修井机台面扶管机械手虚拟样机设计
2017-03-27焦伟刚祝克强胡送桥
焦伟刚,祝克强,胡 颖,胡送桥
(三一集团有限公司 湖南分公司,长沙 410100)①
修井机台面扶管机械手虚拟样机设计
焦伟刚,祝克强,胡 颖,胡送桥
(三一集团有限公司 湖南分公司,长沙 410100)①
为减少修井机台面作业工人的工作强度,设计了一套台面扶管机械手,可替代人工完成危险的扶管起下油管作业。借助仿真分析软件ADAMS和ANSYS联合仿真,分析了机械手从猫道接送管柱至井口的各项运动参数,为动力设计选型提供了理论依据;借助刚柔耦合方法,分析了扶管机械手在不同油缸移动加速度下的末端抓手抖动问题。为扶管机械手动力选型、设计改进提供了数据支撑,缩短了产品设计周期。
修井机;扶管机械手;ADAMS;ANSYS;刚柔耦合;虚拟样机
为了节约人工成本,降低工人工作危险性,油田及钻井承包商要求能够实现自动化钻修井作业。目前,钻井自动化管柱处理设备的研发较多,国内外主要钻机制造商大多推出了自动化管柱处理系统的产品[1-3]。修井作业相比钻井作业工期较短,修井设备大多采用车载形式[4-6]。
我国大多数的修井作业中,除了使用液压大钳对管柱进行上卸扣,实现了半自动化之外,其他的井口操作均是人工操作。井口操作主要包括人工对中油管或抽油杆等管柱,推拉扶液压大钳对管柱进行上卸扣;吊环和吊卡的摘、搬、挂,吊卡销子的拔和插;油管或抽油杆的自动拉、送和排放[7-10]3种工作方式。
针对修井作业要求,设计了一套小修作业一体化设备,包括动力猫道、扶管机械手、移动液压钳、动力卡瓦、动力吊卡及接污筒等,成套设备集中控制,可实现台面无人化。本文分析了扶管机械手的各项运动特性,为设计改进提供数据支撑。
1 结构组成
扶管机械手通过机械手支座固定在工作平台上,由前后4个臂架组成,4个臂架通过连接座组成2套平行四边形结构,可实现机械手抓手前部始终处于水平运动状态。
扶管机械手的前后移动由1个油缸推动实现;抓手开合由另1个小油缸实现;抓手上有接管导向板和滚轮,方便油管上下移动。如图1所示。
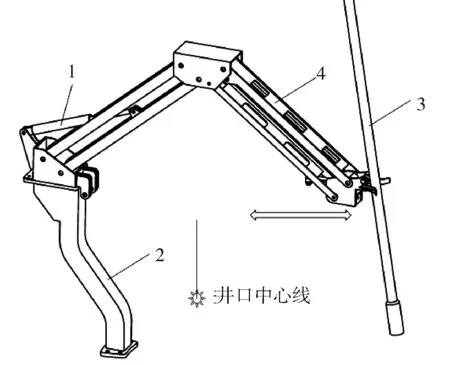
1—油缸;2—基座;3—油管;4—机械手臂架。
2 虚拟样机设计计算


图2 移动油缸随时间伸出长度曲线
提取油管的靠力曲线如图3所示。油管在0~0.3 s自由摆动;0.3~0.5 s油管与抓手靠上并产生冲击载荷,冲击载荷峰值为933 N;0.5~2.0 s油管稳定,等待机械手运动,靠力稳定载荷为105 N;2.0~12.0 s油管随机械手运动至井口中心,扶管力逐渐减小。
臂架油缸推力随时间变化曲线如图4所示,根据整个运动过程中臂架油缸的推力变化,可以选择合适的油缸及油压,对液压系统设计提供参考。由图4可知,在0~0.3 s,臂架处于展开状态,且油管未接触,油缸拉力稳定在2 651 N;在0.3~0.5 s,油管靠上机械手抓手,油缸拉力减小到2 095 N,此处拉力减小是因为臂架处于展开状态,由于自重力会有继续前倾的趋势,而油管靠力与前倾力方向相反,正好抵消一部分作用力;在0.5~2.0 s,机械手处于稳定等待阶段,油缸拉力稳定在2 109 N;在2.0~ 12.0 s,油缸推力因臂架重心逐渐后移而逐渐减小,在12.0 s时,油缸拉力为964 N。
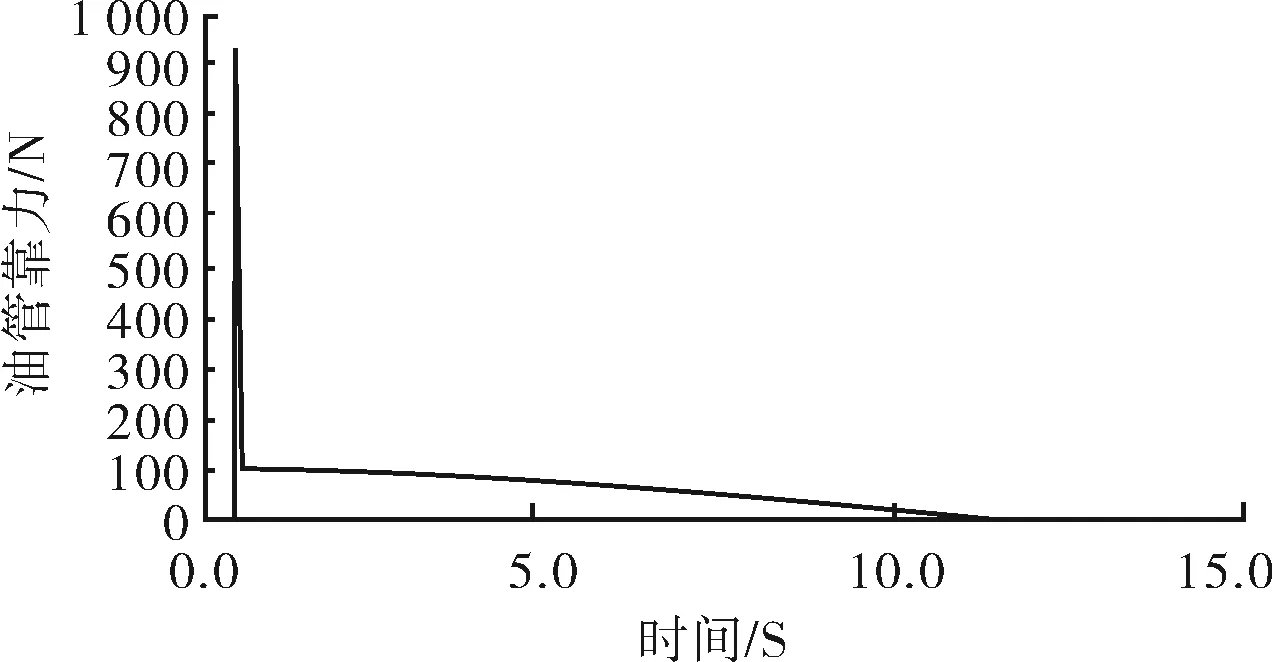
图3 油管靠力随时间变化曲线
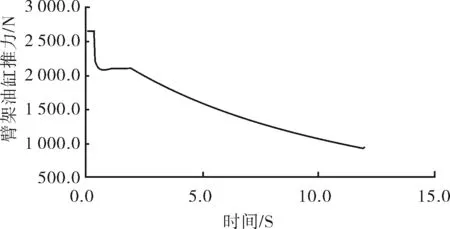
图4 臂架油缸推力随时间变化曲线
提取运动过程中,后主臂与臂架展开抓手的水平位移间的运动关系,如图5所示。由图5可知,油缸移动和抓手前后移动近似成线性关系,机械手展开最大位置是距离后主臂铰点2 330 mm;后主臂转动27.8°后,机械手展开位置是距离后主臂铰点1 130 mm。线性比例关系为(2 330-1 130)/27.8=43.1 mm/(°)。可运用此比例关系在机械手臂架上安装倾角传感器来控制臂架的运动轨迹。
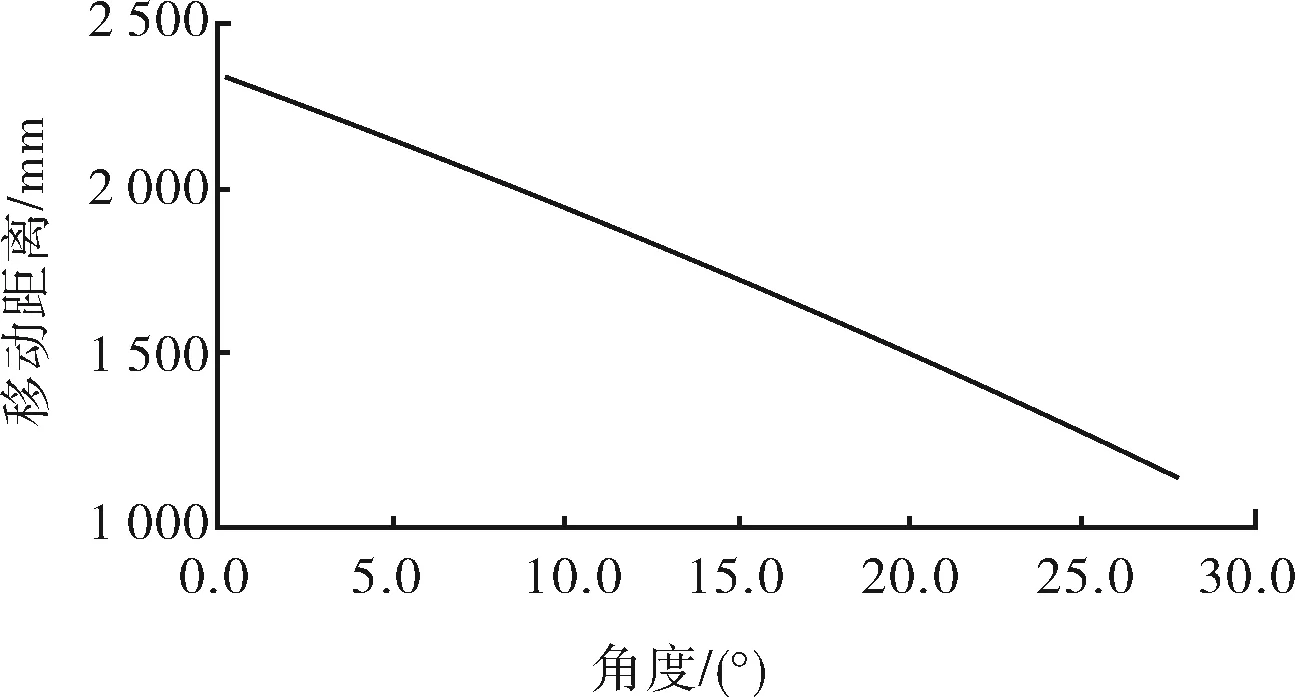
图5 后主臂与抓手前后移动关系曲线
3 刚柔耦合分析
采用三维建模软件Pro/e对扶管机械手的零部件进行简化,建立机械手的三维模型;对臂架的4个臂及基座进行柔性化处理。将臂分别导入ANSYS中划分网格,定义材料弹性模量为2.1×105MPa,泊松比0.3,密度为7 850 kg/m3。臂架的各铰点位置建立关键点,采用MASS21质量单元划分网格,关键点和孔面的节点用刚性区域连接,用ANSYS的ADAMS接口导出柔性体的模态中性文件(MNF文件),导出MNF文件要注意单位换算,可在ADAMS中导入模型后核对。刚柔耦合模型如图6所示。
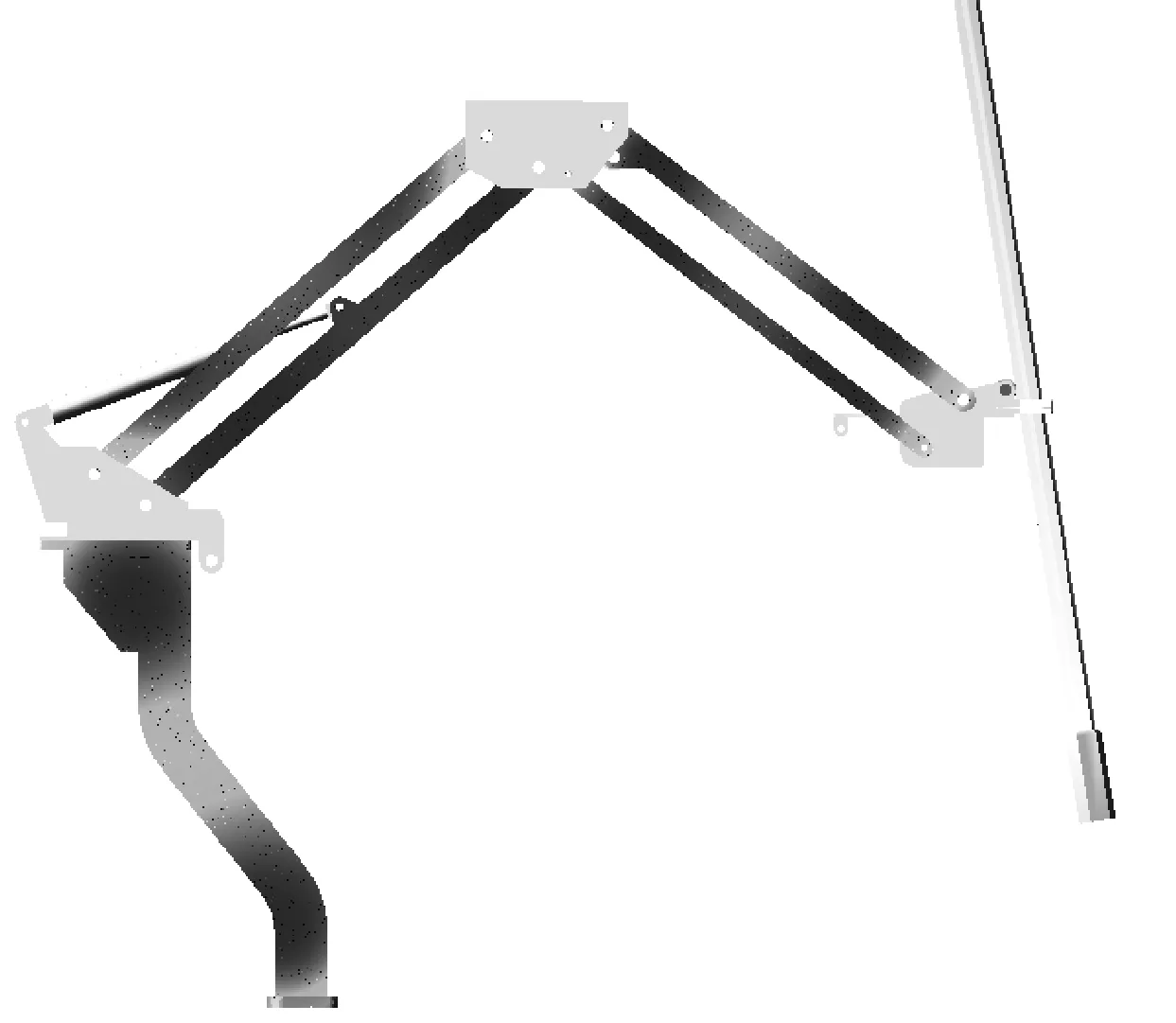
图6 刚柔耦合模型
在柔性体分析中,定义各铰点铰接关系,油缸采用STEP函数驱动,函数定义为:STEP(time,1,0,1.5,-47.5)+STEP(time,5.5,0,6,47.5),提取机械手末端抓手的竖直方向和水平方向位移曲线。如图7~10所示。
根据图7~10可知,末端抓手存在振动现象,同实际情况相符;振动幅度在竖直方向上相对刚体曲线主要是向下的振动,最大偏差3 mm左右,主要是油管靠力对机械手造成压力变形。水平方向上,在0~1.0 s油缸等待阶段,靠力最大,产生的水平振动也越大;随着油管随臂架往井口中心移动,油管靠力逐渐减小,对抓手水平方向的影响也逐渐减小;在6.0 s后,油管到井口中心,抓手在0点附件上下振动。振动幅度在2 mm左右。

图7 末端抓手水平方向位移对比
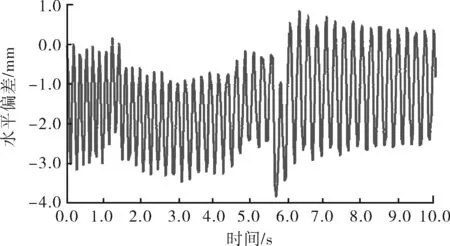
图8 末端抓手水平方向偏差
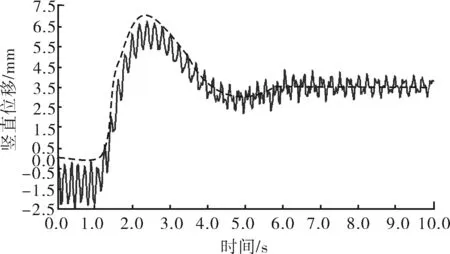
图9 末端抓手竖直方向位移对比
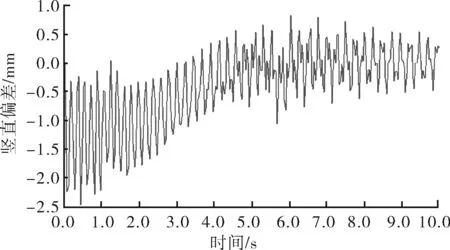
图10 末端抓手竖直方向偏差
保持油缸总行程及运动时间不变,定义不同的油缸运动加速时间和匀速度,加速时间为0.5 s,匀速度47.5 mm/s。修正油缸加速时间及匀速度分别为0.1 s和45 mm/s。函数定义为:
STEP(time,1,0,1.1,-45)+STEP(time,5.9,0,6,45),对比不同加速度下末端抓手的水平和竖直位移偏差,如图11~12所示。
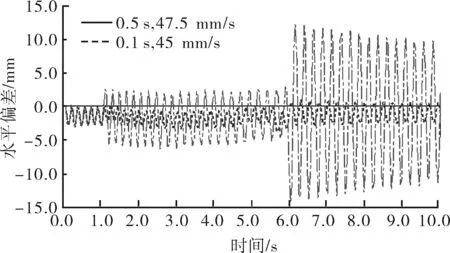
图11 末端抓手水平方向偏差对比
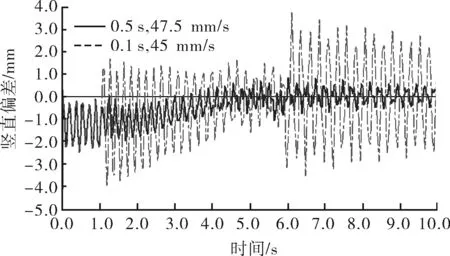
图12 末端抓手竖直方向偏差对比
根据图11~12可知,不同油缸加速度下,对机械手末端抓手的水平及竖直方向位移偏差影响较大。在0~1.0 s等待期,振幅相同;在1.0~6.0 s运动阶段,加速度大,造成的振幅也较大;在6.0~10.0 s停止阶段,加速度大,造成的振幅更大,水平振动达到15 mm,竖直振动达到4 mm。设计要求机械手能够准确停在井口中心位置,方便上下油管对扣,这就要求控制油缸的启动及停止加速度,避免末端抓手有较大振动。
4 结语
利用ADAMS刚体运动分析,得到扶管机械手的各项理论运动特性,为油缸动力设计选型及后续结构强度计算提供了理论依据。利用ANSYS和ADAMS联合仿真,分析得到柔性体结构更加符合实际工况,机械手末端抓手存在振动,且振动幅度随油缸运动特性变化。在不影响运动效率的前提下,油缸运行越平稳,末端抓手的振动幅度越小,越容易控制。需对臂架结构刚度进一步加强,同时优化液压系统,避免急启急停,造成振动激励。
[1] 何鸿.钻井平台钻杆自动化排放系统方案设计[J].石油矿场机械,2012,41(9):82-84.
[2] 张洪生,杨帆,姚璐璐,等.陆地钻机桅杆式钻杆自动排放系统研究[J].机械制造,2012(2):43-44.
[3] 童征,郑立臣,牛海峰,等.陆地钻机用二层台管具排放系统设计[J].石油机械,2011,39(8):27-29.
[4] 熊楚良,黄松和,朱鹏飞.码垛机器人刚柔耦合动力学仿真分析[J].包装工程,2015,10(19):84-88.
[5] 王江勇,王基生,张俊俊,等.单自由度柔性机械臂刚柔耦合动力学仿真研究[J].机械设计与制造,2012(12):54-56.
[6] 肖易萍,常玉连,李晋,等.扶正机械手推送油管的机液联合仿真分析[J].石油矿场机械,2011,40(1):51-54.
[7] 王岩.新型修井作业油管移运自动化系统设计与仿真[D].大庆:东北石油大学,2011.
[8] 耿玉广,谷全福,孙连会,等.小修作业远程起下管柱装置的研制[J].石油机械,2015,43(10):96-101.
[9] 张喜庆,沈君芳,牟忠良,等.油田修井作业自动化装备研制[J].石油矿场机械,2015,44(9):64-67.
[10] 常玉连,姜开勋,攀岩松,等.钻修井作业中管柱处理系统的技术发展[J].石油机械,2012,40(1):87-94.
Racking Platform Pipe-handling Robot Virtual Prototype Design
JIAO Weigang,ZHU Keqiang,HU Ying,HU Songqiao
(HunanBranch,SanyGroupCo.,Ltd.,Changsha410100,China)
In order to reduce platform worker frequent tripping operation,the Racking Platform Pipe-handling Robot is used to replace worker to handle the dangerous work in platform.In this paper,joint simulation analysis software ADAMS and ANSYS simulation are used to analyze all movement parameters of the Pipe-handling Robot from the cat to the well,for the subsequent dynamic selection it provides a theoretical basis for design,the analysis method of rigid-flexible coupling was the simulation for the end gripper jitter under different oil cylinder acceleration power,for the power selection,design improvements provides date support,shorten the design cycle.Keywords:workover rig;pipe-handling robot;ANSYS;ADAMS;rigid-flexible coupling;virtual prototype
2016-09-18 作者简介:焦伟刚(1982-),男,河南内黄人,主要从事石油机械设备产品设计及研发工作,E-mail:fyxyd@163.com。
1001-3482(2017)02-0035-04
TE935
A
10.3969/j.issn.1001-3482.2017.02.008
