极区冰基拖曳式海洋剖面浮标系统低功耗设计与实现
2017-03-26饶开友纪旭鹏陈健梅董永军张洪彬郭景富
饶开友, 纪旭鹏, 陈健梅, 李 涛, 董永军, 孙 超, 张洪彬, 姚 楠, 郭景富
极区冰基拖曳式海洋剖面浮标系统低功耗设计与实现
饶开友1, 2, 纪旭鹏3, 陈健梅1, 2, 李 涛3, 董永军1, 2, 孙 超1, 2, 张洪彬1, 2, 姚 楠1, 2, 郭景富1, 2
(1. 东北师范大学 物理学院, 吉林 长春 130024; 2. 吉林省先进能源开发与应用创新重点实验室, 吉林 长春 130024; 3. 中国海洋大学 海洋与大气学院, 山东 青岛 266100)
针对极区冰基拖曳式海洋剖面浮标长期稳定获取极区水文和气象数据的工作需求, 进行了浮标系统的低功耗方案设计。该方案基于超低功耗51系列微处理器, 根据最低功耗工作模式与最短工作时间原则, 采用高效的电源管理机制对浮标系统各个部分的能量消耗进行合理的分配与管理, 并应用了Argos卫星通讯模块ARGOS-3 PMT-RFM的BPSK调制低速数据传输模式, 可有效降低浮标系统的整体能耗。该浮标在北极冰站上长达1年的运行情况表明该系统工作稳定, 所采用的低功耗能量管理方案实现了浮标系统长期连续观测的需求。该浮标的成功试验和推广应用有助于极地研究人员更准确地分析海冰变化过程。
低功耗; 剖面浮标; 微处理器; 能量管理; ARGOS-3卫星通讯
近年来, 愈演愈烈的全球气候变化导致的极区海冰及冰盖变化加速[1], 包括中国在内的世界各国对气候敏感的南北极区域的关注度日益增加。利用浮标观测系统获取极区海洋水文气象数据是研究海冰快速变化过程进而预测全球气候变化的重要手段[2]。冰基剖面浮标是在ARGO (Array for Real-time Geostrophic Oceanography)计划背景下发展而来的专门针对极区海冰条件及恶劣气候环境获取冰下海洋数据的仪器[3-4]。冰基剖面浮标不同于普通的极区冰上浮标表现在: 数据量需求大, 机械结构及运行程序复杂, 整体功耗偏大。因此为保证剖面浮标系统长期稳定独立运行, 需进行合理的低功耗方案设计。
国际上极区海洋剖面浮标应用较为广泛的是美国伍兹霍尔海洋研究所(Woods Hole Oceanographic Institution)研制的ITP(Ice-Tethered Profiler)浮标以及加拿大Metocean公司与日本海洋地球科技中心联合研制的POPS(Polar Ocean Profiling System)系统[5-6]。这两套浮标系统的主要优点是下潜深度大、采集数据多、设计寿命长等, 存在的问题是体积重量大、制作及布放成本高, 同时这两套系统的剖面浮标爬升方式限制了其冰下海洋最上层水文数据的采集。
受限于极地科考条件以及仪器开发布放成本, 国内关于海洋剖面浮标的研究主要集中在近海开阔性海洋监测领域, 几种不同类型的技术应用包括: 传感器节点固定的锚链式剖面浮标[7-8]、电机驱动爬升的系缆式剖面测量平台[9]以及浮力控制的深海垂直剖面观察系统[10]等。针对极区冰下海洋剖面的测量, 2003年国家海洋技术中心在北极布放了自行研制的极区卫星跟踪水文气象观测浮标[11], 但该浮标仅能够获得3组温盐数据, 不能满足极地研究的实际需求。目前, 国内对于极区海洋剖面浮标的研究仍处于探索试验阶段。
针对国内极区环境条件下监测仪器技术欠缺的现状以及对冰下海洋最上层水文信息的研究需求, 东北师范大学与中国海洋大学联合设计研制了一种极区冰基拖曳式海洋剖面浮标。本文针对该浮标系统需要实现长期连续观测的目标, 设计了浮标控制系统的高效电源管理方案, 对浮标系统各功能模块的能量消耗进行合理的分配与管理, 并采用了Argos卫星模块的低速低功耗数据传输模式, 可有效降低该浮标系统的整体运行功耗, 延长浮标的工作寿命。
1 系统概述
极区冰基拖曳式海洋剖面浮标系统主要由冰上浮标、拖曳通讯线缆以及剖面浮标三大部分组成, 其结构如图1所示。

图1 系统结构简图
冰上浮标集成冰上气象信息采集、GPS定位信息获取、系统数据综合处理、卫星数据通讯、剖面浮标工作状态控制等主要功能, 核心为STC15系列单片机。剖面浮标以Argo浮标为原型设计, 主要利用CTD(conductance, temperature, depth)传感器获取温度、盐度及深度等海洋剖面信息, 同样以STC15系列单片机作为控制器。冰上主机与水下从机通过一条长为125 m的定制通信线缆相连接, 并以RS-485数据通信协议进行主从机之间的数据传输。
浮标系统正常工作时, 从机对剖面浮标在不同深度采集到的剖面信息进行初步处理后打包发送至主机, 主机对接收到的剖面信息进行筛选并将最有价值的数据打包成卫星传输所需要的格式发送给卫星通讯模块, 卫星通讯模块根据卫星系统相关设置自主向远程地面中心发送数据。对于冰上浮标采集到的气象数据及GPS信息, 采用单独打包的方式发送, 避免与剖面数据混淆。
2 低功耗方案设计
极区冰基拖曳式海洋剖面浮标系统的低功耗设计需分析该系统的主要耗能形式, 主要为控制器能耗、外围传感器工作能耗、剖面浮标泵油电机能耗以及卫星通信能耗。由于主从机控制器分别控制着各自相关的模块工作, 因此主机控制系统与从机控制系统的电源管理采用不同的方式。卫星通信系统功耗较高, 工作模式多样, 这里单独提出分析设计其低功耗工作模式。
2.1 主机低功耗设计
主机控制系统以STC15系列单片机为核心, 其与外围模块连接关系如图2所示。

图2 主机控制系统结构示意图
STC15系列单片机具有高速、宽电压、低功耗、抗干扰等特点, 典型工作电流为2.7~7 mA, 有低速、空闲、停机(休眠)三种低功耗电源管理模式, 其中休眠模式的典型功耗小于0.1μA。进入休眠模式后, 单片机可由外部中断以及串口接收管脚电平变换唤醒, 唤醒后从上次设置单片机进入休眠模式语句的下一条语句开始往下执行[12]。
数字化档案的文种形式、载体形式、表达形式都具有多样性,因此数字化档案信息具有多源异构的特点,要建立统一的档案信息关联模型,需要分别采用不同的特征提取方法对多种类型的档案进行特征提取,其中特征信息可能包括时间、人物、地点、类型、保管期限、著录机构等。有的特征信息可以通过著录项获取,有的特征信息需要使用模式识别等人工智能技术从档案内容中提取,这些特征信息都是档案的属性数据,不同的属性数据分属不同的特征视图,将提取到的特征按照不同的视图分别构建特征关联图,再使用数据融合技术融合多个视图下的特征关联图,最终得到档案信息关联模型。为了描述方便,对档案关联模型中的基本元素进行如下定义:
以STC15单片机为核心的主机控制系统根据不同数据时序密度要求进行数据的采集、打包、发送工作, 并按照自由设定的时间对从机进行唤醒操作。如图2结构所示, 对于外围传感器和其他非连续工作器件均由主控制器通过电源芯片控制其供电端, 工作时进行供电, 不工作及时掉电处理。主控制系统在完成设定的工作程序之后将进入空闲时段, 此时除电源芯片及时钟芯片等必要器件之外的外围部分均处于掉电状态, 单片机进入休眠模式将控制器的工作能耗降到最低水平, 下次唤醒方式为时钟芯片产生的闹钟作为单片机的外部中断事件触发唤醒。
2.2 从机低功耗设计
从机控制系统主要功能为控制剖面浮标的上升下潜动作以及处理CTD传感器采集的温盐深数据, 并与主机之间进行数据通信。从机控制系统的结构示意图如图3所示。
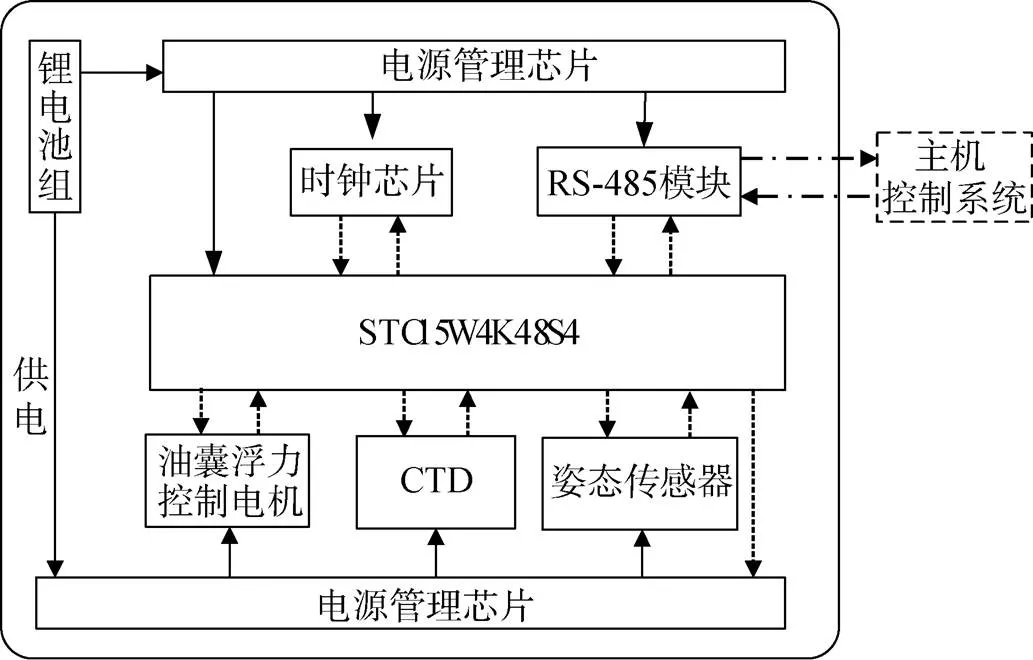
图3 从机控制系统结构示意图
从机控制系统同样以STC15系列单片机为控制器。剖面浮标采用美国海鸟公司的SBE41型CTD传感器, 其工作电压范围为7~16 V, 采样时的峰值电流为350 mA(工作电压12 V)。泵油电机的额定电压为24 V, 额定电流120 mA。由于CTD传感器在较大深度范围内连续工作以及剖面浮标泵油电机工作的高能耗, 导致剖面浮标的整体运行功耗偏大, 因此以剖面浮标为载体的从机控制系统工作周期为12 h, 单片机大部分时间保持为休眠模式。为保证剖面信息采集时主从机的工作同步, 从机控制器唤醒方式为串口接收管脚唤醒, 即由主机控制系统通过RS-485总线发送唤醒命令。
剖面浮标的初始状态为下降到设计要求的水下最深处保持休眠, 并由冰上浮标拖曳跟随海冰运动。为缩短剖面浮标的工作时间降低系统功耗, 设计从机控制系统的工作流程为: 从机被唤醒后控制泵油电机正转从泵向油囊排油, 剖面浮标未上浮之前, 控制器给CTD供电, CTD采集深度信息; 剖面浮标因浮力增加而自行上浮, CTD开始采集温盐深数据; 油囊充满后, 泵油电机自动停转, 剖面浮标继续上升至冰下海水最浅处; 剖面浮标上浮过程与水文数据采集、处理、发送至主机过程同步进行; 当剖面浮标上升到顶时, 从机与主机之间的同步数据传输断开, 主从机控制系统分别开始独立工作; 从机控制CTD传感器掉电, 泵油电机反转收油; 当油囊收油完成时, 泵油电机自动停转, 从机控制除电源芯片、RS-485芯片之外的外围电路处于掉电状态, 从机控制器直接进入休眠模式; 剖面浮标依靠自身重力继续下潜到最深处, 等待下次唤醒。在这种工作模式下, 剖面浮标每次工作时间保持在30 min以内, 其他时间均处于功耗极低的休眠状态。
2.3 卫星通信低功耗设计
卫星通信系统是无蜂窝网络覆盖的远程监测系统不可或缺的一部分, 在远洋观测浮标中有广泛的应用[13]。目前, 较为著名的移动卫星通信系统有铱星、海事卫星、欧星、Argos等几种, 但适用于极区高纬度条件且应用较多的只有铱星和Argos卫星通信系统两种。Argos系统属于极轨卫星系统, 能够在低轨道覆盖南北极以及赤道等高中低纬度地区, 具有较大的应用范围与较低的通讯功耗[14]。鉴于功耗与成本优势, 对于数据量与实时性要求不高的低成本浮标通常将Argos系统作为卫星数据通讯的首选系统。本文选取第三代Argos系统卫星通讯终端ARGOS-3 PMT-RFM作为极区冰基拖曳式海洋剖面浮标的卫星通信模块, 并讨论卫星通信系统的低功耗方案。
ARGOS-3 PMT-RFM为双向数据传输终端, 即除通过卫星向地面中心传送数据外也可接收用户发送的数据命令。数据传输模式分为高、低速两种模式, 单条信息格式有多种, 可满足不同用户需求。ARGOS-3 PMT-RFM正常工作状态分为睡眠和数据传输两种状态, 通过计算Argos星座6颗有效卫星的过顶时间自动与卫星握手进行状态切换。当电源电压为7 V时, 模块在睡眠状态下的电流仅为90 μA。数据传输状态又分为高速数据发送、低速数据发送、数据接收三种模式, 其中高速数据发送模式平均功率为181.60 mW, 低速数据发送模式平均功率为52.33 mW, 数据接收模式的平均电流为85 mA[15]。
由于卫星模块、电机、芯片、传感器等系统部件额定功耗无法降低, 因此通过对部件的合理选型、利用器件的低功耗工作模式以及优化电源管理来降低系统的工作能耗为本文低功耗设计重点。应用本文低功耗电源管理模式所设计的浮标系统低功耗工作流程如图4所示。

图4 浮标系统低功耗工作流程图
3 低功耗方案测试与验证
在完成极区冰基拖曳式海洋剖面浮标系统低功耗方案设计之后, 分两步对该方案进行测试与验证: 首先是在实验室组装应用该低功耗方案的浮标系统并测试实际功耗, 计算预测浮标工作寿命; 第二步是在北极实地布放该套浮标系统之后, 实时监测浮标系统的工作状态, 以验证本文低功耗方案的适用性。
3.1 浮标系统功耗测试
应用本文低功耗方案的极区冰基拖曳式海洋剖面浮标组装实物图如图5所示。
浮标系统各部分在不同工作状态下的实际功耗受多种因素影响, 如单片机工作模式与休眠模式下的功耗不同, 泵油电机与CTD在不同深度下所受压力不同导致的功耗不同, 因此难以通过器件的额定功耗对系统工作时长进行准确的计算。通过对浮标系统主从机进行实际联调测试可获得系统在不同状态下的平均工作电流, 进而根据电池组的容量可对系统工作时长进行估算。实验测试单次不同状态下冰上浮标与水下剖面浮标的平均电流如表1所示。

图5 极区冰基拖曳式海洋剖面浮标组装实物
实验室测试与极区实地工作的区别在于卫星过顶时间、电磁干扰、海水压力、低温环境等各项环境指标的不同。本文浮标系统的供电锂电池采用一次锂亚硫酰氯功率型电池ER34615M, 其在–30℃的低温天气下百毫安放电时的实际有效容量约为常温下的60%, 即温度对浮标系统的实际工作时长影响较大。由于极区冰基拖曳式海洋剖面浮标工作时长的设计要求为一年, 考虑电池效率、环境因素以及设计冗余量, 利用实验室有限条件下的测试数据计算得到的系统工作时长应比浮标设计要求高出50%。冰上浮标配备电源为14.4 V的锂电池, 电池组容量为156 Ah。剖面浮标由于驱动电机的需要, 标配电源为28.8V的锂电池, 电池组容量为221 Ah。若以每12 h采集一次剖面数据以及每小时采集一次气象数据的数据采集密度作为计算标准, 则由实验室测试得到的系统各个状态下平均电流计算得到的冰上浮标单日功耗近似为0.81 Wh, 剖面浮标单日功耗近似为5.78 Wh, 据此结合实际功耗损失估算实验室状态下浮标系统的工作时长为18个月, 满足设计要求。

表1 浮标系统不同状态下冰上浮标与剖面浮标的平均电流
3.2 北极现场布放
2015年8月, 两套应用本文低功耗方案的极区冰基拖曳式海洋剖面浮标由中国海洋大学极区科考人员搭乘韩国“Araon”号科考船成功布放在北极楚科奇深海平原附近海域。在后续连续监测过程中, 1号浮标在稳定工作8个月之后由于未知原因停止工作。截止2016年10月31日, 2号浮标运行状态一切正常, 仍在持续回传各项气象水文数据。由于两套浮标系统规格参数相同, 考虑北极环境超低温、大风、动物破坏等不可抗因素, 其中任意一套浮标系统满足预期设计要求都能验证本文低功耗方案的适用性。
本文随机选取接收到的2号浮标于格林尼治时间2016年9月13日0时至23时在北极东西伯利亚海域(77°14′14.7″N 165°25′03.9″E)发送的24组气象数据(图6)以及当日1时33分发送的一组剖面数据(图7)进行简单分析。
由图6可知, 当日浮标所在位置的气象状况在0时至14时期间变化平稳, 之后则出现剧烈波动。–3℃左右的温度基本符合该地区9月份气象特征, 说明冰上浮标运行正常。从图7剖面数据可看到在水下30 m以内海水温度与盐度变化较小, 30 m之后则有一个较大幅度的上升, 基本符合极区海洋水文特征, 表明剖面浮标运行正常。剖面数据仅采集到水下80多米, 考虑为大风天气下冰层与海水的相对运动导致的拖拽现象, 因此剖面浮标无法下沉至设计最深处。

图6 气象数据曲线图示例

图7 海洋剖面数据曲线图示例
为了继续测试极区冰基拖曳式海洋剖面浮标的稳定性并获取更多的极区气象水文数据, 第二批次规格相同的两套浮标系统已于2016年8月中旬在北极成功布放, 相关数据在持续监测中。
4 结论
本文针对冰基拖曳式海洋剖面浮标的长时间连续运行观测的需求, 设计了以STC15系列单片机为控制器的主从机控制系统的高效电源管理方案, 降低了浮标运行控制系统的功耗; 综合比较选取第三代Argos系统的卫星通讯终端ARGOS-3 PMT-RFM并采用远程低速单向数据传输模式, 降低了系统的卫星数据通信功耗。实验室测试与极区实地运行结果表明: 该极区冰基拖曳式海洋剖面浮标系统的低功耗能量管理方案实现了该浮标系统在极区环境中的长期稳定运行的预定目标。
[1] 陈立奇, 高众勇, 詹力扬, 等. 极区海洋对全球气候变化的快速响应和反馈作用[J]. 应用海洋学学报, 2013, 32(1): 138-144.Chen Liqi, Gao Zhongyong, Zhan Liyang, et al. Rapid change in arctic and antarctic oceans and their feedbacks to global climate change[J]. Journal of Applied Oceanography, 2013, 32(1): 138-144.
[2] 郭井学, 孙波, 李群, 等. 极地海冰浮标的现状与应用综述[J]. 极地研究, 2011, 23(2): 149-157. Guo Jingxue, Sun Bo, Li Qun, et al. Application and development of the buoys based on polar sea ice[J]. Chinese Journal of Polar Research, 2011, 23(2): 149-157.
[3] Roemmich D, Johnson G C, Riser S, et al. The Argo Program: observing the global ocean with profiling floats[J]. Oceanography, 2009, 22(2): 34-43.
[4] Toole J M, Krishfield R A, Timmermans M-L, et al. The Ice-Tethered Profiler: Argo of the Arctic[J]. Oceanography, 2011, 24(3): 126-135.
[5] Krishfield R, Toole J, Proshutinsky A, et al. Automated Ice-Tethered Profilers for seawater observations under pack ice in all seasons[J]. Journal of Atmospheric and Oceanic Technology, 2008, 25: 2091-2105.
[6] Kikuchi T, Inoue J, Langevin D. Argo-type profiling float observations under the Arctic multiyear ice[J]. Deep Sea Research Part I: Oceanographic Research Papers, 2007, 54: 1675-1686.
[7] 刘长华, 王春晓, 贾思洋, 等. 基于10米浮标载体的锚链式剖面观测系统实践之一——自容式采集方式[J]. 海洋科学, 2016, 40(8): 94-99. Liu Changhua, Wang Chunxiao, Jia Siyang, et al. Anchor chain-type profiling observation system based on 10m buoy—self contained acquisition mode[J]. Marine Sciences, 2016, 40(8): 94-99.
[8] 张晓芳, 贾思洋, 张曙伟, 等. 海洋垂直剖面水温实时监测浮标系统研制与应用[J]. 海洋科学, 2016, 40(5): 109-114.Zhang Xiaofang, Jia Siyang, Zhang Shuwei, et al. Research and application of real-time monitoring buoy system for marine water temperatures of vertical profiles[J]. Marine Sciences, 2016, 40(5): 109-114.
[9] 李墨, 李永军. 系缆式剖面测量平台的试验及分析[J].海洋技术, 2008, 27(2): 1-4. Li Mo, Li Yongjun. Test and analysis of moored profilers[J]. Ocean Technology, 2008, 27(2): 1-4.
[10] 杜亮.深海垂直剖面实时监测系统的设计与实现[J].现代电子技术, 2014, 37(1): 107-109. Du Liang. Design and implementation on the real-time measurement system for deep-sea vertical section[J]. Modern Electronics Technique, 2014, 37(1): 107-109.
[11] 熊焰, 张文良, 崔琳.极区卫星跟踪浮标在北极科学考察中的应用[J]. 海洋技术, 2004, 23(2): 54-57. Xiong Yan, Zhang Wenliang, Cui Lin. The application of polar satellite-tracing hydro-meteorological automatic observing buoy in the second Chinese arctic research expedition[J]. Ocean Technology, 2004, 23(2): 54-57.
[12] 宏晶科技有限公司. STC15F2K60S2系列单片机器件手册[R]. 南通: 宏晶科技有限公司, 2014.
[13] 鲍捷. Argos卫星通信系统在北极海冰浮标中的应用研究[D].长春: 东北师范大学, 2012. Bao Jie. Application and study on Arctic Sea Ice Buoys of Argos satellite communication system[D]. Changchun: Northeast Normal University, 2012.
[14] 宋飞, 冯旭哲. Argos系统的发展现状与趋势[J]. 海洋预报, 2012, 29(6): 98-102. Song Fei, Feng Xuzhe. Present status and development trend of Argos system[J]. Marine Forecasts, 2012, 29(6): 98-102.
[15] CLS. PMT RFM–YTR-3000 user manual release 1.6[R].France: CLS, 2008.
(本文编辑: 刘珊珊)
Design and implementation of the low-power management scheme for the Polar Drift-Towing Ocean Profiler
RAO Kai-you1, 2, JI Xu-peng3, CHEN Jian-mei1, 2, LI Tao3, DONG Yong-jun1, 2, SUN Chao1, 2, ZHANG Hong-bin1, 2, YAO Nan1, 2, GUO Jing-fu1, 2
(1. School of Physics, Northeast Normal University, Changchun 130024, China; 2. Key Laboratory of Advanced Energy Development and Application, Changchun 130024, China; 3. College of Oceanic and Atmospheric Sciences, Ocean University of China, Qingdao 266100, China)
Thepolar drift-towing ocean profiler is required to work for a long time in order to obtain more hydro-meteorological information about the polar region. Therefore, to address this, a low-power scheme for the buoy system is designed in this paper. The application of efficient energy management with the 51 series micro control unit at its core contributes to reasonable power distribution which is in accordance with the principle of the minimum-power operation mode and the shortest possible working time. The Argos module (ARGOS-3 PMT-RFM) is used to provide low-speed data transmission by BPSK modulation. Consequently, the overall power consumption of the buoy system is reduced effectively.The operation of the buoy system for one year in the floating ice of the Arctic shows that the system has been working with stability, and that the low-power management scheme has fulfilled the requirements of long-term observation for the buoy system. The successful testing and application of the buoy is useful for polar researchers making more accurate analyses of the change processes of sea ice.
low power; profiler; micro control unit; power management; ARGOS-3
Dec. 19, 2016
饶开友(1991-), 男, 江西九江人, 硕士研究生, 研究方向为海洋监测技术及嵌入式系统, 电话: 17090409257, E-mail: raoky290@nenu.edu.cn; 郭景富,通信作者, 博士, 教授, 研究方向为应用物理及海洋监测技术, E-mail: guojf217@nenu.edu.cn
P715.2
A
1000-3096(2017)09-0027-07
10.11759/hykx20161219002
2016-12-19;
2017-03-06
吉林省省级产业创新专项资金项目(2016C059); 国家海洋能专项资金项目(GHME2016YY03)
[Industrial Innovation Special Foundation of Jilin Province, No.2016C059; National Marine Energy Special Foundation of China, No.GHME2016YY03]
