基于双目立体视觉的三维信息快速大尺度测量系统
2017-03-27杨巍
杨巍
(中国船舶重工集团公司第七一三研究所 河南 郑州450015)
基于双目立体视觉的三维信息快速大尺度测量系统
杨巍
(中国船舶重工集团公司第七一三研究所 河南 郑州450015)
机器视觉智能检测是一个全新的市场,它越来越广泛的应用到国内外的高端产品生产线。本文描述了一种可应用于复杂曲面快速自动检测的双目立体机器视觉系统,该系统应用空间解析几何坐标转换方法建立待检测物体坐标系。采用Ferguson曲面模拟物体形状,应用参数样条曲线、空间坐标转换等方法,实现快速的横向、纵向成型测量,本文还简要阐述了该系统的硬件实现和软件控制流程。
双目立体视觉;光平面方程;调焦机构;运动控制器
高端制造技术是一个国家或地区显示工业发达与否的关键,制造设备大体上分为生产设备和检测设备两大类,而精密检测设备又处于工业链的前端,是制造厂家生产过程不可缺少的工具,是制造的眼睛。测试设备已发展成为制造设备的一部分,集成到加工设备上,如焊接机器人中的视觉引导、车身三维尺寸测量站等。先进制造的发展需要新的测试技术:非接触、快速、高精度、在线(现场)。设备工业的空白是制约中国高端制造工业发展、升级的一个最重要因素。发展中国自主知识产权的高端精密检测设备工业,既是中国工业发展的逻辑结果,也将是工业新一轮发展的动力源泉。
文中所描述的三维信息快速大尺度测量系统,该系统由CCD摄像机、振镜和激光线投射器组成的,以光学三角测量法为基础,对测量物体查找定位点,进行三维坐标定位。之后将三维定位点的数据在摄像机生成的图像内进行参数标定,之后振镜转动,激光束逐个点进行扫描,勾勒出振镜视场内的激光平面,多个激光平面构成光平面方程和图像数据组合,即可比对出被测物体的三维信息数据。
1 基于双目立体视觉的实现
如图1所示,摄像机1和摄像机2相对位置固定,与被测物构成三角形,被测物在两像面上形成立体像对,根据匹配的像点,依据立体视差(Stereo Disparity)原理来获取被测物体的三维轮廓。
1.1 三维测量的实现
三维信息测量系统以结构光三角测量法为基础,由平面激光投射器和振镜构成的光源以射线状投射到被测物体上,CCD摄像机会拍下光平面的重叠投影区,CCD摄像机内置有结构光图像传感器,可采集各条不规则激光反射线条。

图1 双目立体视觉测量示意图
平面激光投射器发出的光源以一个扇形平面发散开,扇形平面经振镜发射后形成数个光平面,光平面与被测物体相交形成很多光柱条,CCD摄像机勾勒出视场内的光条的数量和位置。根据光学投影定理,可计算出光平面经过的三维坐标。随着振镜的转动,激光束在整个区域反复扫描,反射的光条在区域内自动识别,经过计算还原即可读出视场内物体的立体形状。
扫描过程如图2所示:

图2 系统原理图
1.2 摄像机测量建模
摄像机测量过程建模是将摄像机的二维平面成像的像素点(m,u)与被测物体的三维坐标点(x,y,z)的位置关系通过建模建立起数学对应关系,使平面像素点(m,u)方便的与三维坐标(x,y,z)进行映射和演化。根据摄像机的小孔成像原理进,模型建立过程如下:以光的投射方向为z轴建立三维坐标,则被测物体的空间坐标(x,y,z)可知。摄像机成像的像面建立在XO′Y二维平面,O′为光轴与摄像机成像面的交点,f是系统成像的焦距。
由空间矩阵的位置转化关系可求得二维平面像素点(m,u)与被测物体的三维坐标点(x,y,z)的位置关系,其变换式如下:
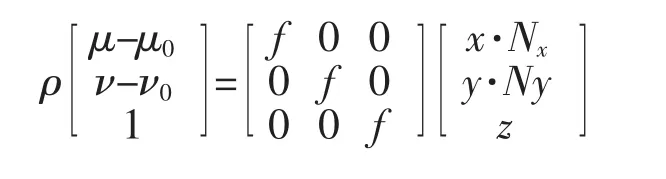

图3 摄像机测量模型
其中,(Mx,Ny)为图像平面上单位距离像素点数,可由摄像机给定参数换算得到;主点μ0,u0。可由摄像机像素参数确定;镜头焦距f为待求参数。
1.3 光平面方程的确定:
建立的振镜坐标系如图4所示,光面方程为:z= f(x,y),原点O位于振镜转轴上与摄像机镜头光心等高处,xw与振镜转轴重合,方向垂直于纸面向里,yw与y平行,zw与z平行。

图4 振镜坐标系
1)根据入射光面方程与镜面方程计算得反射光面方程为:

式中,A,B,C,D与a,b,c,d为入射光面方程与镜方程参数,为待确定参数。
2)假设从振镜坐标系owxwywzw到摄像机坐标系Oxyz的RT变换为:

将反射光面方程进行RT转化,为:
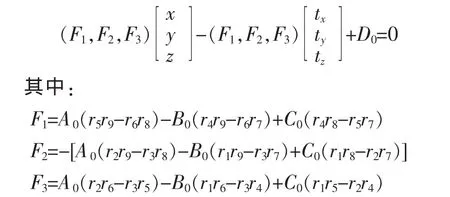
式中:旋转矩阵R—正交矩阵;T—平移矢量,分别表示xw、yw、zw坐标轴在Oxyz坐标系中的单位方向矢量。
2 运动控制器硬件设计
该运动控制器以TMS320LF2407 DSP为控制核心,附带有供电模块、外部闪存扩展电路、CAN通信总线接口电路、脉冲量转换电路、A/D数模转换电路等外围电路。此外还设计有:控制电路模块、光电隔离单元、功率放大单元、通信接口等模块。运动控制器开发板实物如图5所示。
该运动控制系统可实现三轴联动控制,分别为X、Y、Z三轴向。X、Y主要用于实现镜头的切换动作,需完成水平方向、轴向、圆弧环线等运动。Z轴用于实现显微镜镜头的轴向运动,以实现快速对焦。在接收到上位机发出的运动指令后,3个轴向的运动同步进行,不同轴向之间由独立的DSP指令实现协同运动。
控制系统的架构如图6所示:
控制系统将X、Y、Z 3轴分别独立成单个轴向的子控制器,由X轴向的子控制器通过SCI串行通信接口与上位机通讯,实现命令的接收,同时向上位机反馈当前平台所运行实际的坐标位置代码;对下他通过CAN口向另外的Y轴、Z轴控制器转发上层控制指令同时接受Y,Z轴平台的当前位置状态。

图6 系统平台架构
3 系统平台软件流程设计
系统平台的控制方式依托硬件平台而设计,控制部件有主控制器和从控制器两部分。
主控制器需要以串口通讯协议与上位机通信,接收上位机的操控指令,与从控制器通讯,获得从动控制器的偏差反馈信号,并再次执行,动态误差比较,图7为主控制器工作流程。从动控制器用于实时读取Y,Z轴在平台所处的位置信息,静默等待主控制器的控制指令,在主控制器发出读取位置指令后第一时间传送数据,从动控制器还执行CAN口的信息发送和指令的接收任务,图8为从动控制器工作流程。

图7 主控制器工作流程

图8 从动控制器工作流程
为了解决对焦镜头在接近目标位置发生的系统震荡而产生抖动的问题,我们采用曲线修正来逼近目标位置的方法,根据不同的采样周期,用PID模糊函数模拟出数学曲线进行位置逼近,如图8所示,根据位置的偏离程度,在范围内分段使用比例控制直线和积分控制曲线,如果电机有过冲则立刻使电机回转并停机,防止电机在临界点产生抖动。
4 结束语
机器视觉智能检测作为一个全新的市场,它越来越广泛的应用到国内外的高端产品生产线。国家“十二五”规划纲要把“提高自主创新能力”提到国家战略的高度,强调“按照走新型工业化道路要求,提出“振兴重大技术装备”、“努力突破核心技术,提高重大技术装备研发设计、核心元器件配套、加工制造和系统集成的整体水平”。
文中所述的双目立体机器视觉系统,可应用于复杂曲面快速检测,符合国家产业政策,属于朝阳行业。装置集光机电一体化,整合了光电测量技术、视觉测量技术等关键技术,能高效率实现自动测量,可充分利用各种资源,具有十分显著的社会效益。
[1]李乔亮,汪国有,等.基于局部特征聚类匹配的多谱图像配准方法[J].计算机工程,2009,35(15):4-6.
[2]范伟,余晓芬,等.纳米电机驱动大行程超精密工作台的设计研究[J].电子测量与仪器学报,2008,22(2):42-45.
[3]江伟欢,程良伦.水火弯板运动控制系统的研究[J].机床与液压,2009,37(10):181-184.
[4]Jaehwan Kim,Hyang-K Kim,Seung-Bok Choi.A hybrid inchworm linear motor[J].Mechatronics,2002,12(4):525-542.
[5]张道德,胡新宇,杨光友.一种改进的随机Hough变换圆形检测算法[J].电子器件,2009,32(3):722-723.
[6]侯子良,侯云浩.推动厂级监控信息系统中优化负荷分配功能应用[J].中国电力,2005,38(6):51-53.
[7]李少春,程良伦.一种自适应的混合型无线传感器网络拓扑控制算法[J].传感技术学报,2010,23(3)
[8]P H Yang,x P Qia.Direct Computing of Surface Curvatures for Point-Set Surfaces[C]//Eurographics Symposium Oil Point-Based Graphics,2007:25-32.
[9]Ren,B.and L.Cheng.SMT automatic optical inspection path planning based on MDSPSO algorithm.in 2009 International Conference on Computational Intelligence and Natural Computing [C]//CINC 2009,2009.Wuhan,China:IEEE Computer Society.
[10]董大栓,柳存根,谭家华.水火弯板变形的描述方法[J].中国造船,2010,44(1):84-88.
[11]董大栓.水火弯板成形规律及加下参数的确定研究[D].上海:上海交通大学,2009.
[12]Bao,F.Principles and implementation challenges of cooperative transmission for realistic WSN[C]// in 2010 2nd International Conference on Signal Processing Systems,ICSPS 2010,2010.Dalian,China:IEEE Computer Society.
[13]邓燕萍,郭培军.船体外板水火成型工艺参数预报系统设计与实现[J].船舶工程,2008,30(1):61-65.
[14]徐旭,车延博.现代运动控制系统中的运动控制器及其应用[J].机床与液压,2007,35(7):153-154,157.
[15]沈安文,杜宇峰.基于CPLD的数字交流伺服系统接口设计[J].微电机,2006,39(3):54-56.
[16]张伟,龚娇龙,张惠芳,等.基于视觉导航的变电站智能巡检机器人的研究[J].陕西电力,2015(6):63-66,74.
[17]何江萍,马彦,李强.基于视觉特征的水果蔬菜自动分类方法[J].重庆师范大学学报:自然科学版,2016(3):115-120.
[18]杨文韬,王立威,梁一平,等.滤波正弦相位调制干涉测量技术误差分析[J].重庆师范大学学报:自然科学版,2016(2):159-165.
[19]王达,刘莉,王栋,等.基于DSP的配电网谐波分析系统设计[J].供用电,2016(12):15-18.
Three dimensional fast and large scale information measurement system based on binocular stereo vision
YANG Wei
(The 713th Research Institute of China Shipbuilding Industry Corporation,Zhengzhou 450015,China)
Machine vision intelligent detection is a new market,it is more and more widely applied to the production line of high-end products at home and abroad.This paper describes a binocular stereo vision system which can be applied to the rapid and automatic detection of complex surfaces.By Ferguson's simulation of surface shape of the object,using parametric spline curves,space coordinate conversion method to achieve rapid lateral and longitudinal forming measurement.This paper also briefly describes the hardware implementation of the system and software control flow.
binocular stereo vision;light plane equation;focusing mechanism;motion controller
TN273
:A
:1674-6236(2017)06-0190-04
2016-03-19稿件编号:201603251
杨 巍(1985—),男,河南周口人,硕士,助理工程师。研究方向:电气系统控制、电机拖动。
