有限状态机在智慧清分扎把机器人中的应用
2017-03-29胡星
胡星
(广州广电运通金融电子股份有限公司,广州 510663)
有限状态机在智慧清分扎把机器人中的应用
胡星
(广州广电运通金融电子股份有限公司,广州 510663)
智慧清分扎把机器人系统复杂,功能模块较多,控制难度较高,引入有限状态机的设计思想将复杂系统分解成各个状态,实际系统在各个状态之间切换,极大地简化系统的复杂度,提高系统稳定性。
有限状态机;复杂系统;稳定性;清分扎把
0 引言
近年来,随着经济的高速发展,现钞流通量居高不下,各大银行都面临着较大的现钞清分处理压力,尤其在经济较发达的地区,面临更大压力,但是银行在现金清分处理方面仍有很多问题。因此中国人民银行相继发布多个文件,要求各商业银行必须对流通现钞进行全面清分、挑残,提升流通现钞的整洁度,以维护人民币的良好形象;要求各金融机构主动解决假币纠纷的举证及责任认定问题,逐步推进对外支付现钞全清分,落实冠字号全程记录,实现假币“零容忍”目标。
为缓解柜员的压力,各大银行对现钞智能清分设备的需求越来越大,以改变过去手工分拣标准不统一、效率慢的状态。目前在国内外纯清分机设备已有多家厂商,而能实现清分整理扎把的智慧清分扎把机器人厂家较少,主流厂商仍以国外厂商为主。主要因为智慧清分扎把机器人功能模块较多,系统复杂度高,因此控制难度较高,稳定性不足,因此引入一种简化系统复杂度的方法可以极大提高系统稳定性。下文将重点介绍有限状态机在简化系统复杂度的应用。
1 智慧清分扎把机器人方案
1.1 整体方案框图
如图1所示,智慧清分扎把机器人由以上几个大模块组成,各模块功能为:
(1)清分机,主要负责对钞票进行分拣,识别,归类;
(2)传输通道,将合格钞票传送到钞票堆叠整理机构,将不合格钞票传送到拒钞机构;
(3)拒钞机构,接收不合格钞票进行堆叠;
(4)钞票堆叠整理机构,对从传输通道送过来的合格钞票进行堆叠及整理,一个清分扎把机器人可以有多个堆叠整理机构;
(5)搬运机构,将堆叠整理好的批量钞票(通常为100张)从堆叠整理模块送入捆扎机构;
(6)捆扎机构,将搬运模块送入的批量钞票进行自动捆扎;
(7)投掷机构,将捆扎模块捆好的批量钞票送出。
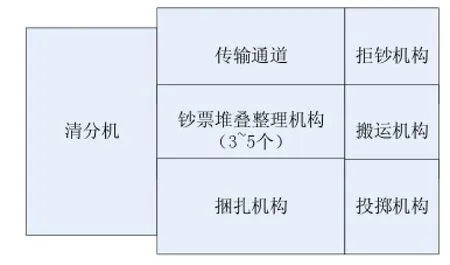
图1 智慧清分扎把机器人整机方案
1.2 系统难点
整个系统由多个相对独立又相互关联的结构组成。因此存在多个系统难点:
(1)单个机构动作较多:如钞票堆叠整理机构包含钞票分拣,钞票堆叠,钞票整理及机构复位等多个动作,各动作需要按照一定的时序进行。
(2)机构之间关联性较强:如搬运机构必须判断某个钞票堆叠整理机构已完成批量钞票的整理,才能从该机构获取批量钞票,同时需判断捆扎机构已完成上一捆扎任务并准备好接收下一任务,才能将批量钞票送入捆扎机构。
(3)实时性要求高:为了提高效率,多个机构需要并行处理。
2 有限状态机的应用
2.1 有限状态机介绍
有限状态机(Finite-State Machine,FSM),简称状态机,是一种用来进行对象行为建模的工具。其作用主要是描述对象在它的生命周期内所经历的状态序列,以及在这些状态序列之间的转换关系。通常由4部分组成:初始状态,指示系统开始时的状态;状态集,是描述系统中有限个不同状态的集合;输入符号集,是不同输入信息的集合;状态转换函数,把输入符号和现有状态转换到下一状态的转换函数[1]。
有限状态机有很多种表示方法,通常以文字、表格或者图形方式进行描述。单纯用文字描述不易理解,是很低效的描述方法,而用表格描述对于复杂系统不够直观,采用图形方式描述则较为直观,容易理解,下面将介绍图形描述方式。
状态转换图(State Transition Diagram,STD),是一种用图形方式描述系统的状态、以及相互转化关系的方法[2]。常见的画法如图2所示,主要包含几个关键元素:
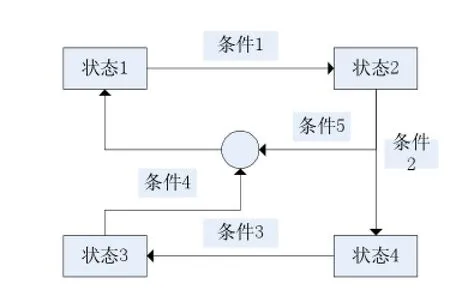
图2 状态转换图示例
●状态框:用方框表示状态。
●条件及转换箭头:状态转换的方向用箭头表示,触发条件在该箭头上标注。
●节点:当多个状态汇总到一个状态时,用多个箭头指向小圆圈连接汇总。
2.2 有限状态机简化系统
为了简化系统,下面先把智慧清分扎把机器人按模块设计状态转换图,以几个关键模块为例。如钞票堆叠整理机构的状态转换图如下所示:

图3 钞票堆叠整理机构状态转换图
机构启动后处于可接收钞票状态,当钞票进入后转换为钞票堆叠状态,钞票堆叠完成后转为钞票整理状态,钞票整理完成后,如果钞票堆叠的数量达到批量,则转换到等待取钞状态,如果为达到批量则转为可接收钞票状态继续接收钞票,在等待取钞状态下,如果钞票已被取走则转为可接收钞票状态。

图4 搬运机构状态转换图
搬运机构的状态转换图如上图,机构启动后,处于等待取钞状态,当钞票堆叠整理机构中的任意一个机构完成钞票批量堆叠和整理,转换到从堆叠机构取钞的状态,完成取钞后转换为等待捆扎结构空闲状态,当捆扎机构完成上一批量钞票捆扎时,转为为送钞到捆扎机构状态,完成送钞后,转换为等待取钞状态,继续下一任务周期。
如上方法可将捆扎机构,投掷机构等其他机构按同样方法构建状态转换图,通过状态转换图完成各子系统的设计。如前所述,在每个子系统的状态机中都存在依赖于其他子系统的事件来完成状态转换,因此需要对整个系统构建状态转换图,为了便于说明,下文仅对智慧清分扎把机器人系统中的钞票扎把部分为例做系统简化。
简化后的系统状态转换图如图5所示,以存在3个钞票堆叠整理机构为例,每个钞票堆叠整理机构抽象为两个状态,将钞票堆叠整理机构内部处理归为钞票堆叠整理状态,当堆叠钞票达到批量,则转换为等待搬运准备好状态,此时需要等待搬运机构送钞完成处于等待堆叠准备好状态,才会触发事件,两个机构的状态转换为从堆叠结构取钞状态,当取钞完成后,钞票堆叠整理结构转换为钞票堆叠整理状态,可以继续进行钞票堆叠整理,而搬运机构则转换到等待捆扎准备好状态,此时需要等待捆扎机构完成送钞处于等待搬运到位状态,才会触发事件,两个机构状态转换为送钞到捆扎机构状态,送钞完成后,搬运机构转换到等待堆叠准备好状态等待钞票堆叠整理机构完成批量钞票堆叠和整理,而捆扎机构转换到捆扎状态进行批量钞票捆扎,当捆扎完成后,转换到等待投掷准备好状态,此时需要投掷机构完成捆扎处于等待捆扎完成状态,才会触发事件,将两个机构状态转换为送钞到投掷机构状态,送钞完成后,捆扎机构转换到等待搬运到位状态,准备进行下一批量钞票捆扎,而投掷机构则转到投掷状态,将捆扎好的批量钞票投出,投掷完成后,转换为等待捆扎完成状态,等待下一完成捆扎的批量钞票。
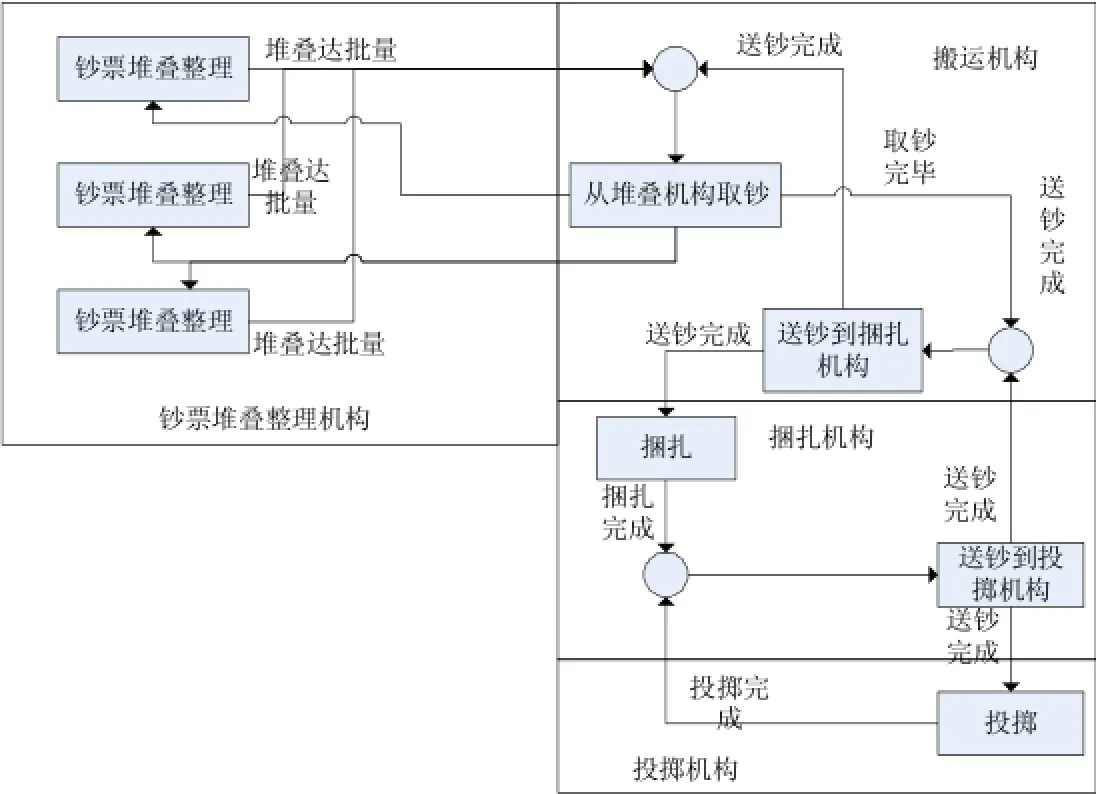
图5 智慧清分扎把机器人系统状态转换图
从上文描述可以看出,通过引入有限状态机可以将系统进行抽象和简化,上述虽然只列出了部分系统的状态转换图,但是根据以上方法对图4的系统状态转换图进行扩展就可以得到完整系统的系统转换图。
3 结语
本文介绍了有限状态机在智慧清分扎把机器人中的应用,通过有限状态机分解,简化了智慧清分扎把机器人的复杂系统,提高了系统稳定性和易维护性。该方法已在智慧清分扎把机器人的项目中得到应用,测试结果表明系统稳定性大幅提高。此方法也为复杂系统简化设计提高稳定性提供了参考方案。
[1]冯竞楠.利用有限状态机的交通灯控制系统设计与仿真[J].电子设计工程,2011,19(12):156-159.
[2]张俊.状态机思路在单片机程序设计中的应用[J].今日电子,2009(2):37-39
Application of Finite State Machine in Intelligent Sorter Strapper Robot
HU Xing
(GRG Banking Equipment Co.,Ltd.,Guangzhou 510663)
Introduces the design idea of finite state machine,which decomposes the complex system into various states,and real system switches between the states,greatly simplifies the complexity of the system,and improves the system stability.
FSM;Complex System;Stability;Sorter;Strapper
1007-1423(2017)04-0072-04
10.3969/j.issn.1007-1423.2017.04.016
胡星(1980-),男,湖北人,学士,工程师,研究方向为钞票控制类核心模块的研发及应用
2016-11-29
2017-01-20
