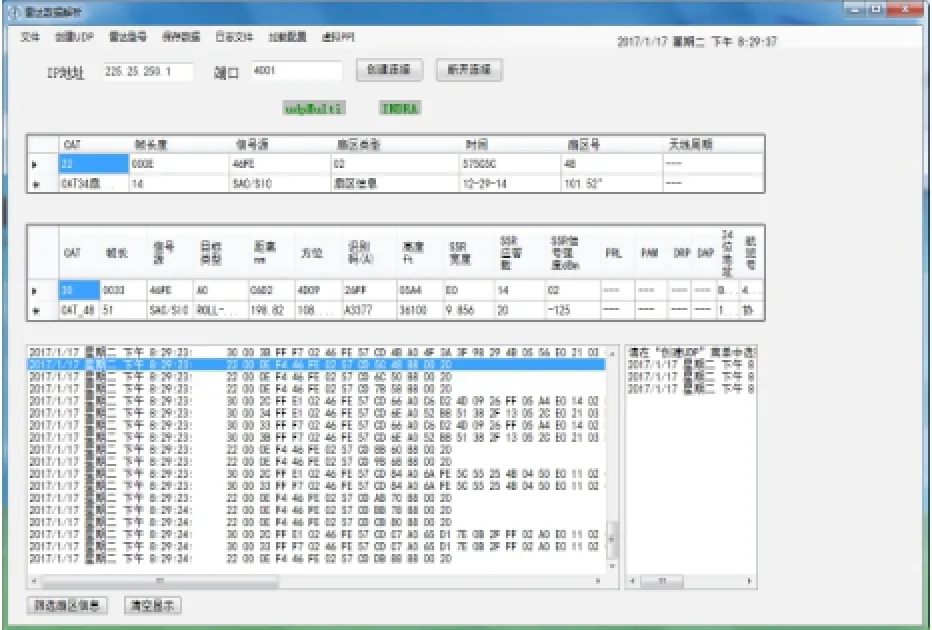
图3 解析后的雷达数据

图4 雷达目标显示界面
5 结束语
本文利用硬件数据通信和.NET的开发平台的Sockets、GDI+、双缓冲、多线程等技术,设计实现了雷达目标识别与处理系统,解决了近些年在空管技术单位缺乏S模式雷达数据分析设备的问题。系统对雷达头处理器输出的原始数据进行解析识别,通过点迹关联、滤波跟踪、航迹管理等综合处理输出目标显示,同时实现了数据库存储模块和雷达目标实时回放模块。该系统已经正式在线运行到INDRA IRS 20MP/L Mode-s型雷达,运行比较稳定。
[1] 陈京华.航管二次雷达航迹和点迹相关的基本原理[J].科技创新与应用,2012(2):19-20
[2] 刘宇,聂健荪,李永宁等.一种一二次雷达航迹相关的算法[J].中国民航飞行学院学报,2003,14(2):17-20
[3] 韩瑞新,刘小江,朱红胜,祝笑舟.基于光栅扫描的雷达显示系统仿真[J].计算机仿真,2005(11)
[4] A Raster scan radar display with new scan converting scheme and advanced graphics. Radar, 1996. Proceedings. Wang Desheng,Ji Xiuquan,Pan Hao,Yu zhihong. CIE International Conference of . 1996
[5] 徐关勇,曹华.电子海图与雷达图像及二次目标的叠加显示研究[J].舰船电子工程,2004(06)
[6] Thales ATM. NESACC EUROCAT-X System/Segment Specifcation[Z]. Thales Australia Air Systems 2004.
Design and Implementation of Radar Target Recognition and Processing System
Liu Shuai
(Northwest China Civil Aviation Air Traffic Management Bureau Ningxia Branch, Yinchuan, 750001)
Radar target recognition and processing system discussed in this paper.
radar target recognition; tracking processing; target display
10.3969/J.ISSN.1672-7274.2017.03.004
TN95文献标示码:B
1672-7274(2017)03-0013-03
